The solution
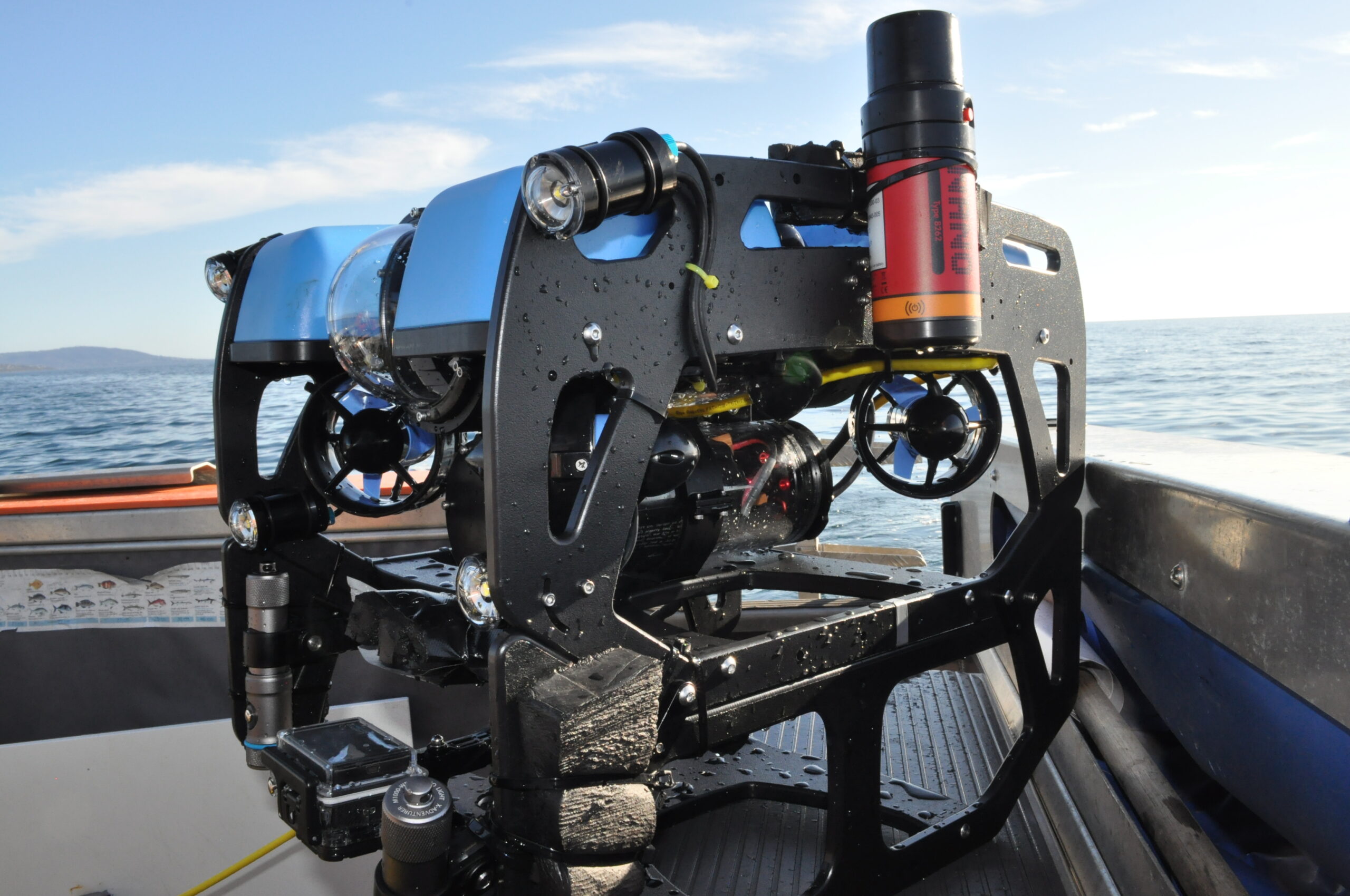
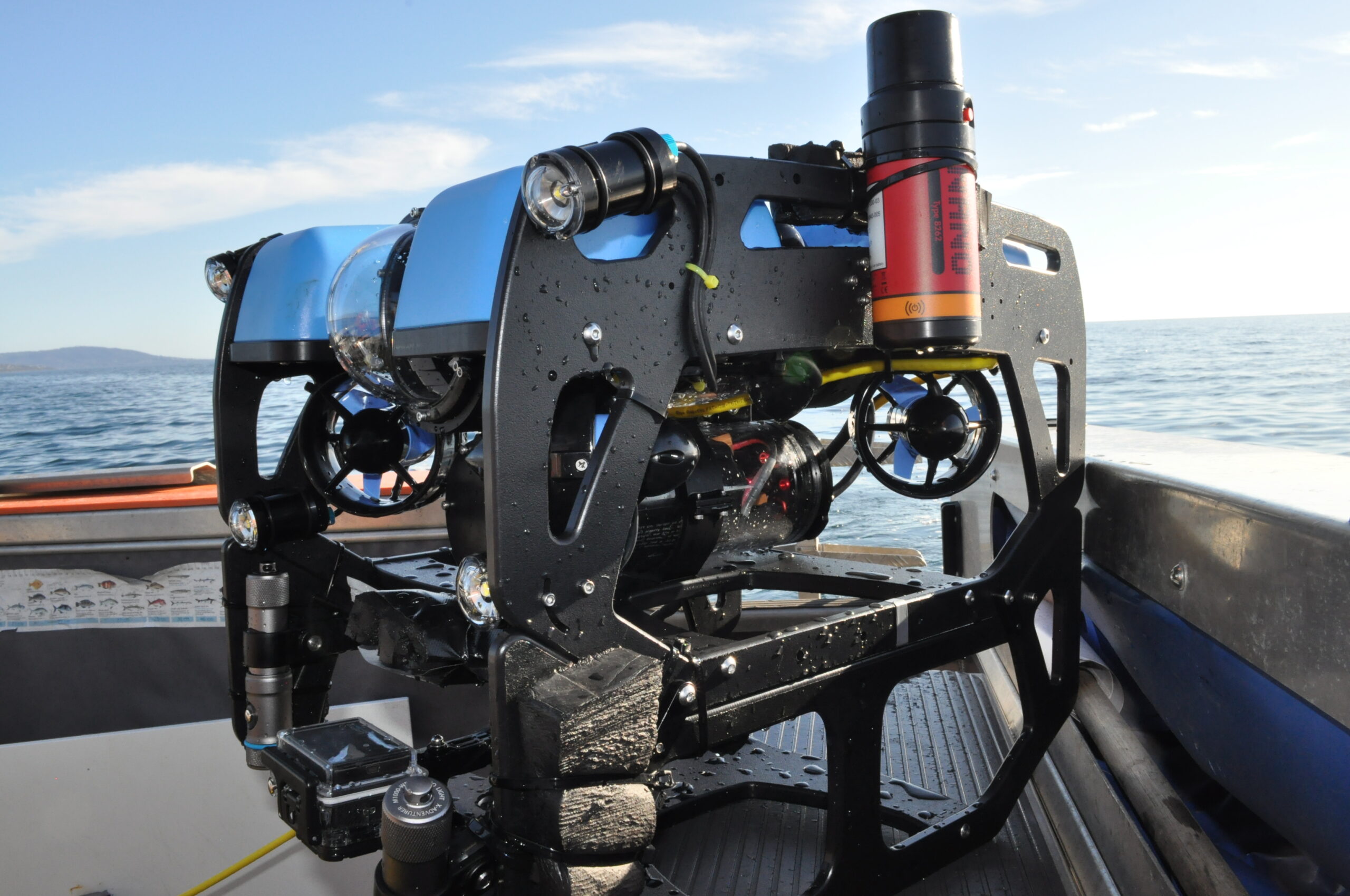
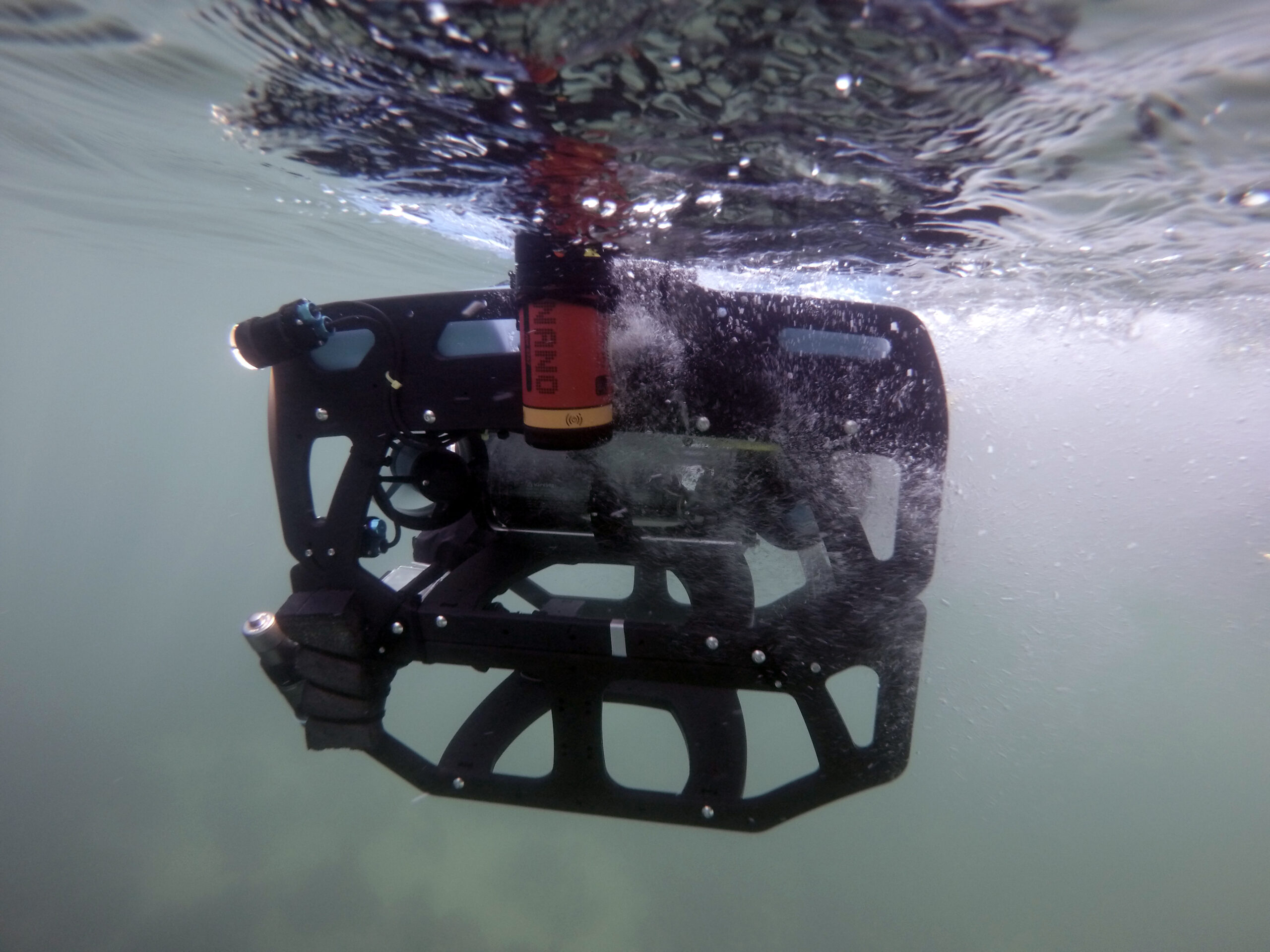
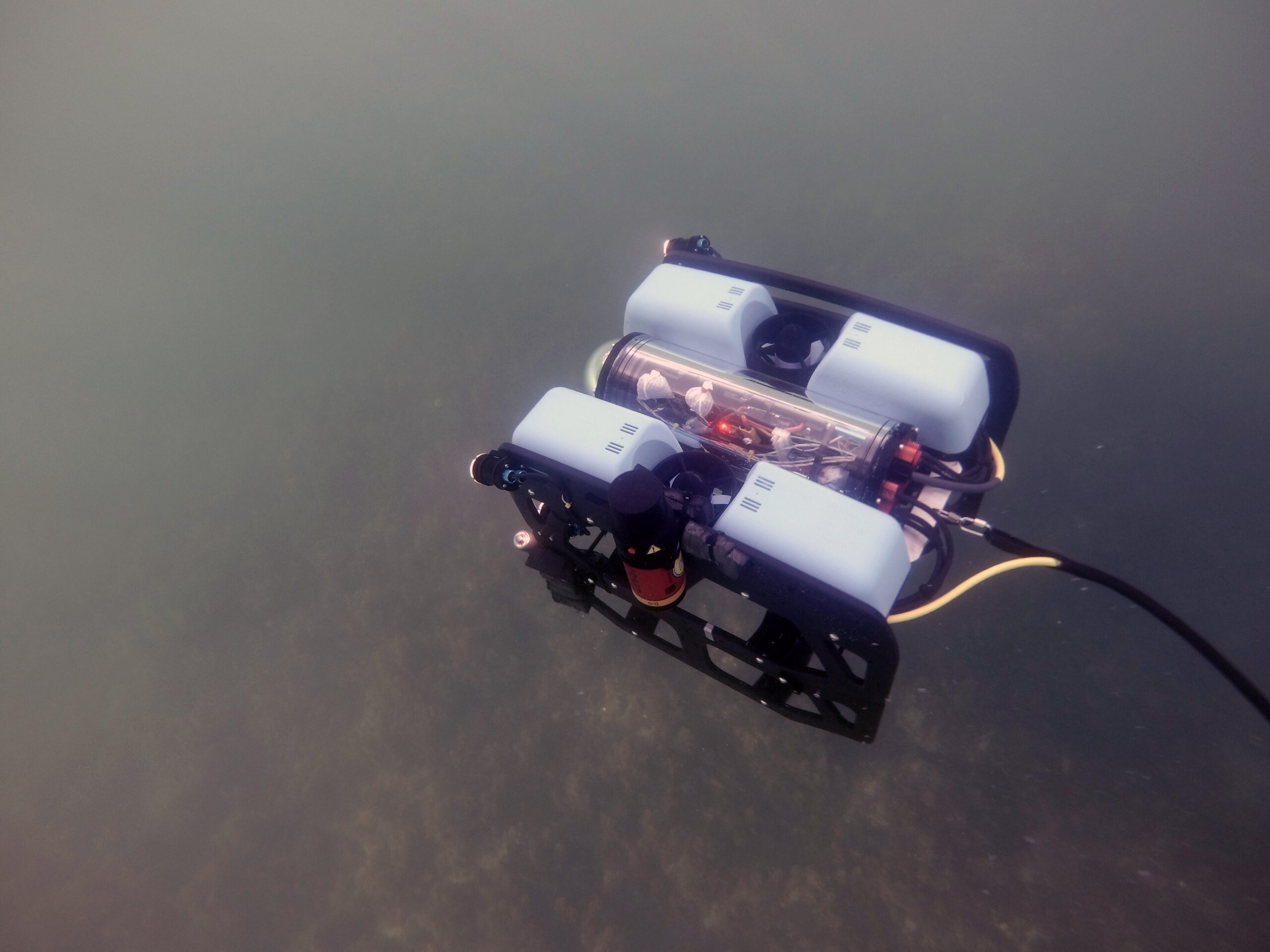
Firsthand ecological research and environmental monitoring are key building blocks of the models and maps needed for supporting the EMP decisions. The BlueROV2 remotely operated vehicle (ROV) from Blue Robotics and a Micro-Ranger 2 USBL from Sonardyne have enabled Fathom Pacific Ltd to capture incredibly detailed HD imagery from the camera they’ve mounted on it. Importantly, the USBL tells them exactly where it was recorded. If divers and other assets are in the water, it can track them as well.
The Micro-Ranger 2 is extremely portable and easy to mobilise making it the ideal solution for small-boat coastal operations and short-notice surveys.
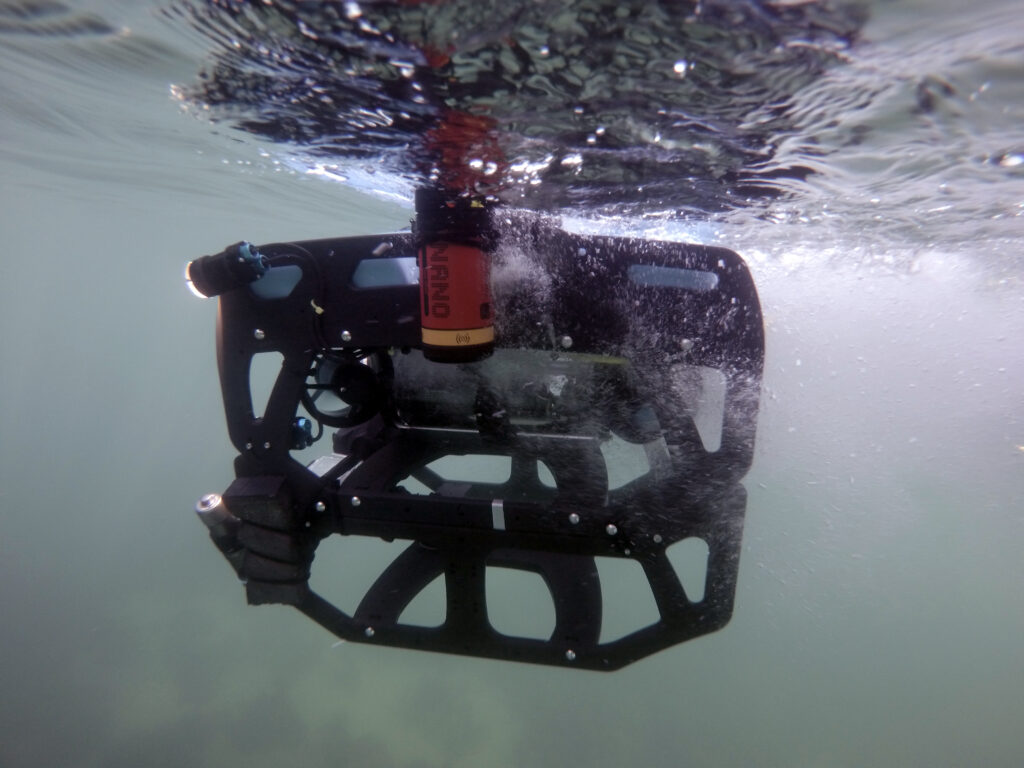
The MRT – the part of the system that communicates with transponders fitted to underwater targets – is so small and light, it has been mounted to the bottom of the stern diver ladder. The range and coverage of the transponder is impressive. Equally impressive are the Nano transponders, these can be strapped to the frame of the ROV or a diver’s tank without affecting balance or freedom of movement. The rechargeable battery lasts for a full day of operations.
Thanks to the instructional videos available on YouTube, the whole system was simple to install and calibrate. Once the software was set up and tested on the laptop, it was put straight to work supporting surveys throughout last winter and spring. The whole set up was often mobilised at very short notice, due to the unpredictable weather windows experienced in Port Phillip Bay.
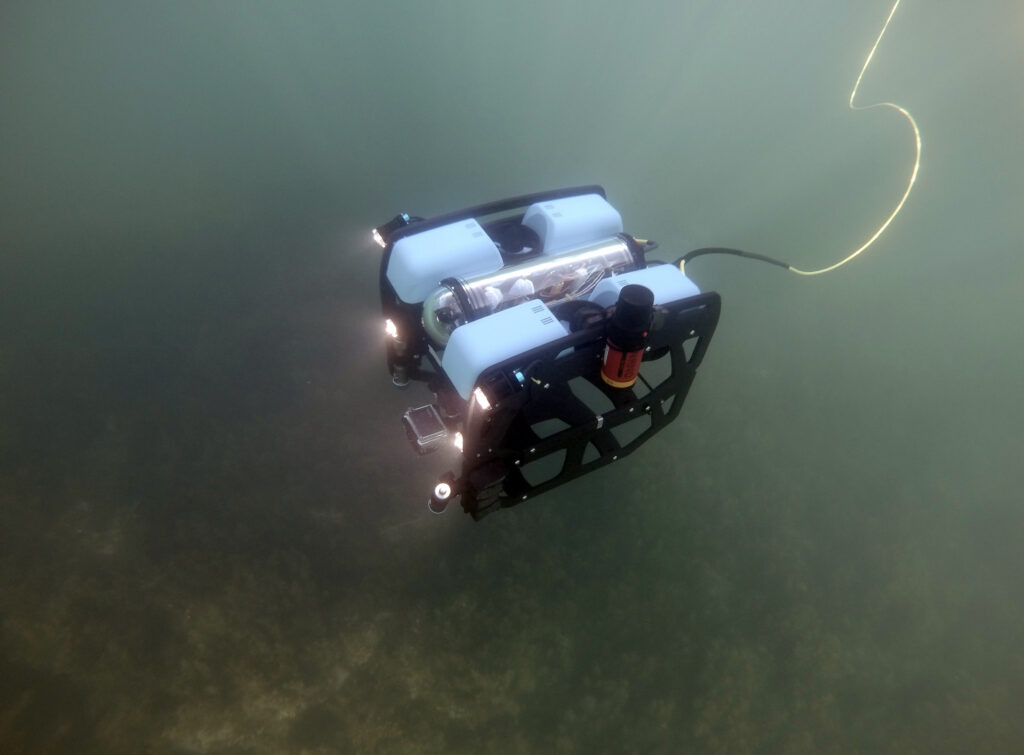
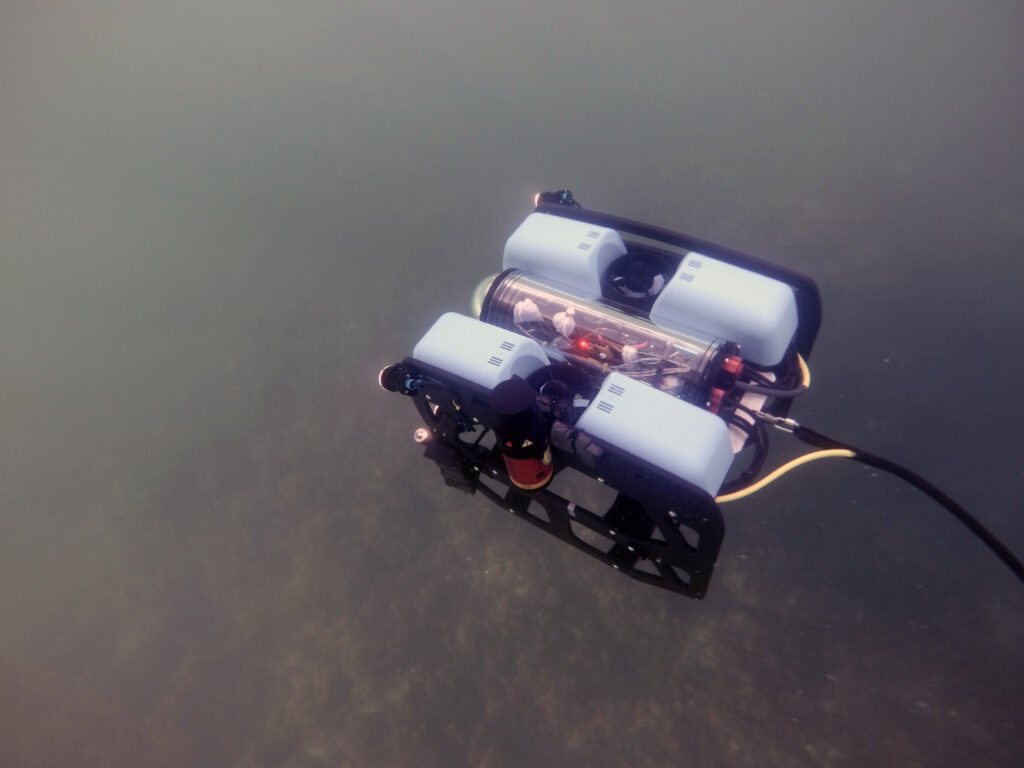
The Micro-Ranger 2 system has accurately and consistently tracked the BlueROV2 in the bay’s shallow waters, even when it has been transecting some 50-100 m from the small MRT transceiver. This is important for the assessment of the bay’s biotopes during which images of the key structural and functional components of temperate reef and sediment biotopes are taken using the ROV mounted HD camera.
ROV transects typically operate in two modes. The first is a ‘video inspection mode’, detailing the canopy, sub-canopy, lower strata and turfing components and identifying the associated macrofaunal biodiversity. The second is a ‘still image mosaicking mode’, where fixed-altitude planar stills are taken to create biotope mosaics.
Using Micro-Ranger 2, Fathom Pacific Ltd were also able to place their analyses of reef biodiversity and biotopes into a spatial context by correlating the imagery data with real world coordinates. This means ground-truth data for biotope modelling can be provided, while also establishing biotope conditions and informing ecosystem models. Exactly the same locations can be visited time and again for future surveys.