


Dude, where’s my ocean robot?
Client: DASA and Dstl
Autonomous naval robots are operating for longer and travelling further. Enabling them to know where they are underpins every mission so we have been investing in navigation technology that improves accuracy over time and distance.
The challenge
Any submariner will tell you that navigating underwater is no easy task. That’s because links to the global navigation satellite system (GNSS) are unreliable. Instead, submariners tend to make do with other sensors. SPRINT-Nav X, is our most accurate system yet, as the UK’s national Defence and Security Accelerator (DASA) and the Defence Science and Technology Laboratory (Dstl) would discover.
It’s a different story for autonomous craft and a lot harder to navigate without a crew. That’s why almost all uncrewed operations at sea today require access to a reliable GNSS signal. Without it, vehicles are literally lost at sea.
Our peer adversaries are investing to develop tools that block our access to GNSS, ensuring they can operate, while we’re left in the dark. It’s not just deliberate signal jamming or degradation of performance – known as spoofing – that can interrupt connections with GNSS. Loss of satellite-based timing and navigation signals needed for positioning occurs where GPS or GNSS receivers may not have a clear line of sight with the sky. This frequently affects ports and harbours situated close to tall structures or even close to cliffs and inside fjords.
We figured there had to be another way to keep track of autonomous underwater vehicles (AUVs) and remotely operated vehicles (ROVs) in challenging underwater environments. So, Sonardyne entered Phase one of the Autonomy in Challenging Environments competition run by DASA on behalf of Dstl.
Featured in this story
SPRINT-Nav
The solution
We started out with the SPRINT-Nav, which is already the world’s highest performing all-in-one hybrid navigator for uncrewed vehicles, to create the hybrid navigation system, SPRINT-Nav X. This is our highest-grade SPRINT-Nav in the SPRINT-Nav family to date.
We innovated to combine four instruments in a single subsea pressure house: an attitude-heading and reference system (AHRS), a depth sensor, a Doppler velocity log (DVL) and an inertial navigation system (INS). All onboard sensors were optimally integrated to provide seamless operation and unprecedented levels of performance when compared with standalone instruments.
SPRINT-Nav also integrates individual DVL beam velocities thus providing sub millimetre level relative accuracy and making SPRINT-Nav robust over structures and rugged terrain.
However, SPRINT-Nav X delivers more certainty and higher accuracy while dead-reckoning and still maintaining the same form factor and weight as the other systems in the family. This level of performance opens the door to improved capabilities while still using commercial-off-the-shelf instruments.
Would this level of performance be sufficient to replace GNSS positioning?
DASA autonomy in challenging environments
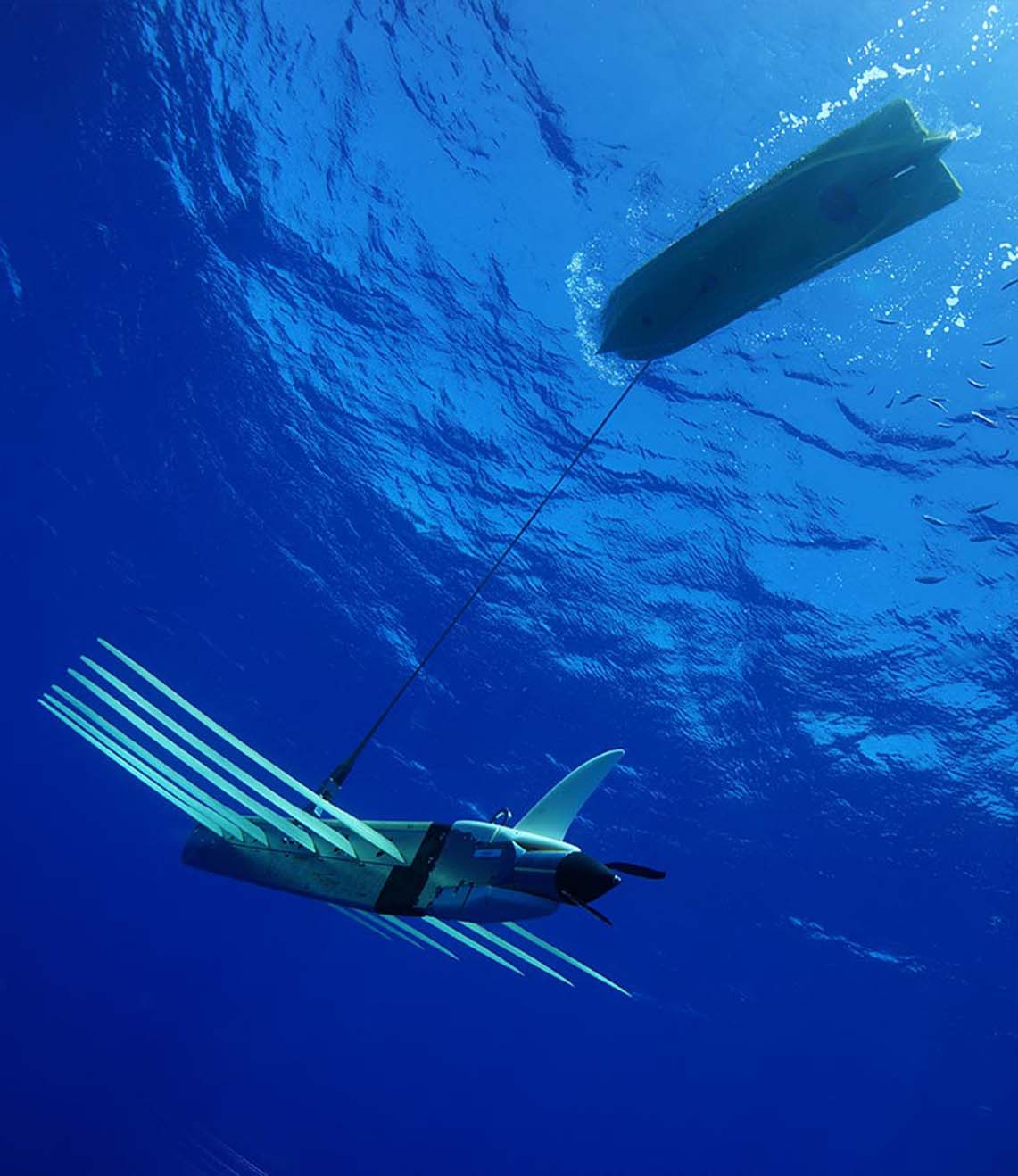
Working with a 12 m-long SEA-KIT X class unmanned surface vehicle (USV), Sonardyne tested and validated SPRINT-Nav. How could we determine if it could be used instead of GNSS? We integrated with a SEA-KIT X and tested it against local GNSS for real-time kinematic (RTK) 50 mm accuracy positioning.
The SEA-KIT is a 10,000 nautical mile-range vessel able to carry up to 2.5 tonnes of payload, deploy and recover AUVs and ROVs. This capability, and flexibility, means it is well suited to support naval missions including intelligence gathering, hydrographic surveying and as a communications gateway.
We learned that SPRINT-Nav can provide a high integrity, continuously available navigation solution for a USV, like SEA-KIT X, operating in littoral zones in water depths up to 150 m.
The results
In 2020, during the exercise the team ran several missions, the longest of these was a 90 km mission that lasted over 13 hours. The mission was conducted in tough conditions with a swell of 2m and approximately 20 degrees of roll in places. The altitude of the USV was anywhere between 0.5 to 70 m from the seafloor with deep and shallow gradients and difficult terrain that included mud, rock, sand and shingle.
The USV moved predictably out to sea on a long straight line and then returned to conduct a traditional lawnmower survey pattern typically used in mine countermeasures (MCM). The drift between the estimated SPRINT-Nav position and the actual GNSS RTK signal never exceeded the 0.01% error relative to distance travelled within the specification, proving that AUVs and ROVs can find their way, with SPRINT-NAv technology. No other COTS system or product matches this performance.
Have you got a similar project?
Challenge us to solve your problem