
The boundaries and capabilities of autonomous underwater vehicles (AUVs) are being continuously pushed and expanded. Their benefits are clear: allowing longer missions underwater with minimal human support, from a vessel or shoreside, supporting persistent maritime surveillance.
Being able to maintain surveillance missions for months on end is attractive, especially for countries with long coastlines, like Canada. But fully meeting this vision is often hindered by the need to recover underwater vehicles for recharging, data access and mission updates. Launching and recovering AUVs at sea is also risky: to the assets and the humans involved. Anything involving splash zone and crane operations is a risk.
AN ‘IN-FLIGHT’ ROUTE TO PERSISTENT MARITIME SURVEILLANCE?
Fighter jet mission duration can be extended by inflight refuelling, so why not do the same for AUVs, just underwater? In fact, International Submarine Engineering (ISE) has recently successfully demonstrated this type of concept, supported by underwater acoustic positioning systems from Sonardyne. It’s a concept that would enable multiple vehicles, supported by a single uncrewed surface vessel (USV), to operate for long periods without needing to be brought to the surface or recovered to deck or quayside.

It’s a project being run in partnership with Dalhousie University and is being funded by Canada’s Innovation for Defence Excellence and Security fund (IDEaS), with the goal to use the dock for the purpose of persistent maritime surveillance.
Jason Epp, Electrical Engineer from ISE, says, “Enabling persistent maritime surveillance is a key goal. Canada has one of the longest coastlines in the world. From a defence aspect, it helps to have a fleet of vehicles that can be supported from a single vessel without repeated launch and recovery operations, making these missions safer and more efficient.”
ISE has been working on this concept for about two years. Late last year ISE performed full in-water trials of its towed docking system, supported by a combination of technologies – sonar, visual and acoustic.
TOWED DOCKING – WITH SONAR, VISUAL AND ACOUSTIC SUPPORT
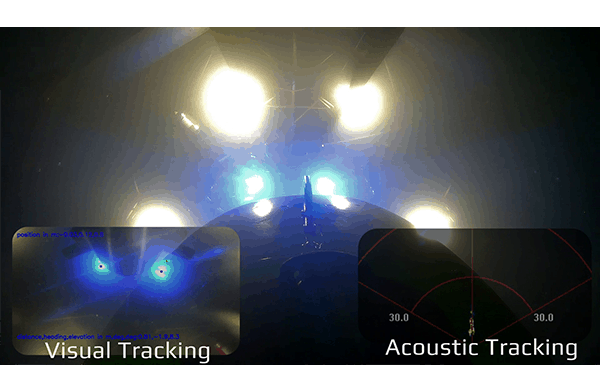
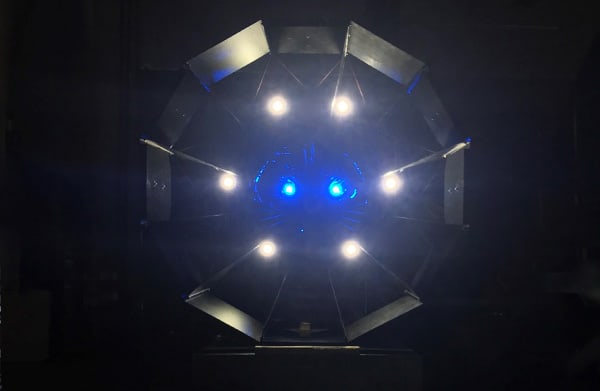
“We’re using our standard Explorer AUV, which can already operate on its own,” explains Epp. “It has a modified nose cone, which includes a latching mechanism. We’ve also added an obstacle avoidance sonar with a horizontal beam pattern for tracking the towed dock. It also has a relatively low-cost low-light camera system, which will be used to track an array of eight LEDs on the dock for the final approach. In addition, the vehicle also has an AvTrak 6 tracking and telemetry transceiver.
“The towed dock itself is relatively simple. It has a corresponding latching mechanism, with a motor or actuator controller for unlatching, a depth sensor, attitude and heading reference sensor, the LEDs and a Nano transponder. Soon it will also have charging and data upload capabilities. In addition, we used a Ranger 2 Ultra-Short BaseLine (USBL) system onboard the towing vessel.”
READY, STEADY, DOCK, IN INDIAN ARM
The trials were run late last year, in Indian Arm fjord, near Vancouver, Canada. On repeated runs, the AUV, at about 20 m below the surface, to avoid surface turbulence, used its obstacle avoidance sonar to get within 10 m of the dock. From there, it switched to the visual tracking, using its camera and the LED array, to close in on the dock. From the surface, Ranger 2 tracked and positioned the AUV and the dock, using the AvTrak 6 mounted on our Explorer AUV and a Nano mounted on the dock, and provided a telemetry link to the AUV.
“Since the Explorer is an autonomous system, once you hit the button, it’s really just about observing it,” says Epp. “But, during the trials, once the vehicle was down in the water, we wanted to be certain where it was and in relation to the dock. Using Ranger 2, we were able to track the location of both at five second intervals with really good accuracy. We could also get vehicle status updates, so we could monitor the state of the AUV’s algorithms and see that everything was working on its own, as it should.”
USBL AND DOCKING OPTIONS
While ISE’s trials were very much about testing the ability to locate and dock using the obstacle avoidance sonar and LED lights, the use of Ranger 2 provided the ability to monitor the vehicle and provide confidence in each operation, providing the crew with visibility of both systems throughout each phase of the trial. Ranger 2 can also offer additional options and benefits to these type of operation as ISE moves further down the road with its trials, as we’ll touch on shortly.
First, it’s worth mentioning that there are different Sonardyne USBL systems available, from Micro-Ranger 2, for inland coastal work, to Mini-Ranger 2, which is great for offshore operations, including high elevation tracking, such as towed objects, like a dock or an approaching underwater vehicle. And then there’s Ranger 2, which has everything and goes to full ocean depth. Find out more about our full Ranger family of USBL systems here.
The flexibility of our USBL systems also means that there are lots of options open to technology developers wanting to develop an underwater docking system. “For example, our Ranger 2 family of USBL systems can be enabled with our Robotics Pack, which can calculate the positions of the dock and the AUV and then send the position to both, so that each knows where the other is,” says Chloe Kennard, Sonardyne applications engineer. “It can do this while simultaneously exchanging command and control data, also in both directions, and it can do this with up to 10 objects in the water at any one time.
TRACK, COMMUNICATE, ENSURE NAVIGATIONAL ACCURACY
Even without the Robotics Pack, you can communicate with your AUV and this can help ensure their navigational accuracy. “Many vehicles benefit from being given updates about where they are,” says Chloe. “On the surface, they can locate themselves with GNSS positioning. At the seabed they can use bottom track with their Doppler velocity log (DVL). But in between they’ve to rely on their inertial navigation system and it can drift rapidly.”
What’s more, because all Sonardyne USBL systems speak the same language, whichever you use, you can use the same suite of instruments with it. So, if you start your development work with a Micro-Ranger 2, you can step up to a Mini-Ranger 2, for going offshore and still use the same Sonardyne instruments mounted on the AUV and dock that you used during development – the software and the interfaces are just the same.
For those working with USVs, we also have our Gyro USBL. This is a pre-calibrated USBL transceiver which incorporates AHRS, making it easy to install on any vessel without having to worry about lever arm offsets or calibration. Our latest Gyro USBL is 20% shorter and 19kg lighter than our previous variant, making it ideal for smaller vessels and USVs, as well as vessels of opportunity.
DOCKING OPTIONS
But back to docking… “We’ve also worked with companies working with optical docking using SLAM (simultaneous location and mapping) and QR code symbols, with ArUco and ChArUco – an open-source image-based location methodology,” says John Houlder, pro-user of Ultra-Short BaseLine (USBL) acoustic tracking systems at Sonardyne. “Our BlueComm optical underwater communications system has also been used to provide a live video feed to allow onshore remote pilots to drive AUVs into their dock. But ultimately USBL systems still come into play. We tend to find that although the operating paradigm for many AUVs is autonomous, we still want to know where it is and to be able to control it if necessary. Having a human in the loop is still necessary and desired.
Indeed, “Using Ranger 2 really brought up the level us confidence we had in bringing these two vehicles together and making them connect; something that you normally try to avoid in the marine environment,” says Epp. “It wasn’t the best environment for optical systems, but it worked well. We were able to pick up the lights from 10 m away and use the camera system to close into the dock. It’s all steppingstones to where we want to be.”
NEXT STEPS FOR ISE’S PERSISTENT MARITIME SURVEILLANCE PROJECT
The docking trials were the latest milestone in ISE’s persistent maritime surveillance project, which has been running for about two years. As well as using the trials data to further refine the vehicles autonomy engines, the next steps will include incorporating charging and data upload, says Epp. “Our next step is to get the electro-mechanical options for this locked down,” he says. “There are a few options and solutions we’re looking at.”
“We also want to consider the bigger picture; to operate an entire marine autonomous mission,” he adds. “Right now, we hit the mission button and the AUV dives down and goes to try and find the dock. In the bigger picture, we want to go down to do a mission and then communicate with a USV-towed dock and then dock. So we will be doing more USBL integration, to let the dock, vehicle and USV all know where each other are, so we will be looking at Sonardyne’s Robotics Pack capability. We’ll also be looking to go out into higher sea states, as until now we’ve been in relatively sheltered waters.”
The towed dock will also see some modifications, including making it smaller, which will make it easier to handle and tow through the water. Launch and recovery systems for the towed dock are also being looked at.
So, there’s still more work to be done, but ISE has all the building blocks in place. ISE’s current focus is to move to working with a USV to tow the dock, and to have a towed listening array on the AUV, as part of a persistent maritime surveillance scope. But, adapting the dock to allow for launch and recovery is also in the team’s sights, opening up yet more possibilities for the technology in other applications. We can’t wait to find out more.