Engineered for Work-class ROVs

Overview
ROVNav 6 has been superseded by ROVNav 6+
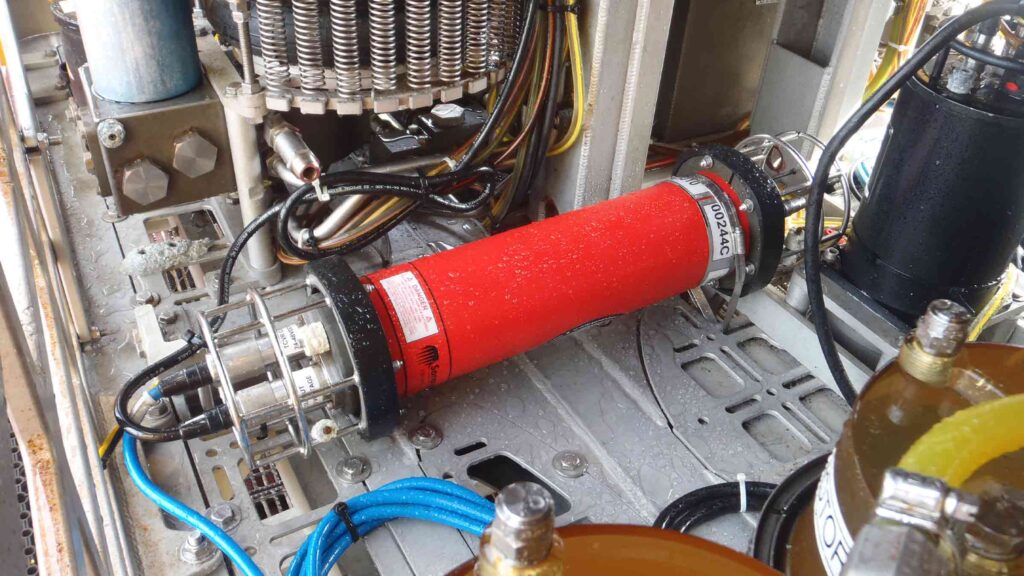
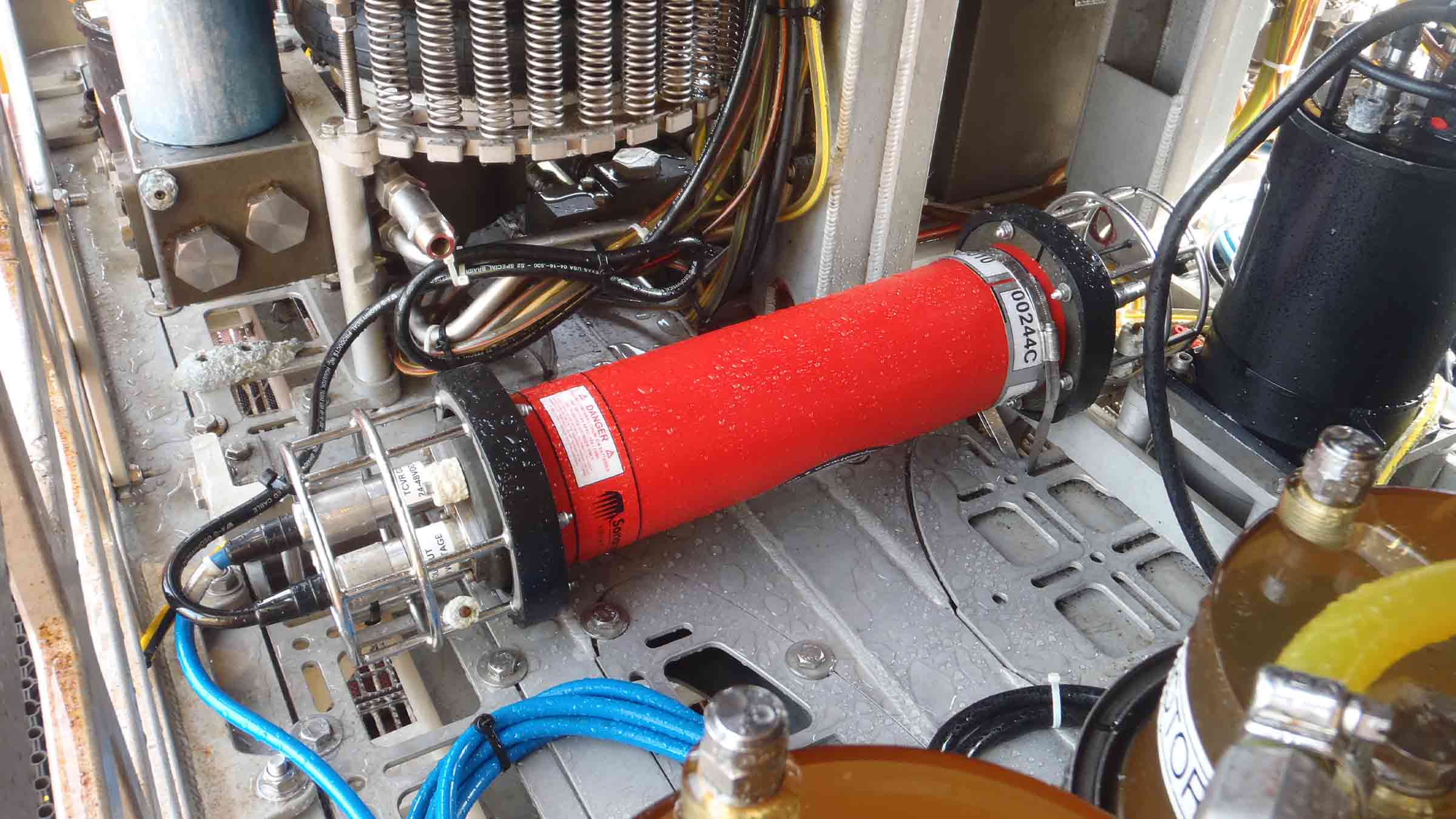
ROVNav 6 is a 6G Wideband 2 ranging LBL ROV Transceiver and telemetry transceiver specifically designed for installation on work class ROVs.
At a glance
- Use it with Fusion 6G
- Wideband 2 enabled
- High power, long range LBL transceiver
- 3,000, 5,000 or 7,000 m depth rated
- USBL mode for emergency ROV relocation
- Modem mode for harvesting data from Sonardyne sensors




Specifications table
| Feature | 8310-3161 | 8310-5261 | 8310-7261 | |
|---|---|---|---|---|
| Depth rating | 3,000 m | 5,000 m | 7,000 m | |
| Operating frequency | MF (20–34 kHz) | MF (20–34 kHz) | MF (20–34 kHz) | |
| Transducer beam shape | Omni-directional | Omni-directional | Omni-directional | |
| Transmit source level (dB re 1 µPa @ 1 m) | 187–196 dB (4 Levels) | 187–196 dB (4 Levels) | 187–196 dB (4 Levels) | |
| Tone Equivalent Energy (TEE) | 193–202 dB | 193–202 dB | 193–202 dB | |
| Receiver sensitivity (dB re 1 µPa) | 90–120 dB | 90–120 dB | 90–120 dB | |
| Range precision | Better than 15 mm | Better than 15 mm | Better than 15 mm | |
| Serial communications (software programmable) |
Primary port | RS232 or RS485 (half-duplex) | RS232 or RS485 (half-duplex) | RS232 or RS485 (half-duplex) |
| Secondary port | RS232 or RS485 (half-duplex) or SYNC IN | RS232 or RS485 (half-duplex) or SYNC IN | RS232 or RS485 (half-duplex) or SYNC IN | |
| Battery life Li-ion (listening) | 3 days | 3 days | 3 days | |
| Operating voltage | 24 or 48 V dc (±10%) | 24 or 48 V dc (±10%) | 24 or 48 V dc (±10%) | |
| External power | Active (listening) | <3 W typical (maximum 10 W when charging) | <3 W typical (maximum 10 W when charging) | <3 W typical (maximum 10 W when charging) |
| Peak (during transmission) | <80 W | <80 W | <80 W | |
| Serial communications connector | AGP (8-way female) |
AGP (8-way female) |
Subconn (8-way female) |
|
| Remote transducer connector | AGP (4-way male) | AGP (4-way male) | Burton (3-way male) | |
| Housing mechanical construction | Hard anodised aluminium 6082 |
Hard anodised aluminium 7075 |
Hard anodised aluminium 7075 |
|
| Remote transducer mechanical construction | Stainless steel 316 | Stainless steel 316 | Stainless steel 316 | |
| Dimensions (maximum) (length x diameter) | 768 x 200 mm | 768 x 200 mm | 768 x 200 mm | |
| Housing diameter | 134 mm | 134 mm | 140 mm | |
| Weight in air/water | Housing assembly | 14.3/5.3 kg | 14.7/5.7 kg | 15.5/6.0 kg |
| Transducer | 3.2/2.7 kg | 3.2/2.7 kg | 3.3/2.8 kg | |
| Cable (5 m) | 2.7/1.4 kg | 2.7/1.4 kg | 2.7/1.4 kg | |
| Sensors | ||||
| Temperature (±0.1°C) | Standard | Standard | Standard | |
| Strain gauge pressure sensor (±0.1%) | Standard | Standard | Standard | |
| High precision strain gauge (±0.01%) | Optional | Optional | Optional | |
| Inclinometer (tilt sensor) Range ±90°, accuracy: ±1° (vertical orientation) |
Standard | Standard | Standard | |
| Sound velocity sensor ±0.02 m/s accuracy under calibration conditions |
Standard | Standard | Standard |
Frequently asked questions
STP files
Datasheets





6G modems make the connection between data and decisions
Two years ago Shell Exploration and Production (Shell E&P) approached Metocean organisation RPS Evans Hamilton Inc to expand the capabilities of their service to measure seabed current profile data at the Walker Ridge area in the Gulf of Mexico.
The challenge
Operations in deep and ultra-deep water (6,000 to 10,000 feet) are challenging for drilling, construction and pipeline installation. These challenges can be made safer and more efficient through a good understanding of subsurface current patterns. For this to be effective, wireless transmission of observations to the surface are essential for instant analysis.
This type of data is usually obtained using acoustic Doppler current profilers (ADCPs) mounted near the surface looking down through the water column. As operational depths increase, a second ADCP, placed on the seabed looking-up, provides the additional data.
The most common approach involves deploying the second ADCP for several months at a time. This is set to log bottom currents at intervals from minutes to hours. While this data is extremely useful for site surveys and planning exploration activities, the delay between collection, instrument recovery, download and analysis, means its usefulness is limited. Particularly when needed for supporting on-site decision making during operations (including complying with government directives). A faster way to retrieve the data collected by the ADCP is needed.
The solution
An acoustic modem directly connected to the ADCP provides a cost-effective and increasingly popular option for providing instant access to the data collected. The modem enables access to the data from almost anywhere in the world.
But not all acoustic modems are made equal. It’s vital to make sure when choosing one for use in an application such as offshore drilling, the signal processing and error correction techniques reliably deliver critical data payloads over long distances and, if needed, through acoustically hostile transmission paths.
RPS Ocean Science identified Sonardyne’s 6G (sixth generation) wireless communications platform as the optimum solution. 6G has an enviable reputation across the region. Today it’s the only acoustic technology to have been proven as a successful monitoring solution during a well containment situation.
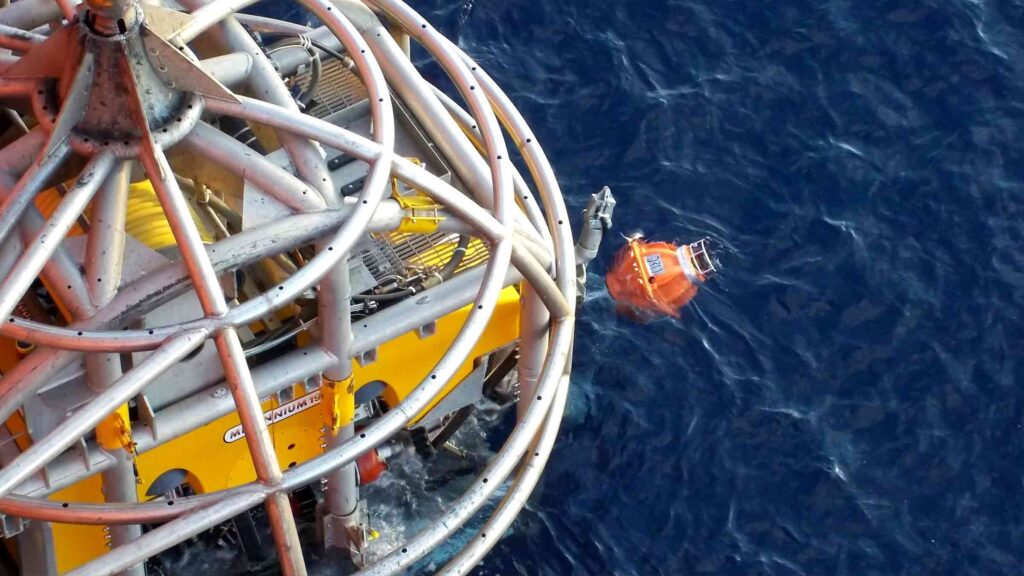
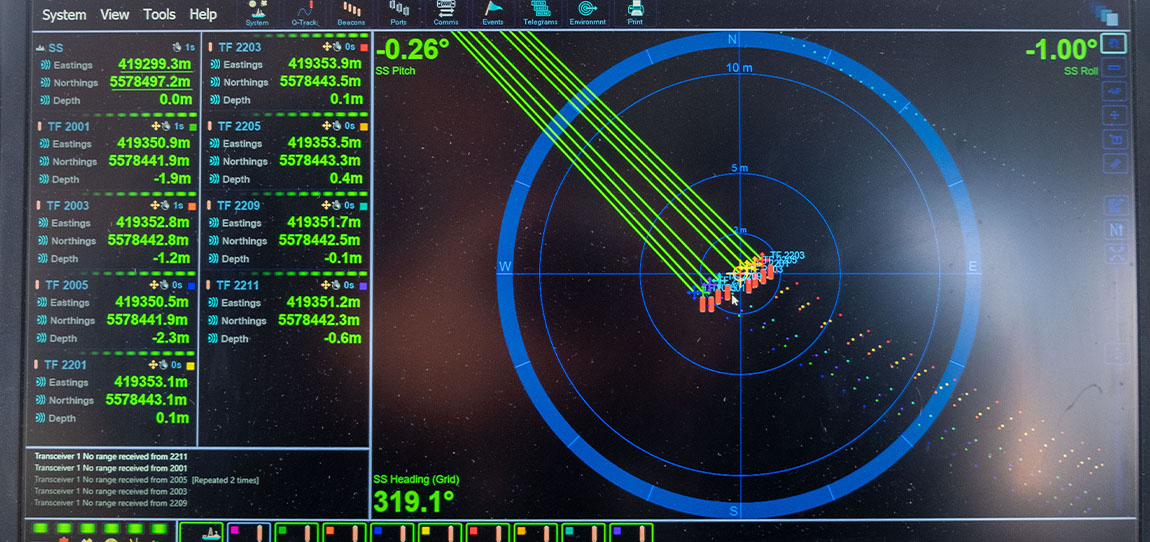
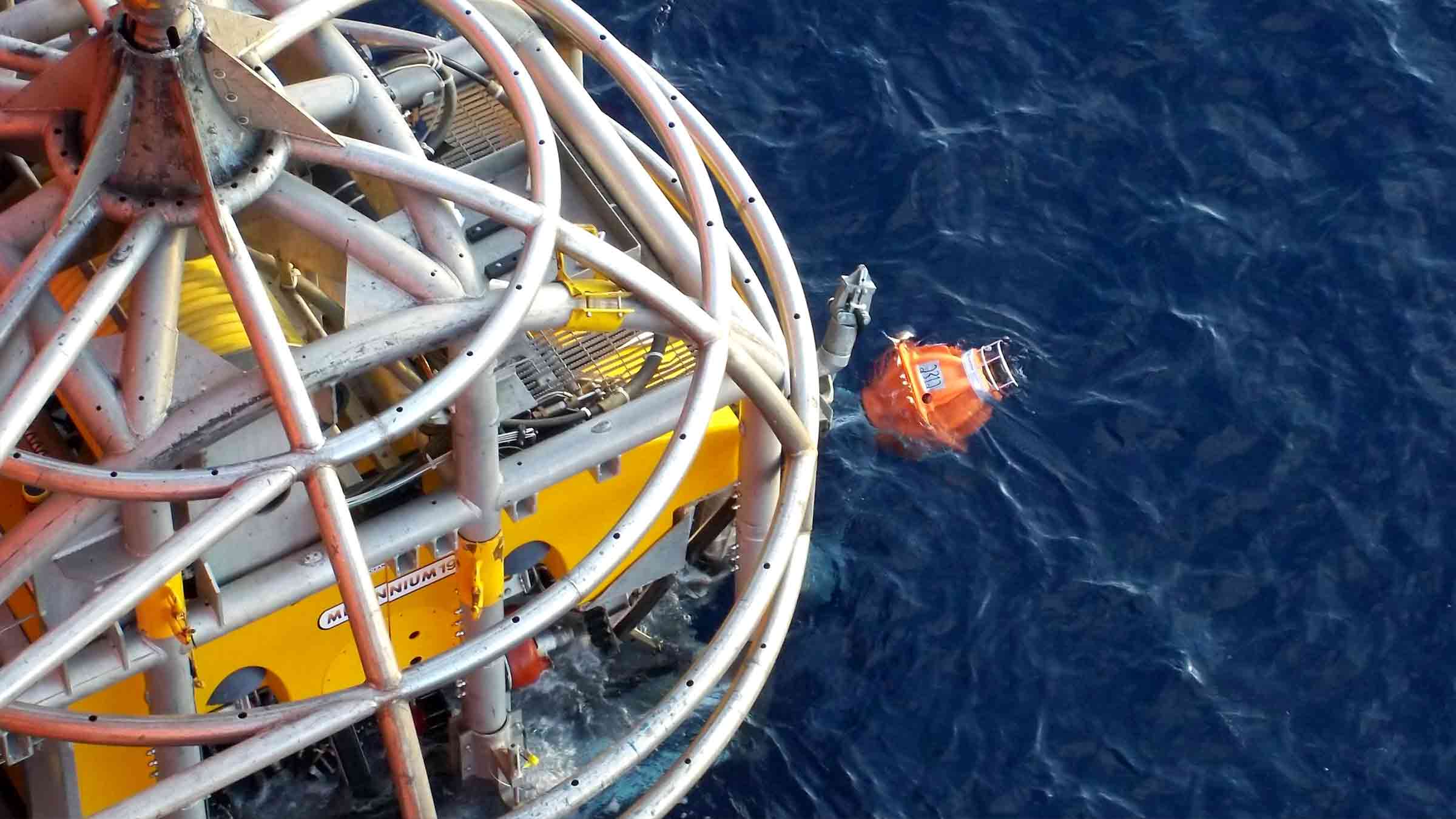
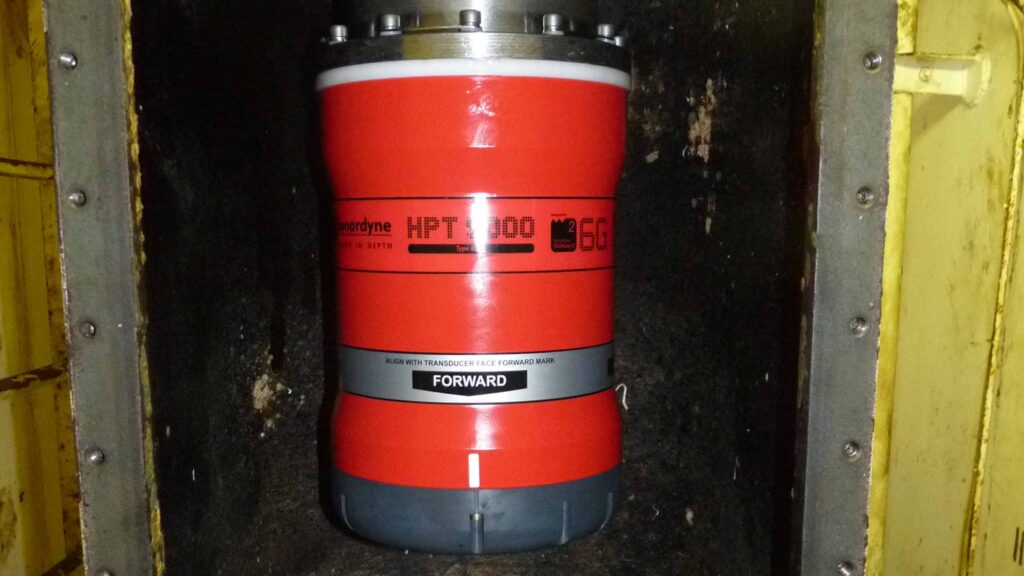
The seabed component of the monitoring system incorporated a Sonardyne Compatt 6 telemetry transponder interfaced with a Teledyne RDI Workhorse 300 kHz ADCP. These were mounted together in a deployment frame. 10,000 feet above, a Sonardyne HPT modem deployed from the rig acted as the surface receiver. It was enclosed within a rugged cage to protect it during deployment and recovery phases, and weighted to prevent drifting in high surface currents.
The HPT was integrated with the data collection system RPS Ocean Science had previously supplied to the rig, this included a 38 kHz ADCP at the surface and load handling system. The Compatt 6G modems and ADCP were deployed by ROV on the seabed at a depth of 9,970 feet, approximately 150 feet away from the rig’s BOP.
After establishing reliable seabed to surface communications, data collection was initiated. The acquisition system is designed to receive and display data from the surface and bottom ADCPs at 10 minute intervals.
Modem 6
0
m
operating depth
0
bps
acoustic comms
The results
Following initial system deployment, the signal analysis tools built into the Compatt 6 and HPT enabled the bidirectional communications link to be optimised for the local conditions. This resulted in highly reliable and low latency data return rates.
Water velocity profiles were generated from approximately three metres to 100 m off the seabed. The profiles were composed of 50, two metre bins. Data was averaged over 75 seconds at a 1 Hz sample rate. Velocity and direction profiles were processed by the subsurface instrument and transmitted to the rig’s data acquisition system where profiles were displayed, along with the velocity and direction profiles from the surface ADCP, on the platform bridge.
The data has been utilised by the metocean team to support exploration operations in daily advisories as well as providing a unique perspective on potential Topographic Rossby Waves thought to be a common feature in the area. Processed data files were also transmitted to our client’s shore-based server and the National Data Buoy Center (NDBC) in near real-time.
A demonstration of the system’s capability took place during the summer of 2015. Since then, the RPS-Sonardyne solution has proven to offer reliable self-contained operation with long service intervals. The configuration of the upward looking ADCP and Sonardyne 6G digital modem technology perfectly complements conventional near-surface and mid-column current monitoring. It also contributes toward lowering operational risk and increasing the safety of drilling, survey and ROV operations in deep water.
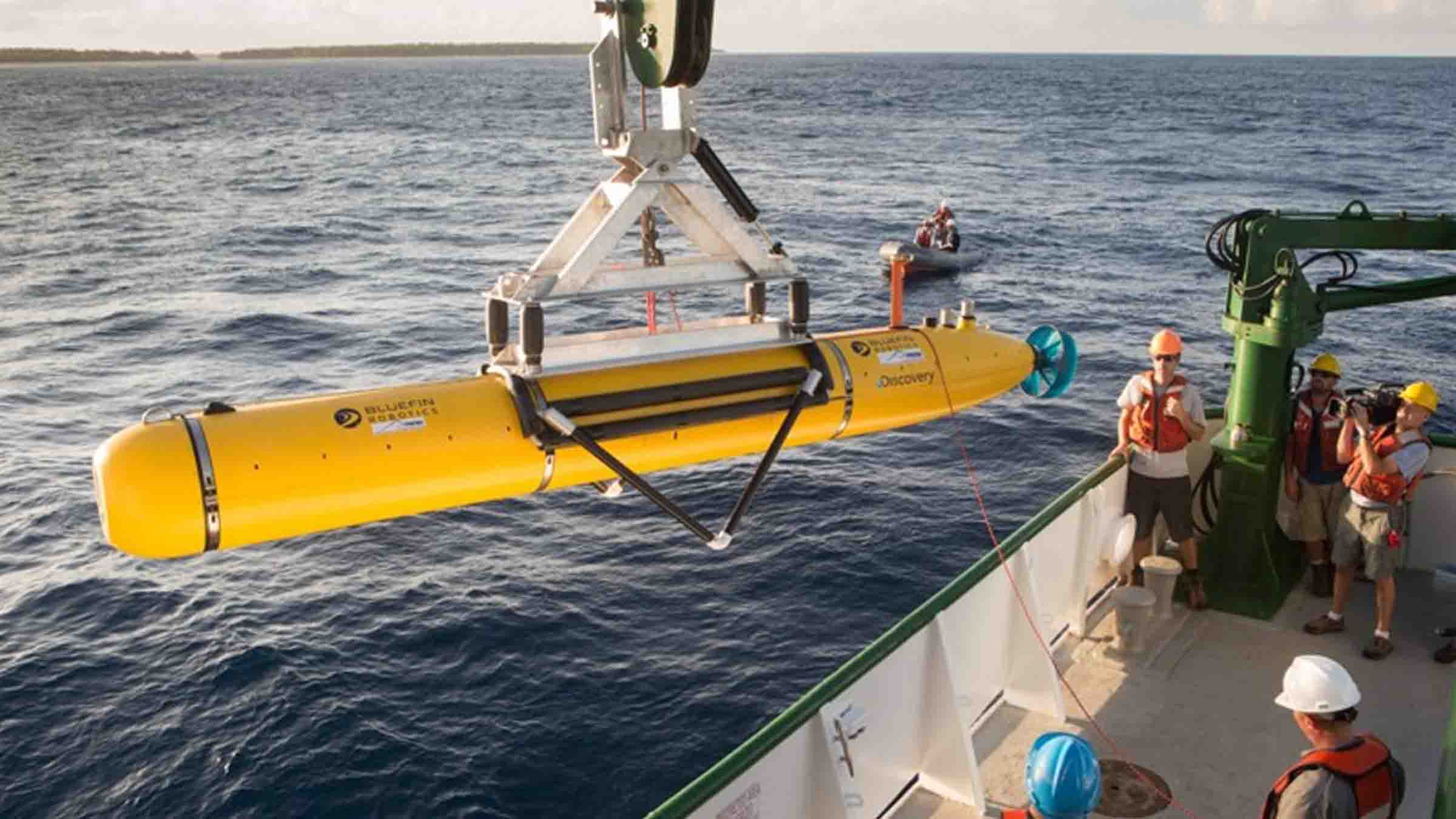
Recovering lost history with Mini-Ranger 2
In its working life, there were more than 2,500 Fairey Barracudas delivered to the Royal Navy’s Fleet Air Arm. That’s more than any other type ordered by the Royal Navy to date. Read how James Fisher Marine Services used our Mini-Ranger 2 USBL system to recover this piece of World War II aviation history.
The challenge
A three-seat, single engine torpedo bomber, it was launched from aircraft carrier decks during World War II, carrying their lethal load to drop on to targets. Despite the numbers that were built, none remain in the UK today, at least not in complete form. However, restoration engineers at the Fleet Air Arm Museum (FAAM) in Yeovilton are looking to change that and a chance find in the English Solent is helping them on their way.
It’s the wreck of a Mk II Fairey Barracuda, discovered in 2018 by James Fisher Marine Services (JFMS) during a UXO survey for a new 204 km long power interconnector between the UK and France as part of the Interconnexion France-Angleterre 2 (IFA2) project.
IFA2 is National Grid’s second electricity subsea interconnector to France and is a joint venture with French System Operator RTE.
The wreck is believed to be one of two Barracuda aircraft which were based at Lee-On-Solent, Gosport. Both planes suffered forced landings in the Solent during WW2, shortly after take-off from HMS Daedalus airfield. While each pilot survived and made it through the remainder of WW2, their planes remained at rest on the seabed.
A challenging acoustic environment for USBL systems
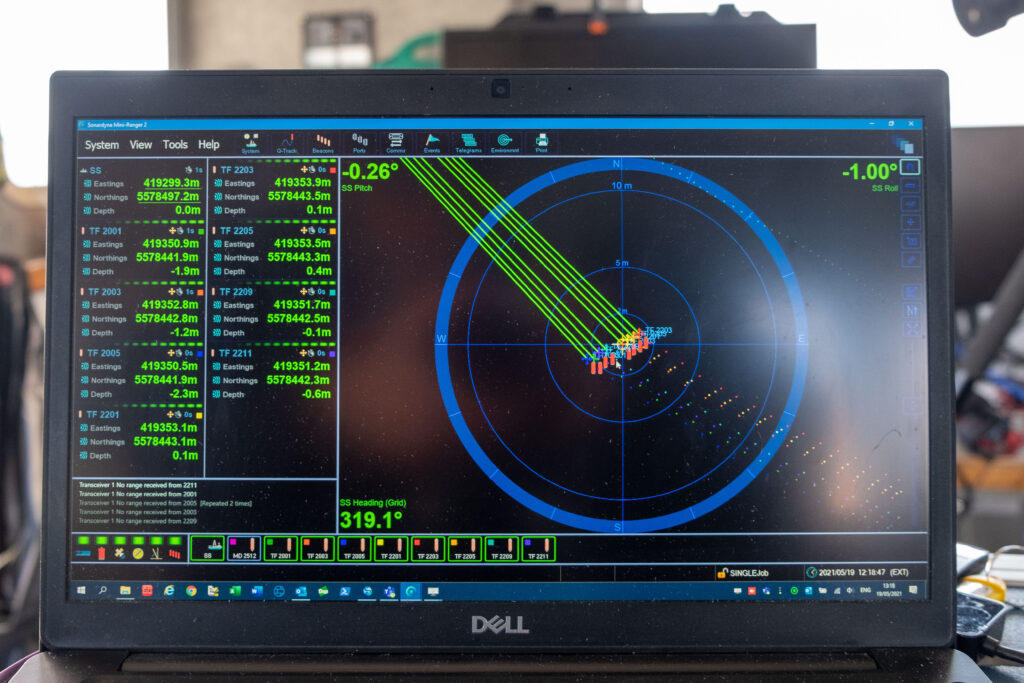
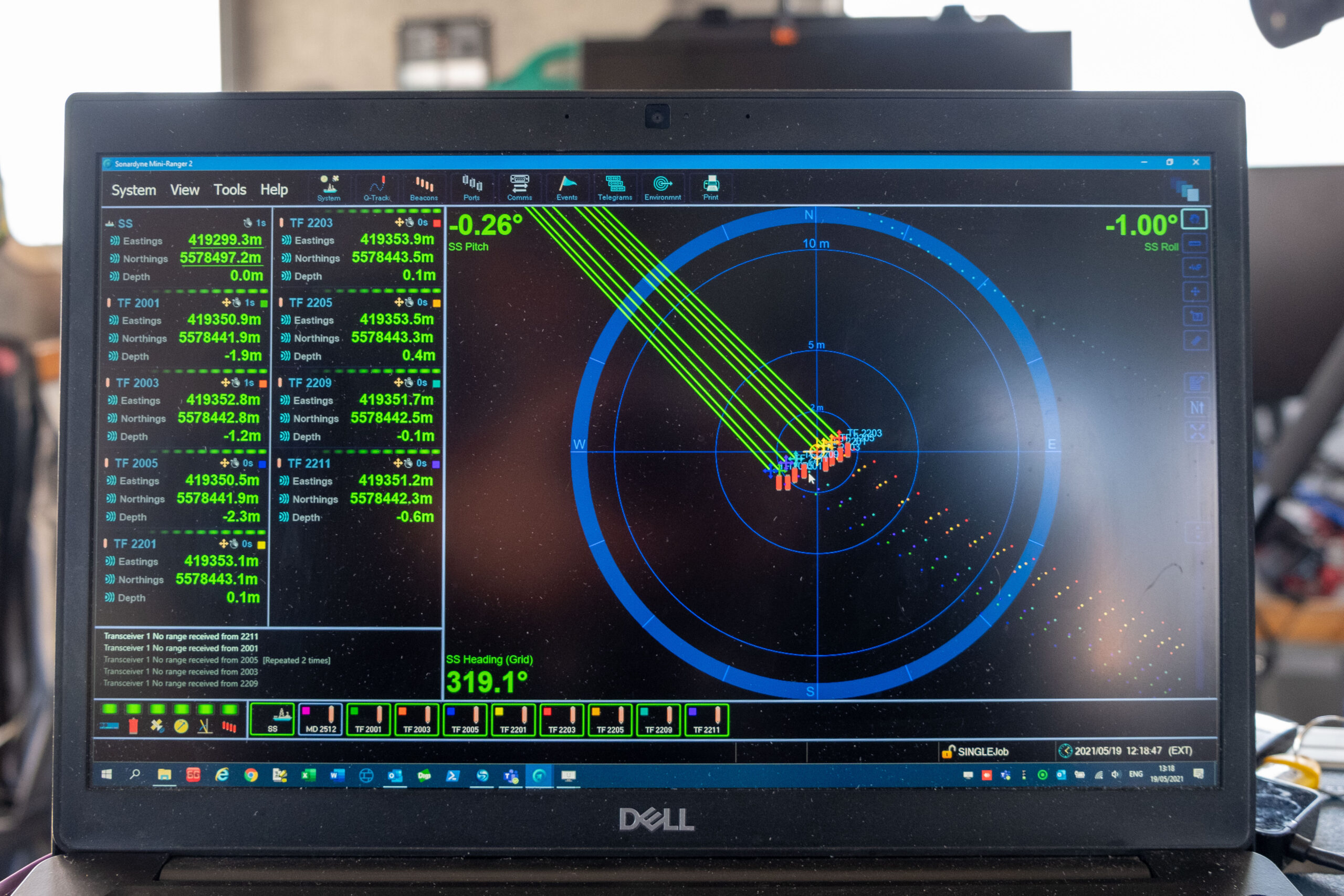
Recovery of the wreck offered a great opportunity to the Fairey Barracuda restoration effort. But, it also posed a number of challenges, not least the water depth – or rather lack of it. Lying in just 5 m, Robin Fidler, who was then Survey Operations Manager at JFMS, expected to encounter acoustic interference problems tracking his divers due to signals bouncing off the seafloor and sea surface – often referred to as multipath.
Multipath can cause a USBL transceiver at the surface to falsely detect (or completely miss) a genuine reply signal from a transponder, leading to unstable tracking performance. Previous generation USBLs were particularly susceptible to multipath and needed careful setup to overcome the problem – not always successfully.















The solution
JFMS chose our Mini-Ranger 2 USBL system for the project. Mini-Ranger 2 is our mid-level USBL target tracking system. It provides shallow water performance without the cost and complexity of a deep water USBL solution. It’s also portable and quick to mobilise; a great choice for small survey vessels, moored barges and uncrewed vessels.
Six divers were used on the three-week project from the Stour jack up barge, with one diver in the water at any one time. The barge itself was fitted with an HPT 3000 transceiver mounted to the side, cabled back to a survey shack where the diving operations were controlled from.
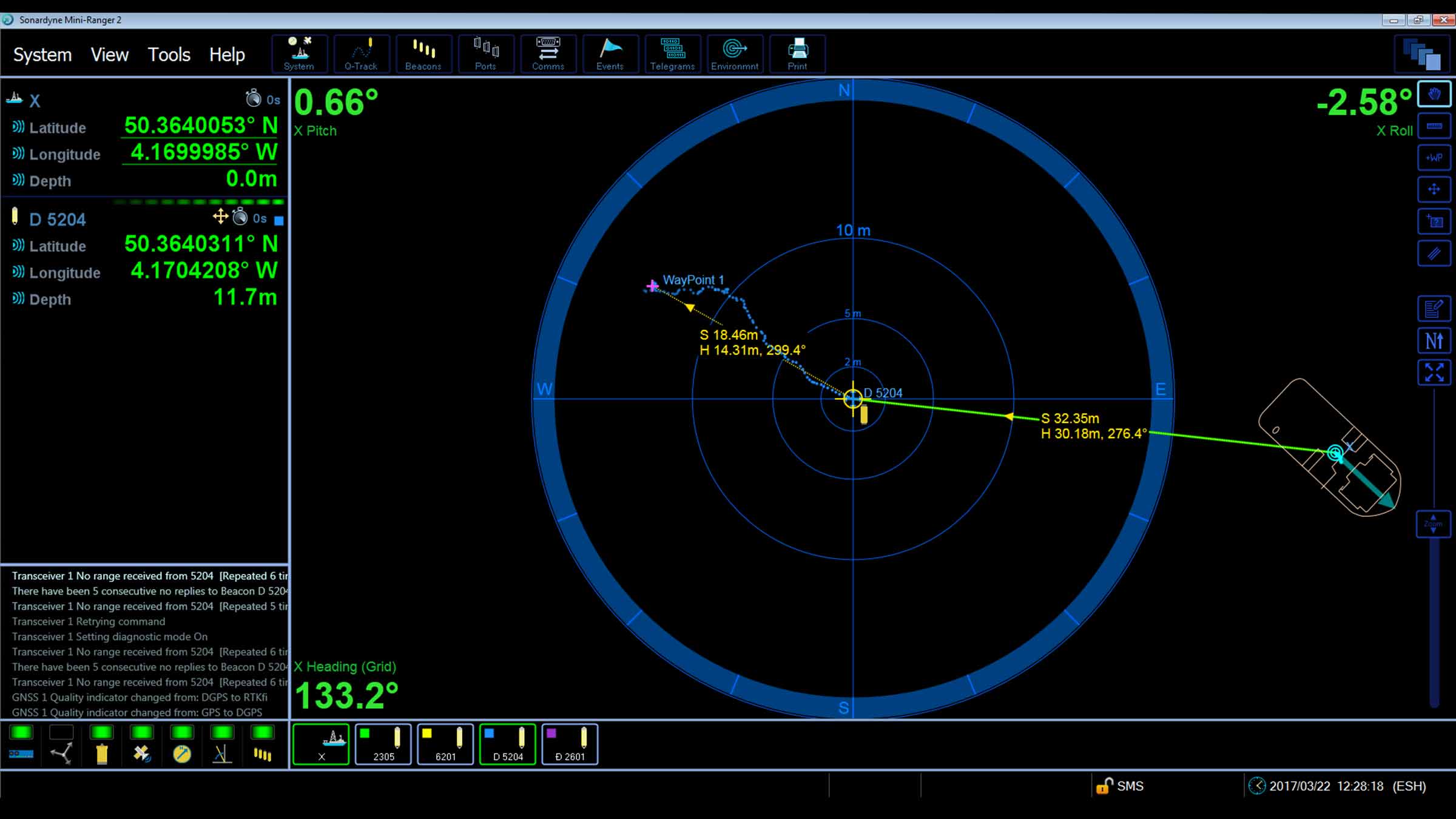
WSM 6+ transponders fitted to each diver’s cylinder enabled the HPT to track every moment of their dive, providing a valuable layer of safety to the operation. Each diver also carried one of our Nano transponders in their pocket, this was used to place directly on top of any archaeological finds, so that precise waypoints for each artefact they discovered could be logged (and individually named) in the Mini-Ranger 2 USBL software. This information is then available for offline analysis.
The Mini-Ranger 2 USBL uses Wideband 2 for digital signal processing, so multipath never became an issue for the recovery operations, regardless of the depth of the tide. This had the additional benefit of freeing up users to deploy our USBLs virtually anywhere.
The results
The crash site was heavily silted so it needed to be cleared away for sections of the aircraft to be lifted out of the water. Artefacts retrieved included one of the pilot’s boots, a boost gauge and the underwing pitot head and mounting bracket – a delicate instrument that was used for recording the aircraft’s airspeed. The fact that this was found intact implies that the Barracuda was almost at stalling speed by the time it reached the water, says Wessex Archaeology’s Senior Project Manager Euan Mc Neill.
“We were really impressed with just how Mini-Ranger 2 operated,” says Fidler. “We thought we were going to have to use a (Fanbeam) laser radar system, tracking a reflective buoy attached to the diver to give us a range and bearing to the diver. We didn’t have to use it once; we could do it all with USBL, no matter what the tide, which made our lives much easier and that’s all we could ask. The USBL didn’t miss a beat. We were up and running with it quickly meaning that we were able to maximise the three week window we had on site.”
Long ROV excursions, high elevation tracking, noisy waters – not a problem
As it stands, underwater positioning is not always easy. But some environments – like shallow waters – are more challenging than others. If you don’t have good subsea positioning accuracy, you won’t have a good baseline or repeatability for comparing new survey data with old.
The challenge
Recently, our long-term customer, CCC, was engaged to carry out subsea pipeline external inspections offshore the United Arab Emirates.
It was a periodic integrity survey of an operator’s pipeline network, some of it dating back to the 1960s and 1970s. The subsea inspection campaign amounts to approximately 2,000 km of pipeline inspection distance, covering 316 pipelines over various offshore fields.
In the past, baseline data could be three metres out – and that was acceptable. Now, more than half a metre is unacceptable and repeatability is key for creating a solid baseline that can be matched for future surveys.
The main challenge for CCC was the shallow water the pipelines are situated in – as little as 5.5 m depth and not more than 30 m. Added to the shallow water complications were the length of the ROV excursions. For safety reasons, their ROV sometimes had to navigate more than 70 – 100m away from the vessel and its transceivers.
When conducting operations in shallow water you inevitably put a lot of man-made noise from engines and the ROV into the water. Surface reflections and high signal to noise, also add to the potential reduction in accuracy of subsea positioning when using a USBL system.
Long ROV excursions can be inclined to become unreliable or erratic simply because of the distance between transponder and transceivers. When combined with shallow waters, further difficulties arise. The distance between the seabed, the transceiver head, the top of the beacon and the angle of the distant vessel’s acoustic transceiver complicates and interferes with the transmission of data.
The solution
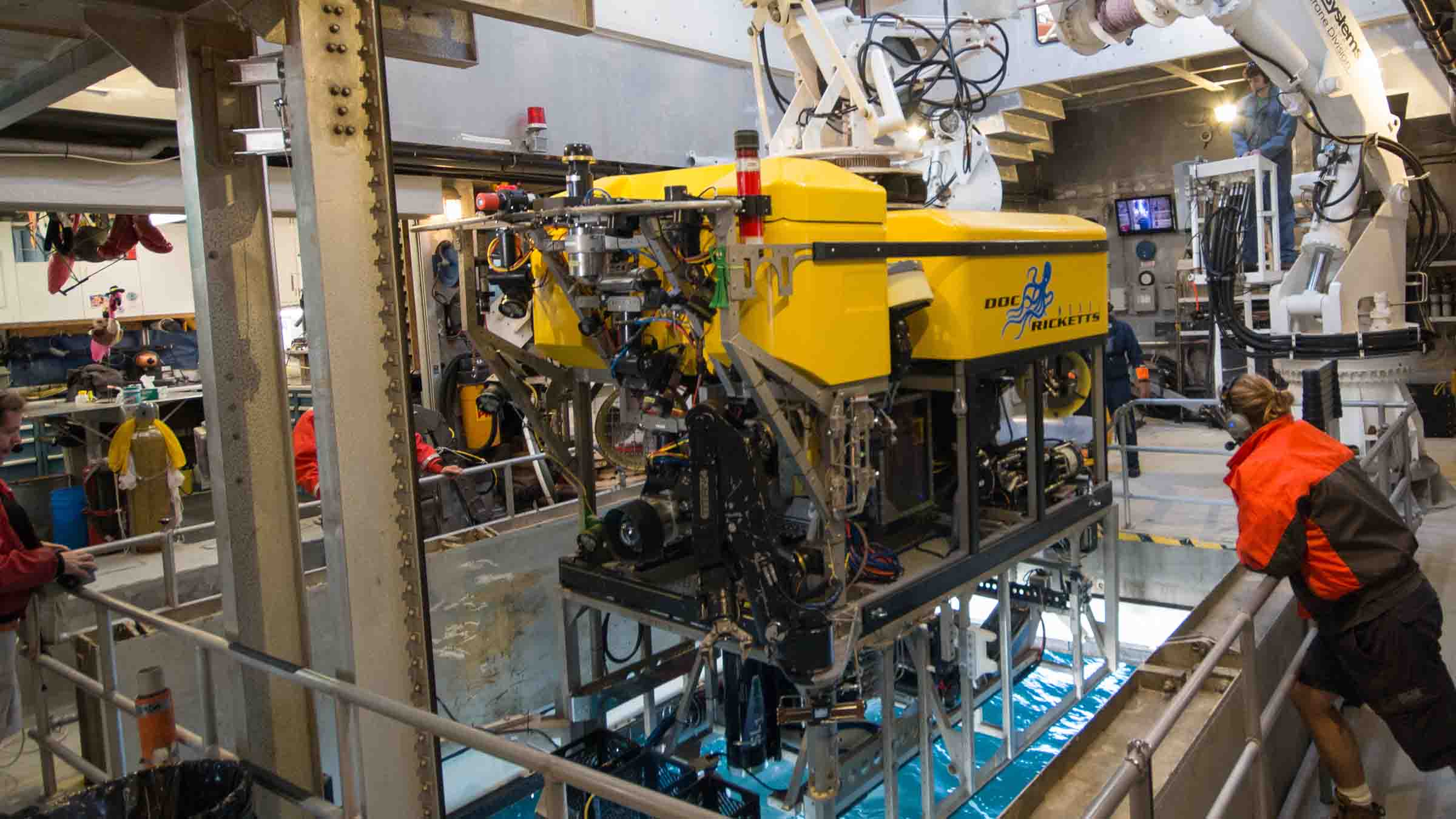
The platform used to undertake the subsea external inspection was the CCC owned and operated Saab Seaeye Leopard 1706 remote operated vehicle (ROV). Fitted with three HD cameras, Valeport bathy suite, mini SVP, CP, UT, laser line generator, MCS PRC system and two Kongsberg M3 profiling sonars. The fully equipped ROV was tracked using our Mini-Ranger 2 Ultra-Short BaseLine (USBL) system from our CCC Maritime 2 multipurpose dive support vessel.
The Ranger 2 Pro USBL system is found on all of CCC’s vessels. Because of the shallowness of the water, CCC decided to use a Mini-Ranger 2, which has a beam plot that suits these needs, and Wideband Sub-Mini 6 Plus (WSM 6+) beacons, which are proven to be reliable when operated in shallow water.
But, they still needed to deal with noise in the water, which could impact their USBL effectiveness. They decided to optimise their USBL. An ROV-mounted gyro and motion sensors were added to help improve the position with pitch, roll, attitude and heading, when the USBL started to jitter. But, because they weren’t fully integrated, it didn’t really do what they needed.
Then, we introduced them to SPRINT-Nav. SPRINT-Nav is an all-in-one navigational instrument, which combines a SPRINT INS sensor, Syrinx 600 kHz Doppler Velocity Log (DVL) and a high accuracy intelligent pressure sensor in a single unit. SPRINT-Nav tightly integrates all the raw sensor data, including individual DVL beams, to provide its high performance.
One of its advantages is, with bottom lock enabled, it doesn’t matter if you lose your USBL. The integrity of the positioning solution is preserved until your next acoustic fix comes in. This had a great advantage for CCC in achieving subsea positioning repeatability and reliability.
With SPRINT-Nav 500 fitted to their Leopard, the shallow water inspections project became far simpler. CCC achieved the best of both worlds – USBL and a high-performance INS. The USBL position is fed to SPRINT-Nav from Mini-Ranger 2 and it outputs a corrected position, based on the information from its INS and the DVL.
The results
When an ROV goes on a long excursion away from their vessel now, it doesn’t matter. If the USBL tracking drops out or if it starts jittering, SPRINT-Nav still knows where it is. The survey and data acquisition team on board the vessel were amazed; straight out of the box, SPRINT-Nav kept the ROV on course.
CCC achieved survey accuracy below half a metre, thanks to the SPRINT-Nav. Excellent positioning and repeatability were obtained, a critical need for quality inspection projects. Furthermore, CCC now has full confidence in the start and end position and doesn’t even require any post-processing.
Micro. For when good is good enough
Describing underwater ecosystems requires detailed information that can be accurately tied to specific locations. The impact of marine pests, litter, marine industries and other issues needs to be tracked over time with confidence. What’s more, the changeable nature of the sea and weather systems in coastal areas means equipment used for the assessment and monitoring of marine life, reef systems and sea fauna must be quick to deploy and simple to set up.
The challenge
Port Phillip Bay is home to a host of unique and iconic marine life and is one of the most diverse places on the planet for seaweeds and reef systems that support a diverse array of sponges and other invertebrates. It’s also shadowed by the city of Melbourne which has a growing population of nearly 5 million people and experiences particularly challenging conditions – the large embayment is exposed to strong winds and has periods of low underwater visibility.
To protect the Bay, the Victorian Department of Environment, Land, Water and Planning (DELWP) is implementing the Port Phillip Bay Environmental Management Plan 2017-2027 (EMP). The team at Fathom Pacific Pty Ltd have been tasked with carrying out studies and surveys in Port Phillip Bay to inform the decisions and recommendations made by the EMP.
To do this they need to create reliable models and maps, along with reports detailing the bay’s marine biotopes – areas that provide habitats for specific species – for the protection of the Bay to be effective. The data gathered has to be quantitative and accurately geo-referenced, and it must be gathered in increasingly cost-efficient ways.








The solution
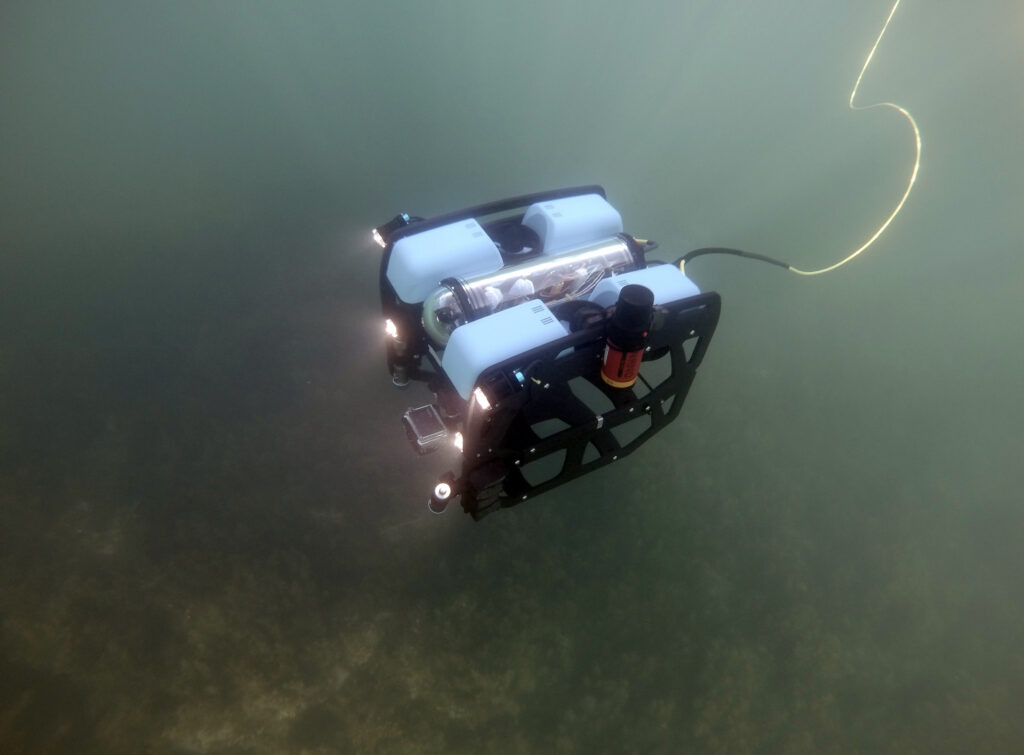
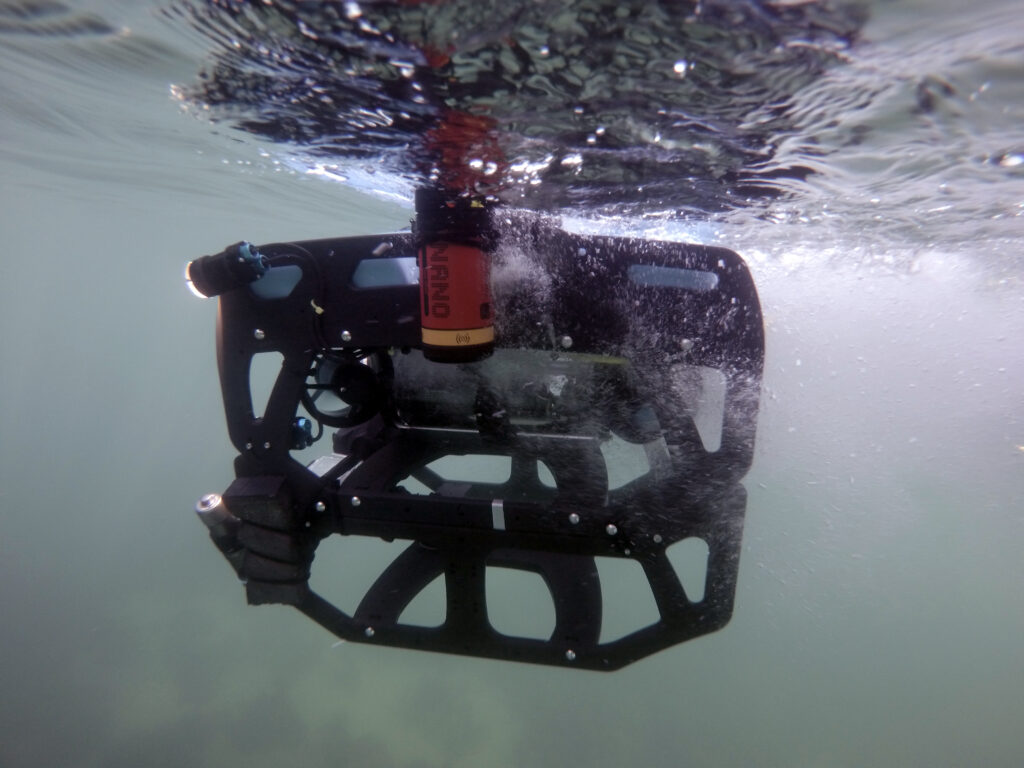
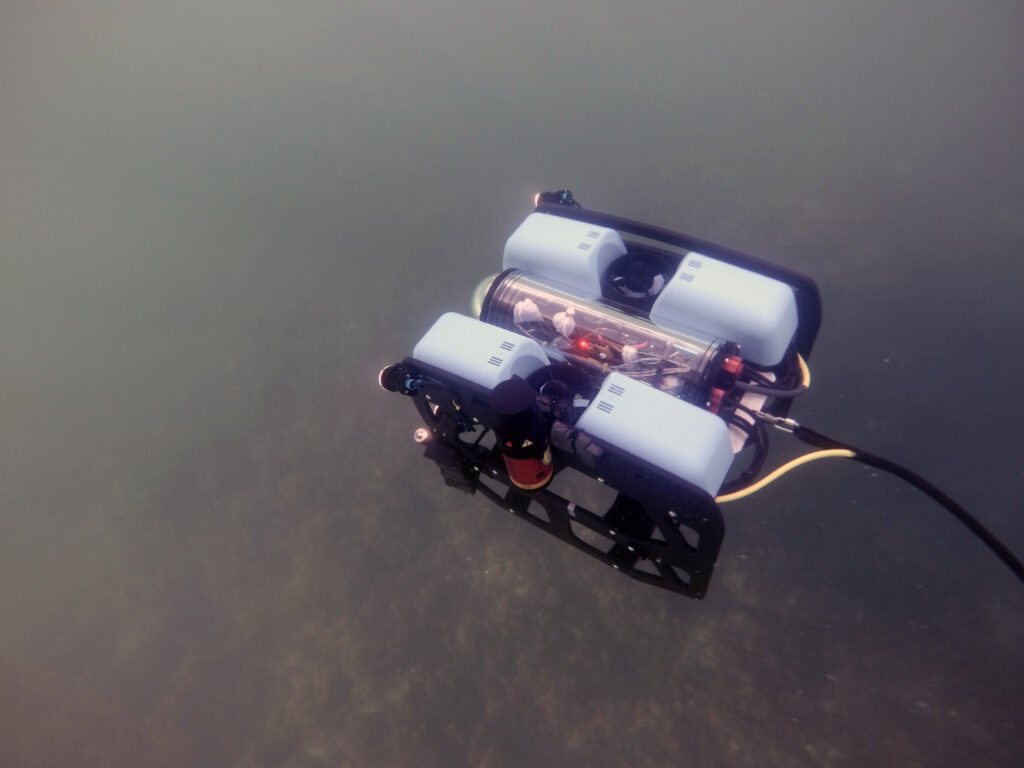
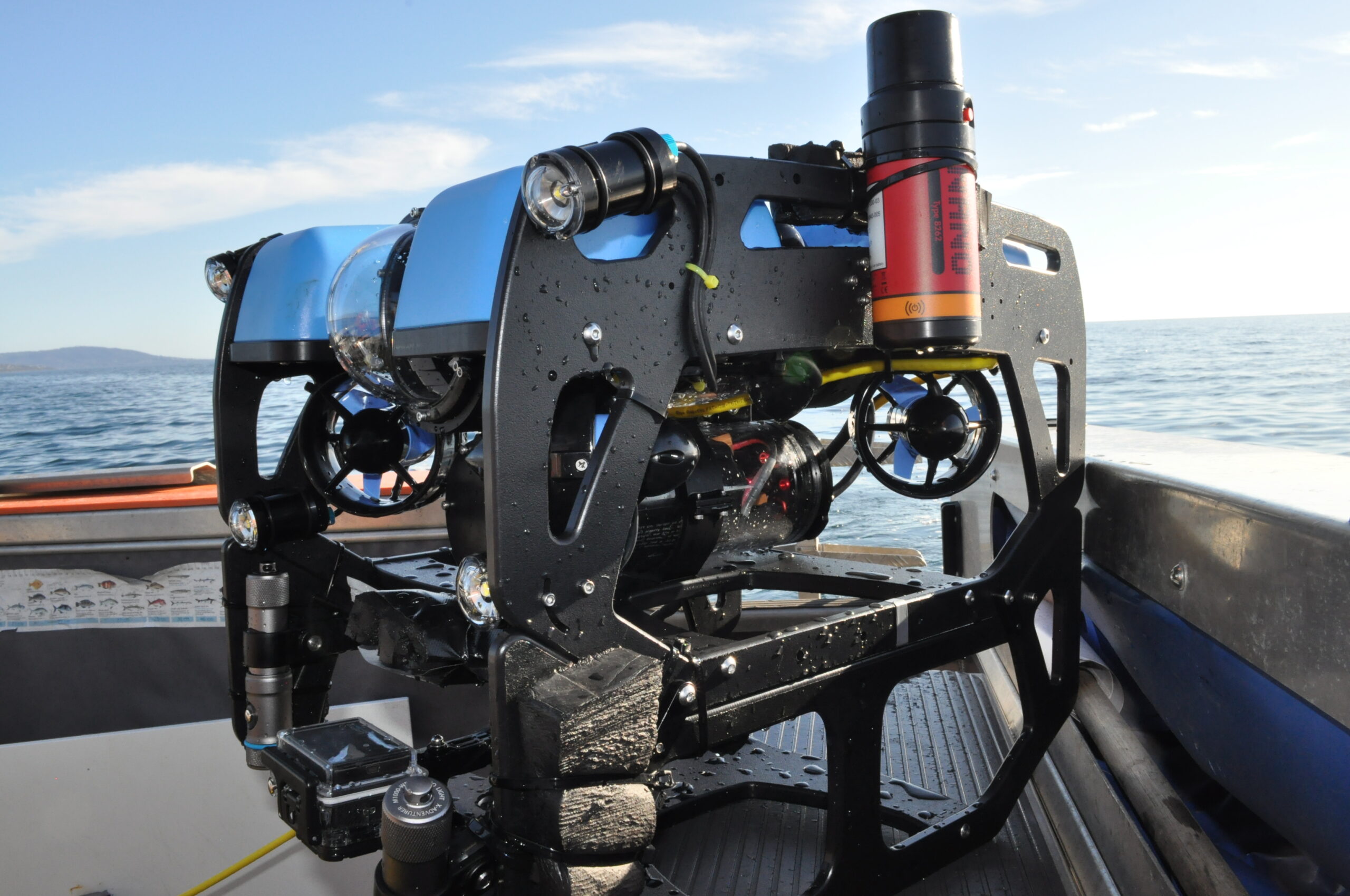
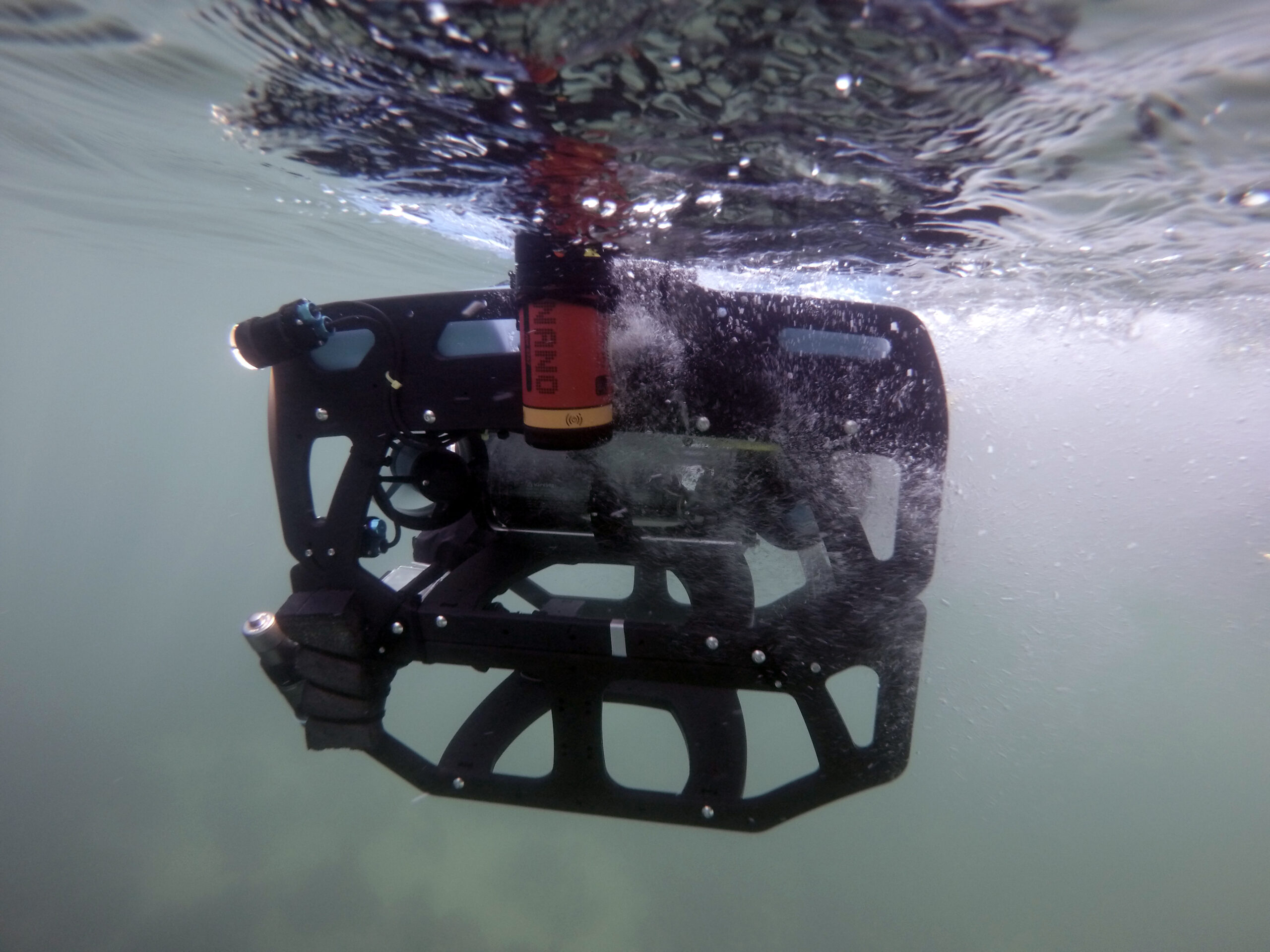
Firsthand ecological research and environmental monitoring are key building blocks of the models and maps needed for supporting the EMP decisions. The BlueROV2 remotely operated vehicle (ROV) from Blue Robotics and a Micro-Ranger 2 USBL from Sonardyne have enabled Fathom Pacific Ltd to capture incredibly detailed HD imagery from the camera they’ve mounted on it. Importantly, the USBL tells them exactly where it was recorded. If divers and other assets are in the water, it can track them as well.
The Micro-Ranger 2 is extremely portable and easy to mobilise making it the ideal solution for small-boat coastal operations and short-notice surveys.
The MRT – the part of the system that communicates with transponders fitted to underwater targets – is so small and light, it has been mounted to the bottom of the stern diver ladder. The range and coverage of the transponder is impressive. Equally impressive are the Nano transponders, these can be strapped to the frame of the ROV or a diver’s tank without affecting balance or freedom of movement. The rechargeable battery lasts for a full day of operations.
Thanks to the instructional videos available on YouTube, the whole system was simple to install and calibrate. Once the software was set up and tested on the laptop, it was put straight to work supporting surveys throughout last winter and spring. The whole set up was often mobilised at very short notice, due to the unpredictable weather windows experienced in Port Phillip Bay.
The Micro-Ranger 2 system has accurately and consistently tracked the BlueROV2 in the bay’s shallow waters, even when it has been transecting some 50-100 m from the small MRT transceiver. This is important for the assessment of the bay’s biotopes during which images of the key structural and functional components of temperate reef and sediment biotopes are taken using the ROV mounted HD camera.
ROV transects typically operate in two modes. The first is a ‘video inspection mode’, detailing the canopy, sub-canopy, lower strata and turfing components and identifying the associated macrofaunal biodiversity. The second is a ‘still image mosaicking mode’, where fixed-altitude planar stills are taken to create biotope mosaics.
Using Micro-Ranger 2, Fathom Pacific Ltd were also able to place their analyses of reef biodiversity and biotopes into a spatial context by correlating the imagery data with real world coordinates. This means ground-truth data for biotope modelling can be provided, while also establishing biotope conditions and informing ecosystem models. Exactly the same locations can be visited time and again for future surveys.
The results
The investment in Sonardyne’s USBL technology is paying enormous dividends. Better monitoring of the Bay is enabling targeted and faster responses to issues like the spread of marine pests, loss of canopy-forming algae to urchin grazing, biodiversity loss, eutrophication, litter and impacts from marine industries. These are just some of the threats facing Port Phillip Bay’s marine systems that are now being curtailed.
Speak with one of our experts to learn how you can protect coastal environments with Sonardyne’s technology.
Seabed-to-desk data harvesting with HydroSurv
Combining uncrewed surface vessels (USVs) and cloud services can help offshore wind farm developers and operators collect and act on ocean data faster and more efficiently. Learn how we’re using our expertise to make rapid seabed-to-desk metocean data collection happen with USV innovator HydroSurv.
The challenge
Offshore renewable energy projects need data throughout their lifespans to support proper design, installation, operation, and maintenance*. This includes bathymetry and geotechnical data, but also metocean data, such as current, wave and sea height characteristics.
Water current profiles, for example, are needed to help locate turbine foundations, cables and cable landfalls. During the life of a project, operators need to understand what’s happening in the water column and at the seabed, to prevent downtime, ensure safe and efficient operations and understand fatigue life.
As wind farms start to be built in deeper waters, ocean data becomes even more critical, as conditions become more complex and especially where floating platforms will be deployed. Water current, height and direction are all critical, for planning and operations.
Traditionally, much of this data is gathered using seabed sensors, such as acoustic Doppler current profilers (ADCPs) and pressure sensors, and conventional crewed vessels. However, when accurate spatial and temporal data is required, this isn’t always efficient. The required frequency of site visits to gain sufficient data increase risk and cost, especially when sites are further from shore. Because of this, there is growing demand for remote, lower cost and emissions survey and data harvesting solutions that help reduce downtime and improve yield.




The solution
USVs can visit challenging offshore sites more frequently, at significantly lower cost and with much lower carbon emissions than a crewed vessel.
So, we’ve been working with Exeter-based HydroSurv, an innovator in uncrewed vessel technology, to demonstrate the benefits of USV platforms to provide seabed-to-shore rapid data gathering. This was through a collaborative project, co-funded by Innovate UK through its Robotics for a Safer World: extension project.
HydroSurv’s REAV-40 USV was paired with our intelligent seafloor and vessel-mounted instruments, alongside satellite communications and cloud-based services, to provide an end-to-end seabed-data-to-shore service.
That included our Mini-Ranger 2 Ultra-Short BaseLine (USBL) acoustic positioning system, which is popular for use on mid-size USVs. That’s because it provides USVs with an easy to install and use capability to position, track, communicate with and health check and configure/reconfigure mobile and seafloor-based instruments. It’s the link from the seabed to the surface! Like all Sonardyne hardware, it uses Sonardyne’s 6G Wideband spread-spectrum digital signal processing to communicate, track and position any 6G-enabled instruments.
The REAV-40 also had our SPRINT-Nav hybrid acoustic-INS navigation instrument onboard. SPRINT-Nav provides USVs with navigational redundancy, helping them to ride out drops in GNSS signals, which can be a challenge in wind farms and near built up areas or large structures. This also helps to improve multibeam echosounder data gathering, but it can also support station keeping.
The result
This project demonstrated the application of HydroSurv’s USV and Sonardyne’s acoustic communications technology for rapid environmental data collection to Blue Gem Wind, Simply Blue Group and Offshore Wind Consultants (OWC) focusing on the Valorous floating offshore wind project. The demonstration took place in the Celtic Sea.
Using the REAV-40 and our instruments, HydroSurv streamed a live, online demonstration of data harvesting from underwater instruments, straight to a cloud portal to Blue Gem Wind, Simply Blue Group and OWC audiences in multiple locations.
The integration demonstrated real-world capability of USVs, as platforms for integrated systems and sensors, to execute near-real-time critical data harvesting campaigns safely and cost-efficiently for the offshore sector. With our instruments, combined with cloud-based services, they were able to provide near real-time seabed data-to-desk capability, bringing data and value to the customer.
HydroSurv is now making Mini-Ranger 2 and SPRINT-Nav Mini integration available for customers to specify for turnkey integration into its USV platforms.
*Read DNV’s Metocean Characterization Recommended Practices for U.S. Offshore Wind Energy or IMAREST’s Metocean Procedures Guide for Offshore Renewables.
Straight out of the box navigational enhancement for offshore out of straightness surveys
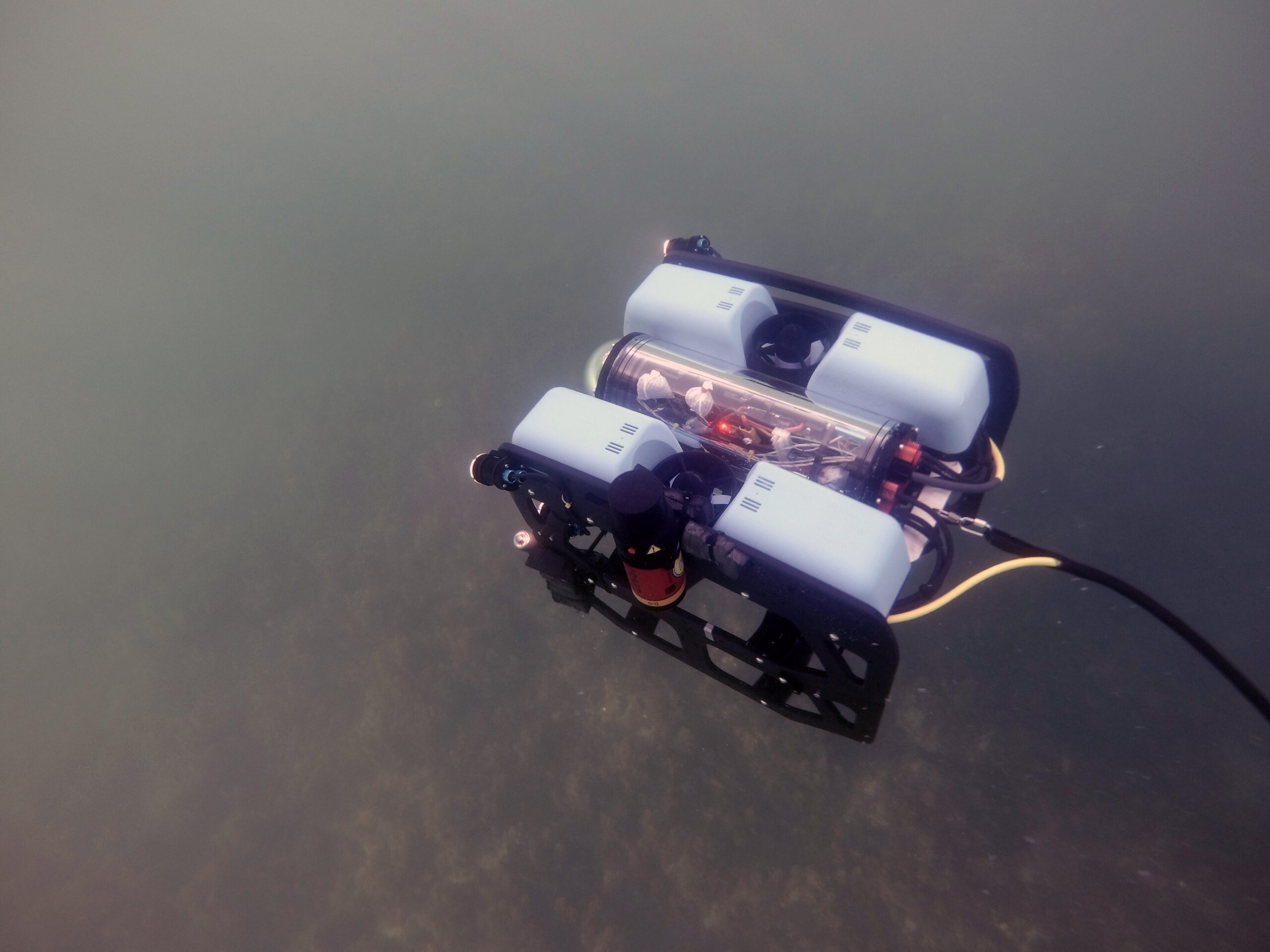
Fugro are already delivering safer, faster and more sustainable offshore operations – as you may have read in our previous case study about the Mini-Ranger 2 USBL system being used to support ROV operations from a USV. Working with us, Fugro are continuing their pioneering remote operations with their fleet of uncrewed surface vessels (USVs) deploying remotely operated vehicles (ROVs) – changing the game for offshore infrastructure surveys. Read on to see how our SPRINT-Nav Mini is being used to enhance multibeam echosounder (MBES) on Fugro’s remote operations, providing incredible results.
The challenge
Out of straightness (OOS) surveys are used for acquiring information about the vertical and horizontal configuration of offshore pipelines. They provide operators with information on the presence or otherwise of buckles and bending in a pipeline, which may be engineered or not, and require monitoring during the operational life of the pipeline or flowline asset.
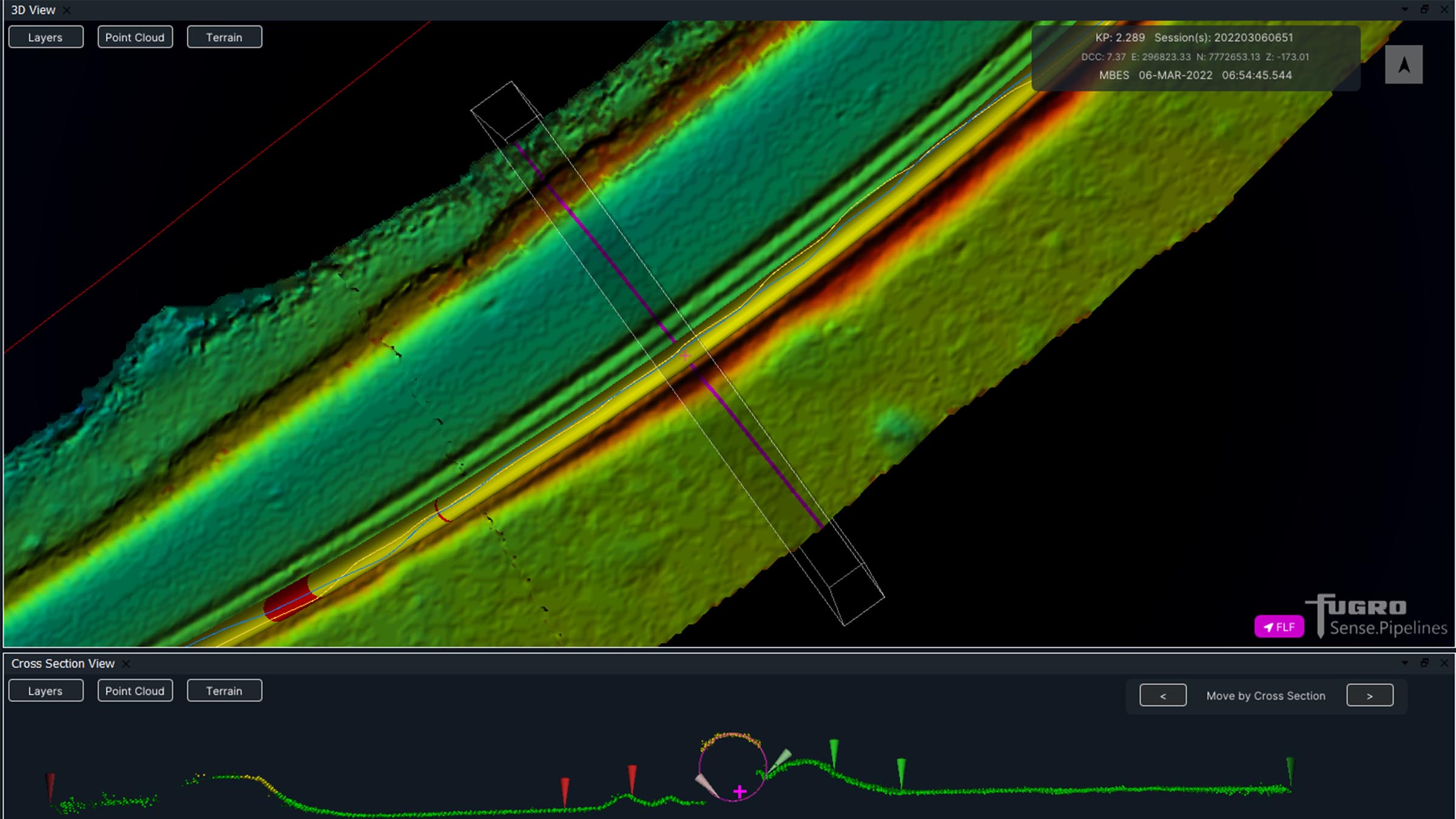
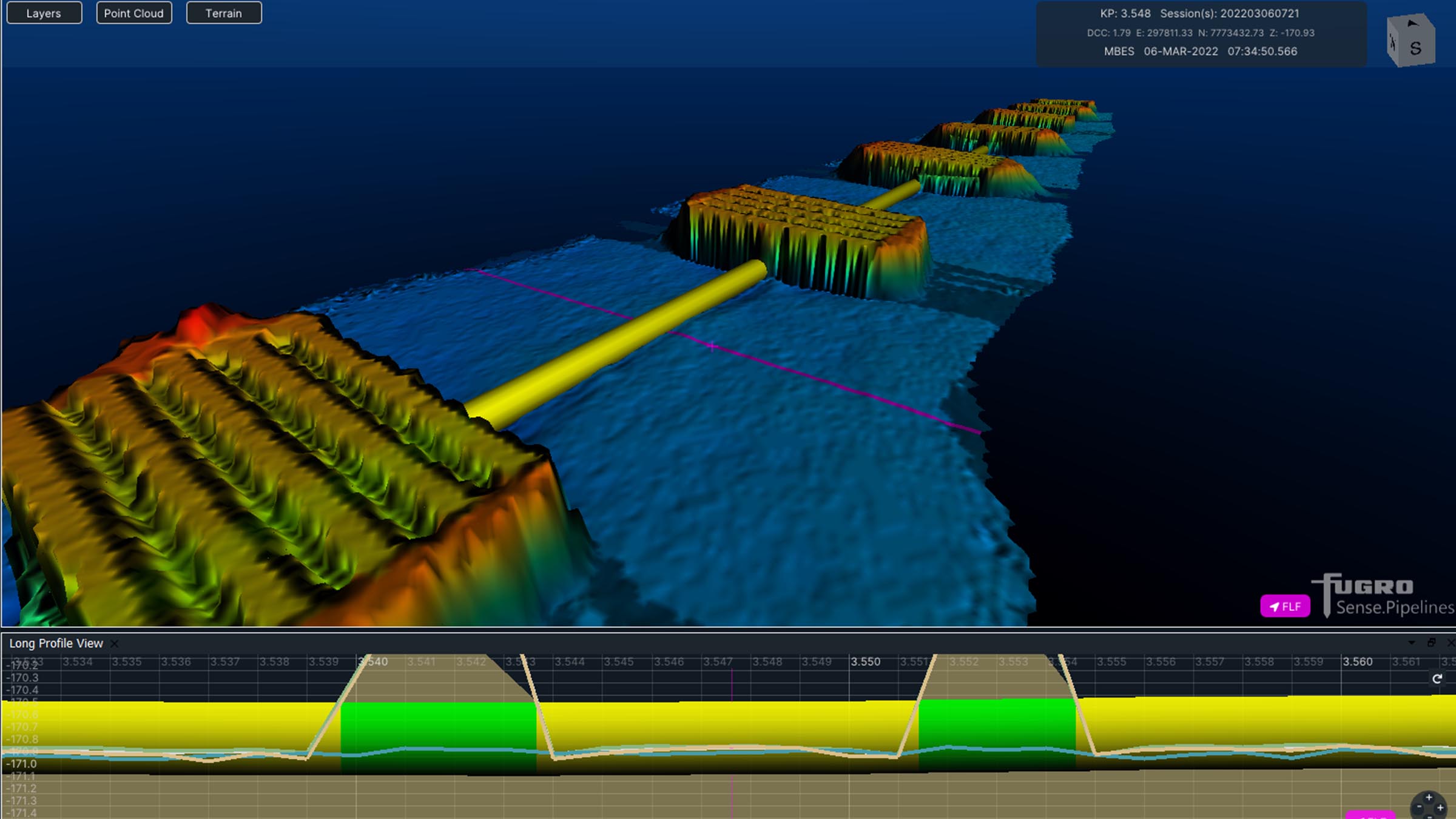
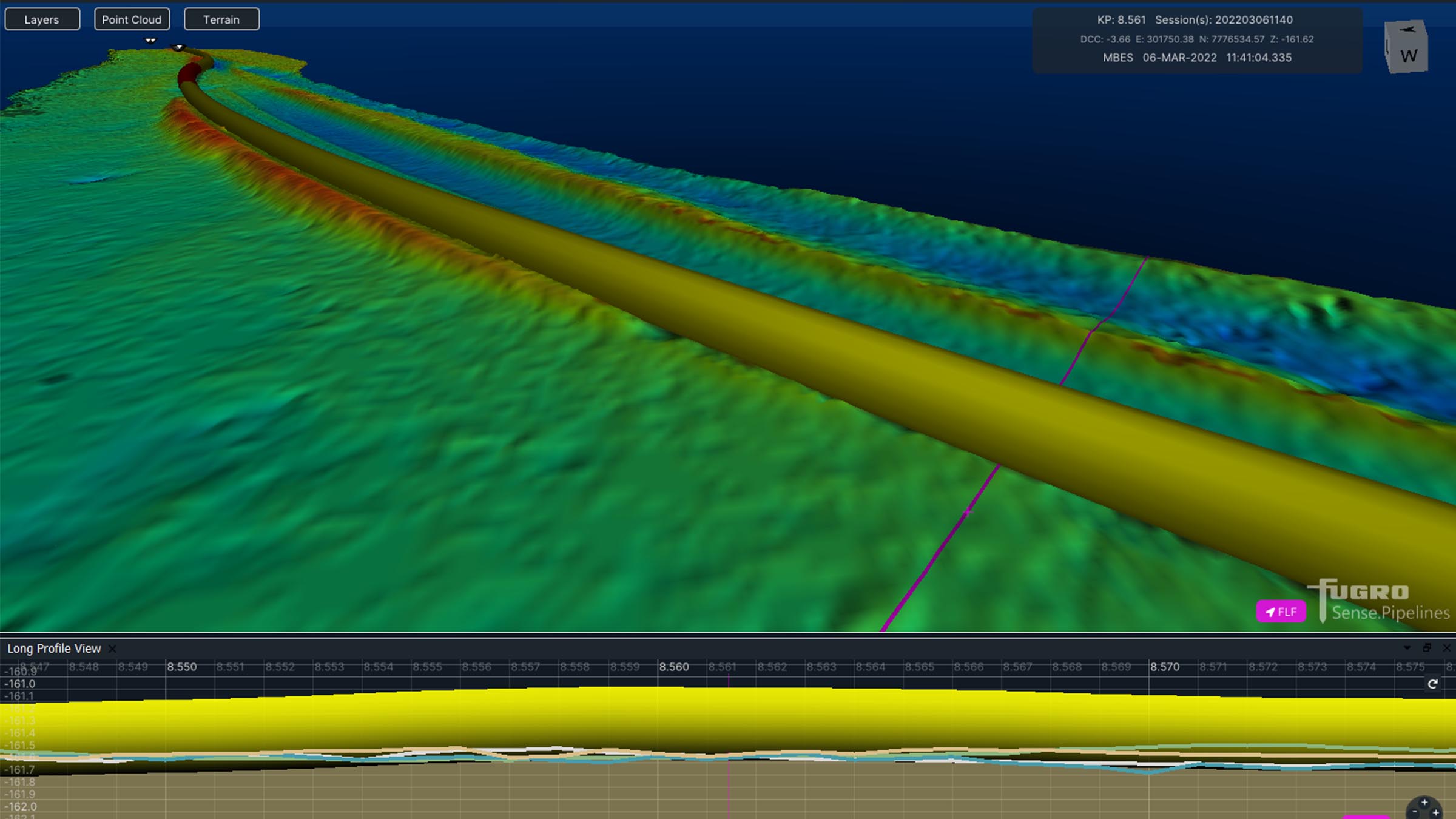
Fugro have been conducting OOS surveys on pipelines for major energy companies in Australia for many years. These surveys were conducted using a Norbit WBMS Narrow Multibeam echo sounder mounted on a Fugro inspection class ROV deployed from Fugro’s 12m Blue Essence® USVs, Maali and Kwilena.
ROV missions along pipelines can be erratic and unreliable due to the distance between the transceiver (USV) and transponder (ROV) when using just USBL positioning. For Fugro’s OOS survey customers, highly accurate data is essential. This has led to their requirement for the highest accuracy navigation and imaging available to the small ROV.
Fugro set us the challenge to provide a navigation solution that would enable the customer requirements of high-quality data using a small ROV. We worked with Fugro to trial SPRINT-Nav Mini and demonstrate the capabilities of the system.
The solution
SPRINT-Nav Mini is the world’s smallest hybrid navigator, combining INS, DVL, AHRS and a pressure sensor in one factory calibrated unit. SPRINT-Nav Mini’s true north seeking gyrocompass means that it delivers reliable surface and subsea navigation. Adding this navigation capability to any marine robotic system allows users more control and turns their vehicles into far more accurate inspection and survey platforms.
With everything you need for navigation packed into a single low Size, Weight and Power (SWaP) package, SPRINT-Nav Mini is simple to integrate into any marine vehicle along with other payload sensors, like Fugro’s MBES. Its impressive precision of 0.05% of distance travelled accuracy on a typical survey alongside our revised heading, pitch and roll specification means that advanced mapping is now possible on smaller platforms deployed from USVs.
“SPRINT-Nav Mini is becoming increasingly vital for geophysical survey operations where SWaP is critical. Users need accurate and high output rate navigation streams for real-time compensation of imaging sensors.” Says John Houlder, INS Product Manager, Sonardyne, “SPRINT-Nav Mini provides robust real-time results that are improved even further once post-processed in our Janus software.”
After demonstrating SPRINT-Nav Mini’s capabilities, Fugro purchased the system and have been deploying it on their inspection ROV, which in turn is deployed from the Blue Essence® USV. With the Fugro team’s input we have been able to revise our specification for SPRINT-Nav Mini, improving its suitability for use with MBES on geophysical survey. These revisions include:
Pitch and Roll: 0.1 to 0.02° RMS
Heading: 0.15 to 0.1° RMS
The results
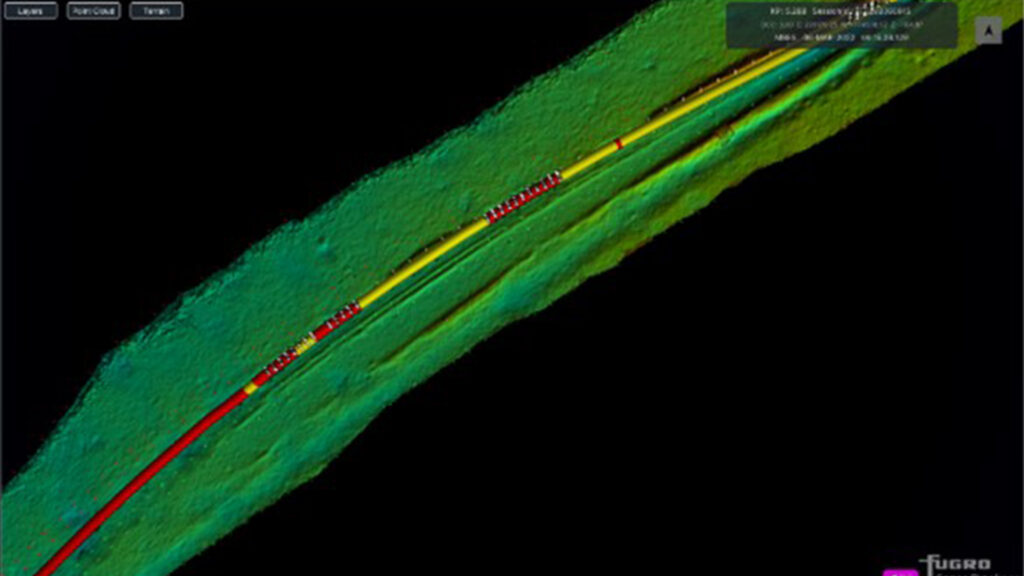
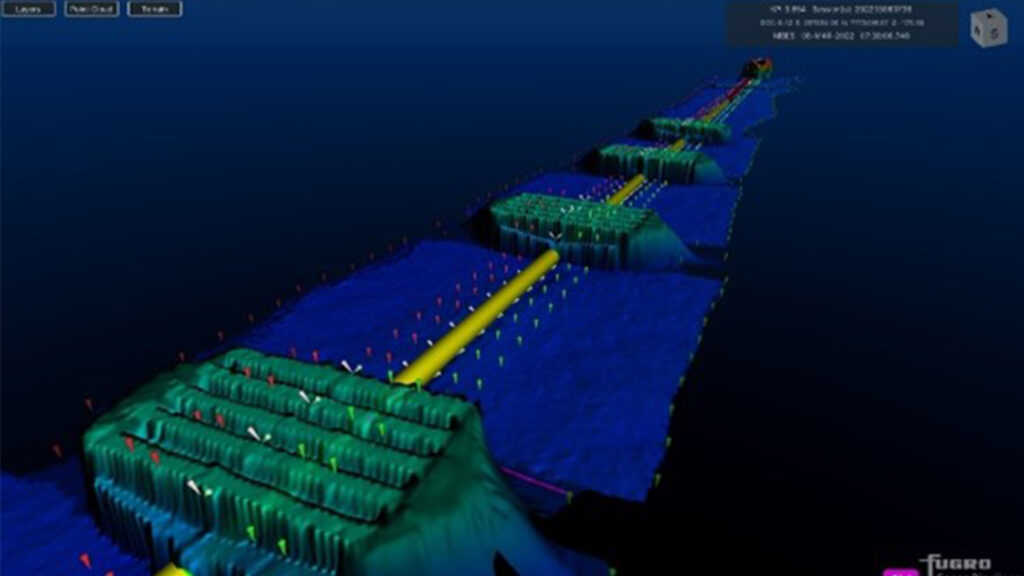
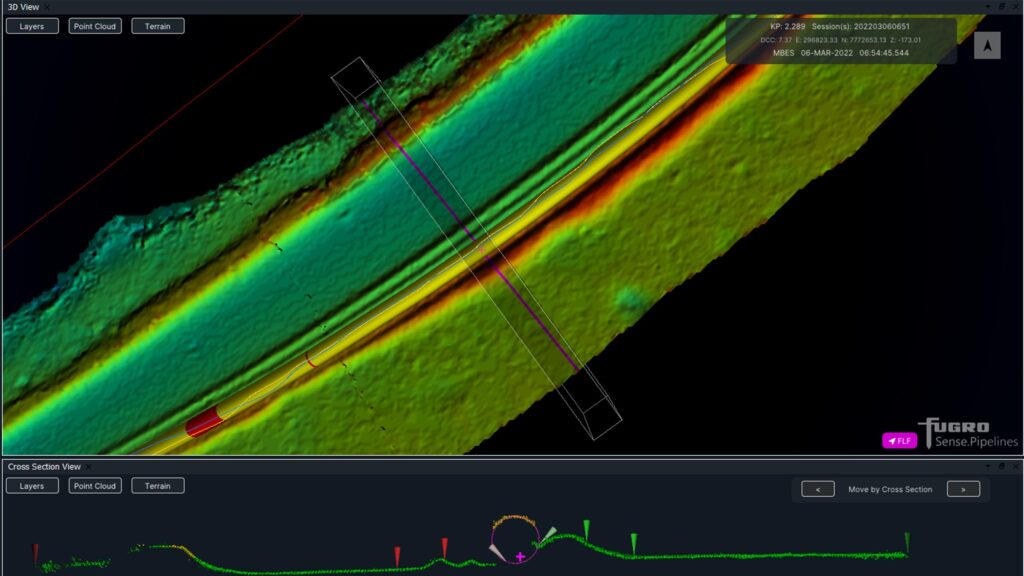
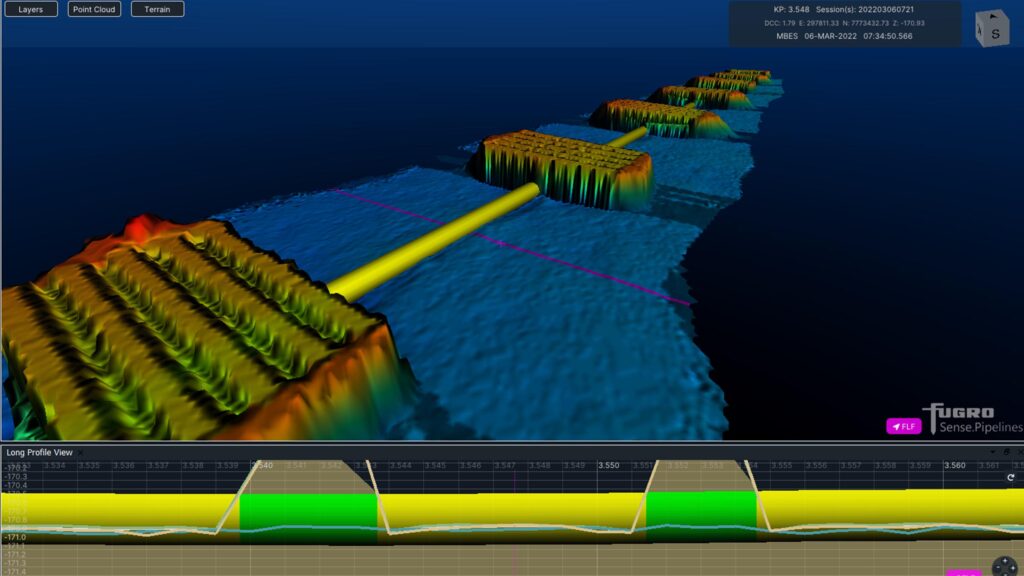
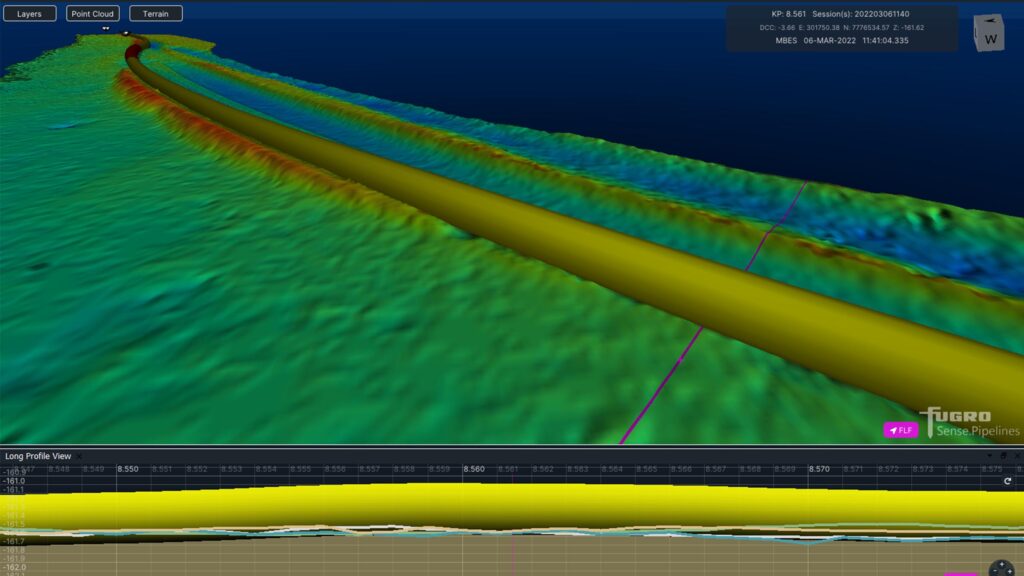
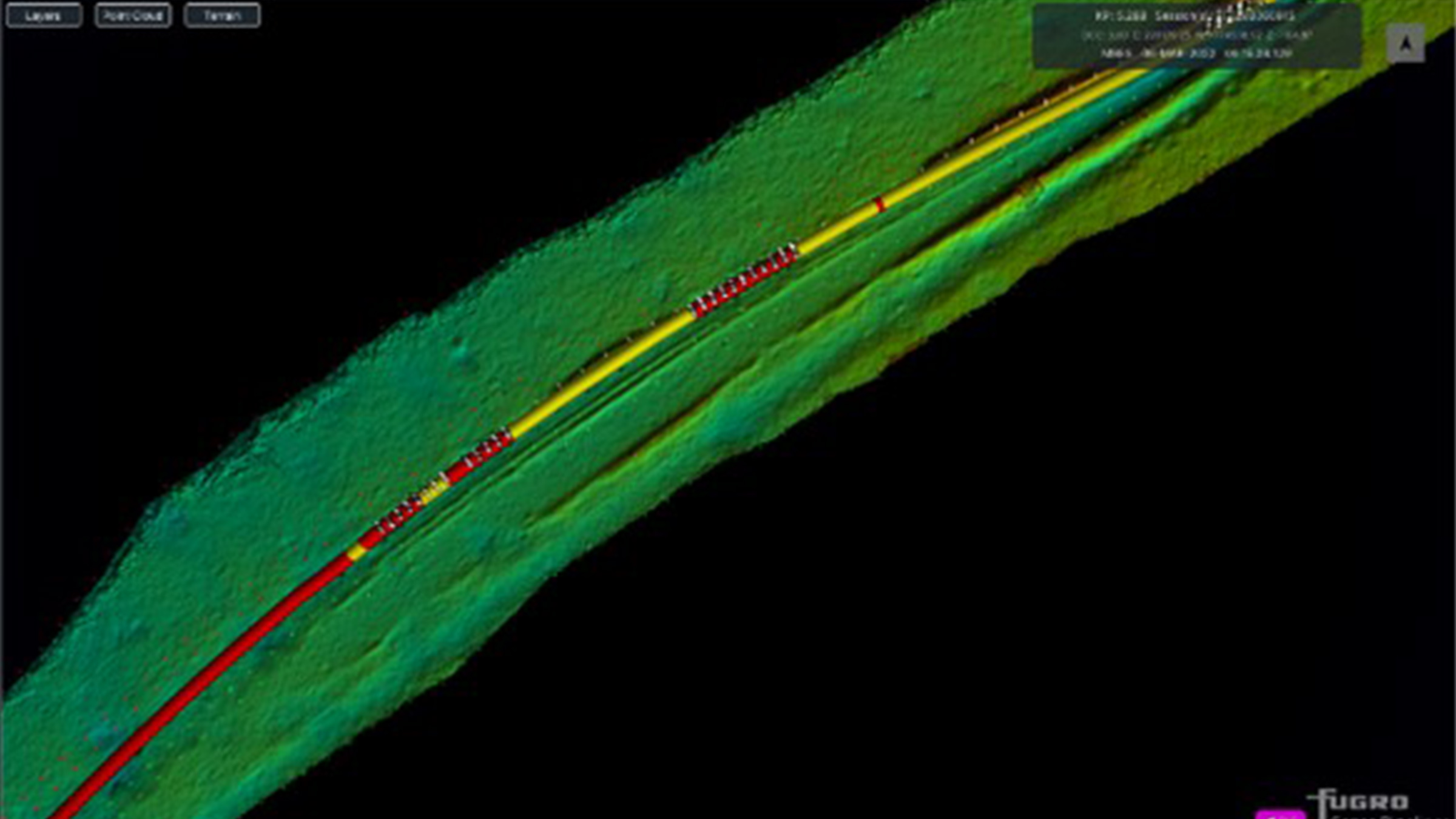
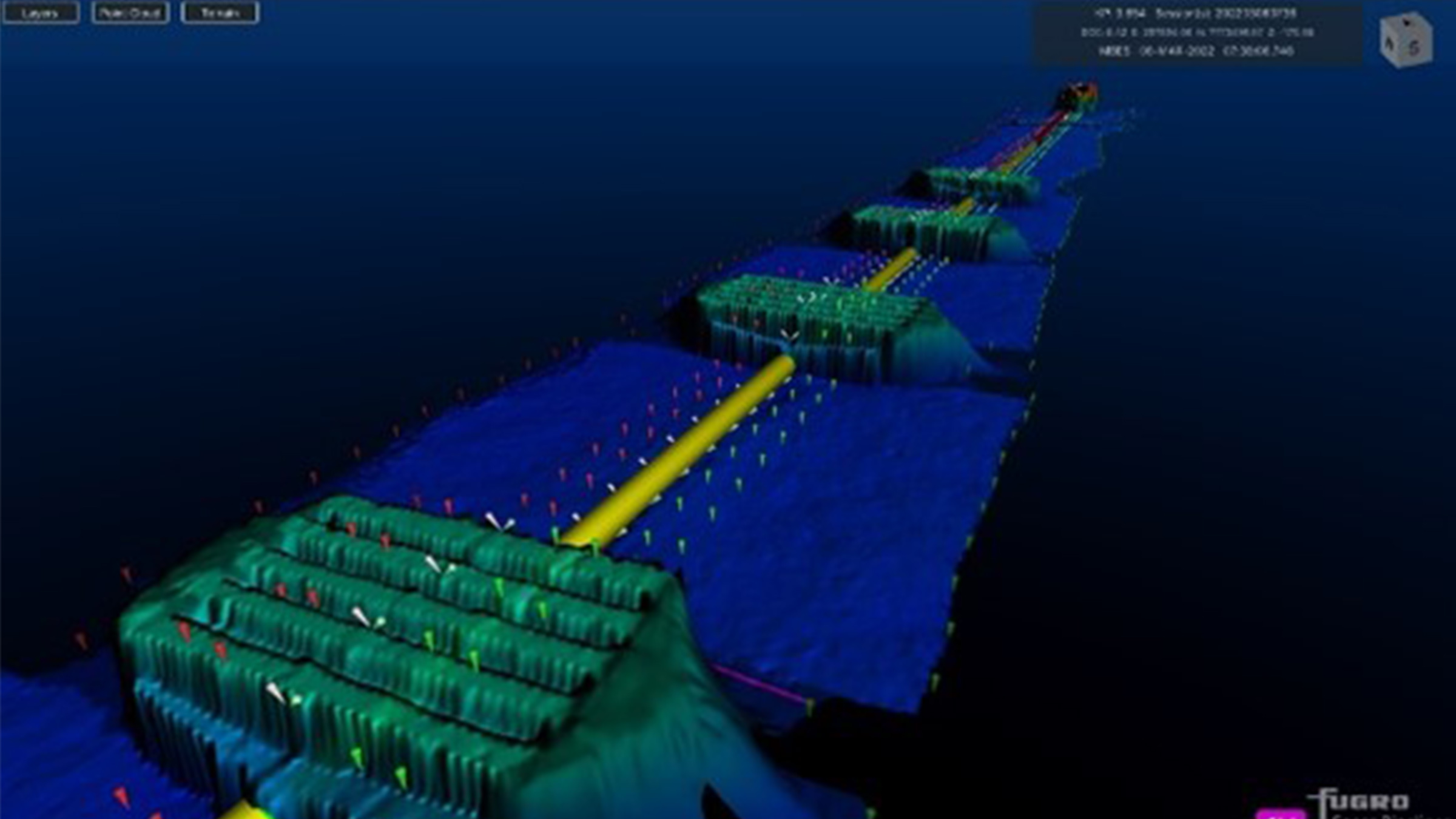
Fugro utilise SPRINT-Nav Mini data within the ROV command and control software, Starfix® navigation, including their Camblock Vision based augmented reality system, and for processing MBES data. In the case of MBES processing, they are also conducting pipeline OOS surveys to a maximum depth of 200 metres.
The images below show some example data Fugro has gathered with MBES positioned using SPRINT-Nav Mini and post processed with our Janus software. Janus is our quality control and INS post processing software. It allows quick and easy data editing, post-processing and data export. Find out more about Janus here
If your offshore operations are also reliant on fast, efficient and accurate data to keep your business competitive in an ever-changing marketplace, take a look at our full range of navigational products here.
Mapping the future for seagrass beds in Plymouth Sound
Seagrass beds are incredibly important ecosystems that offer a range of ecological benefits. Not only do they provide crucial habitats for a diverse array of marine wildlife, especially in coastal areas like Plymouth Sound, they can also store carbon, helping to mitigate the effects of climate change. These underwater meadows serve as nurseries for many species of fish in the early stages of their life, offering them protection and abundant food sources. Additionally, seagrass beds help to stabilise the seabed with their root systems, preventing coastal erosion and maintaining water quality by trapping sediments and nutrients.
However, despite their importance, locating and monitoring seagrass beds using traditional methods, such as survey boats, presents significant challenges. Seagrass typically grows in shallow waters, which can make it difficult for boats to navigate close enough to the shore to obtain accurate data. Traditional survey boats are often large and cumbersome, making them hard to manoeuvre in shallow or rocky areas. This limitation can result in incomplete or inaccurate assessments of seagrass distribution and health.
Furthermore, the process of using boats for surveying can be time-consuming and labour-intensive. It often requires multiple trips and extensive manual labour to map out the seagrass beds accurately. The visibility in shallow waters can also be poor due to water turbidity, further complicating the survey efforts and leading to potential underestimation of seagrass coverage.
Finding a solution…
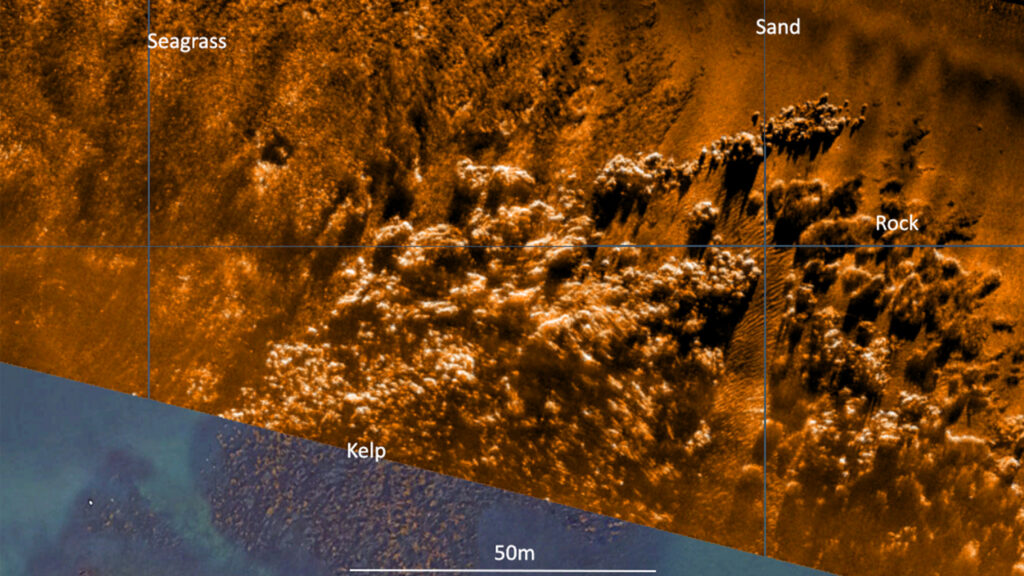
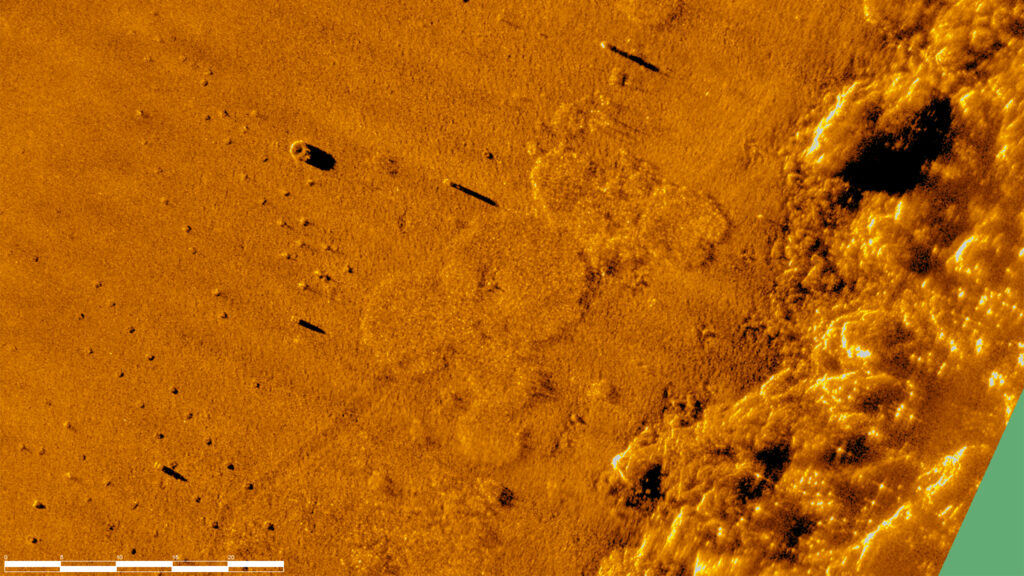
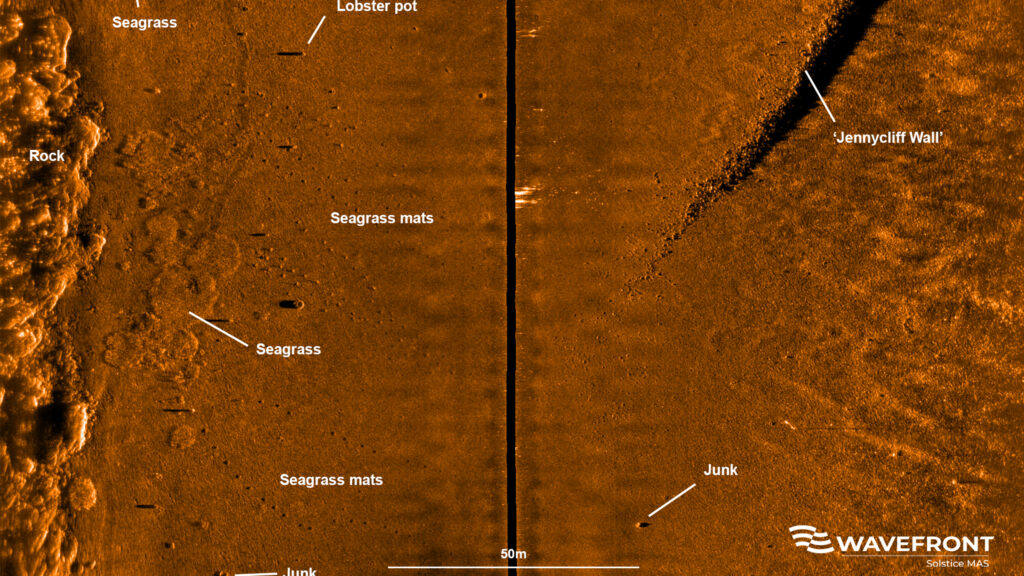
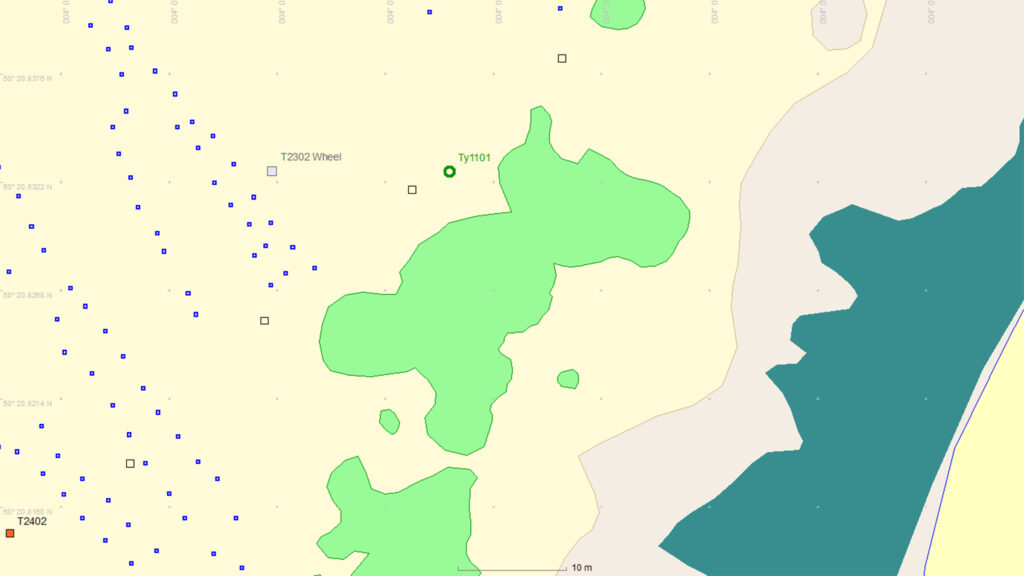
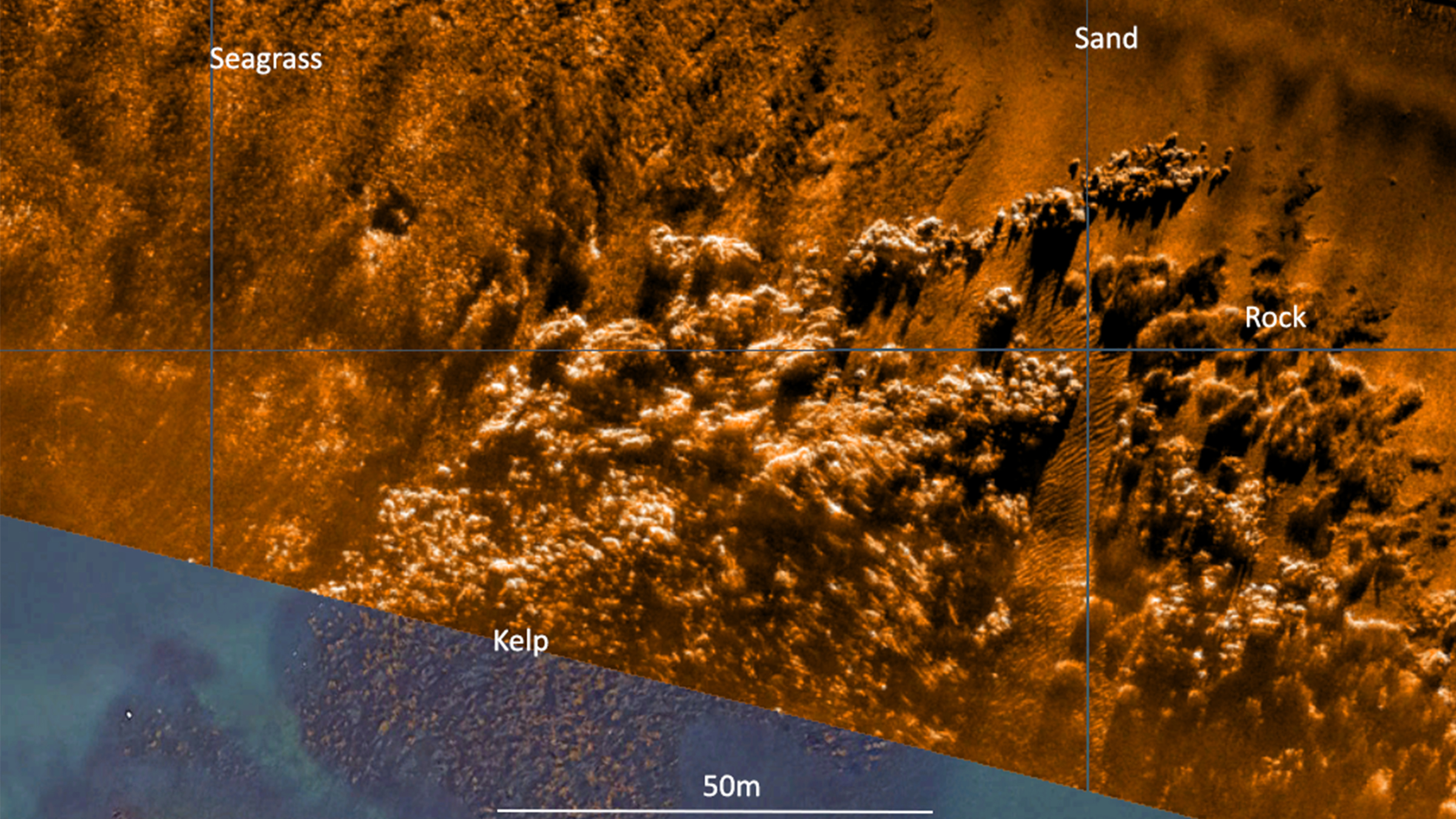
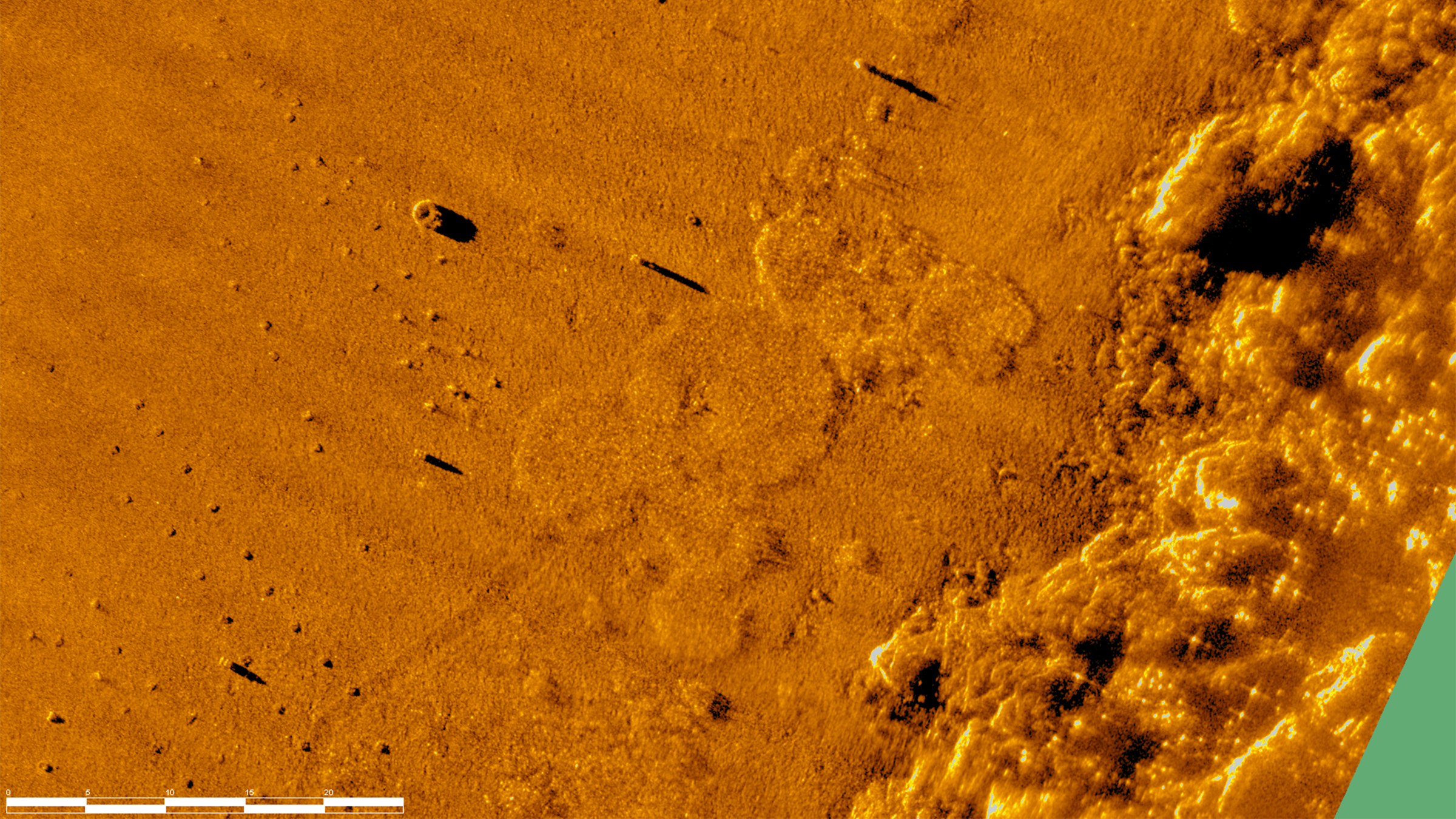
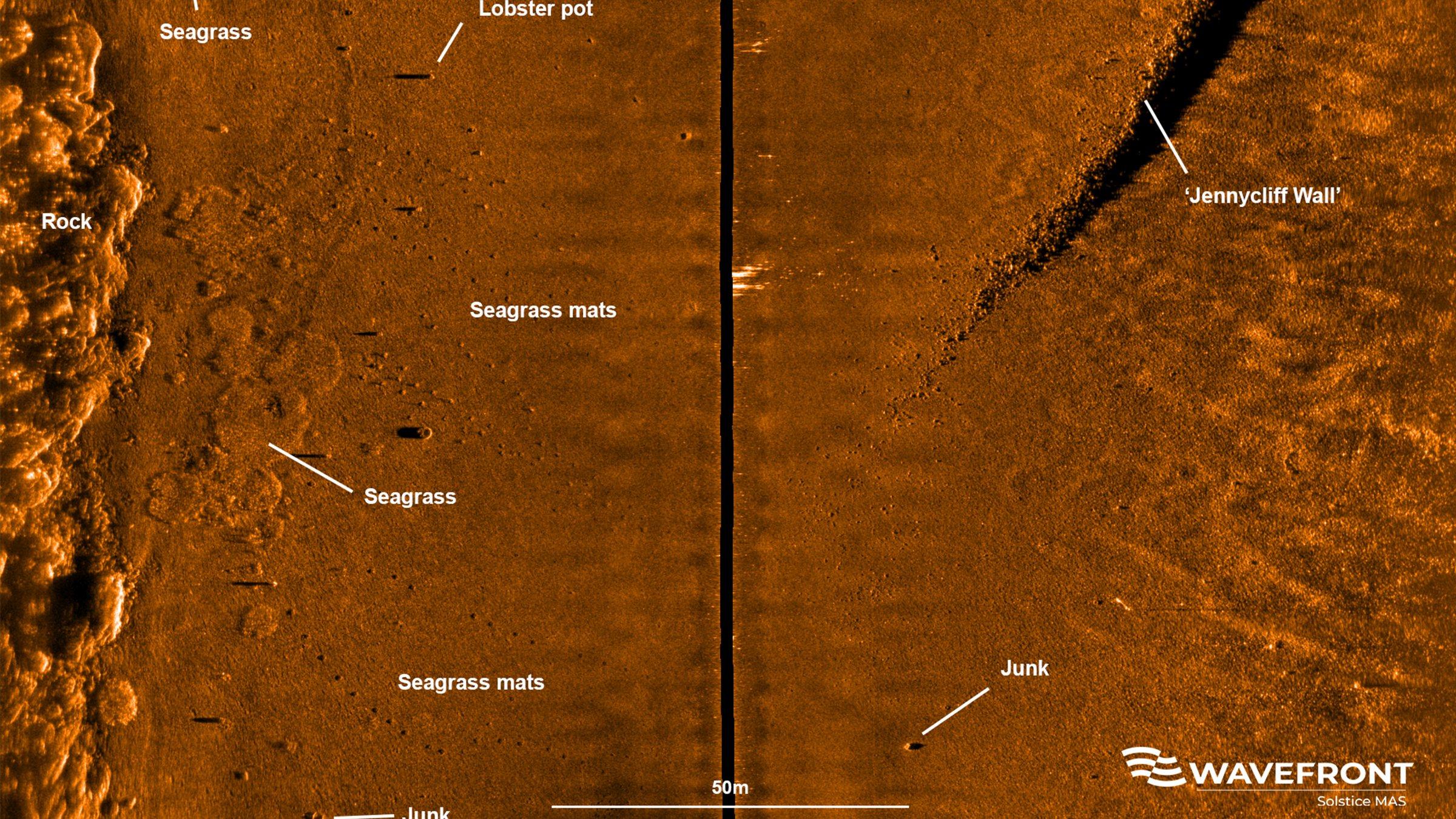
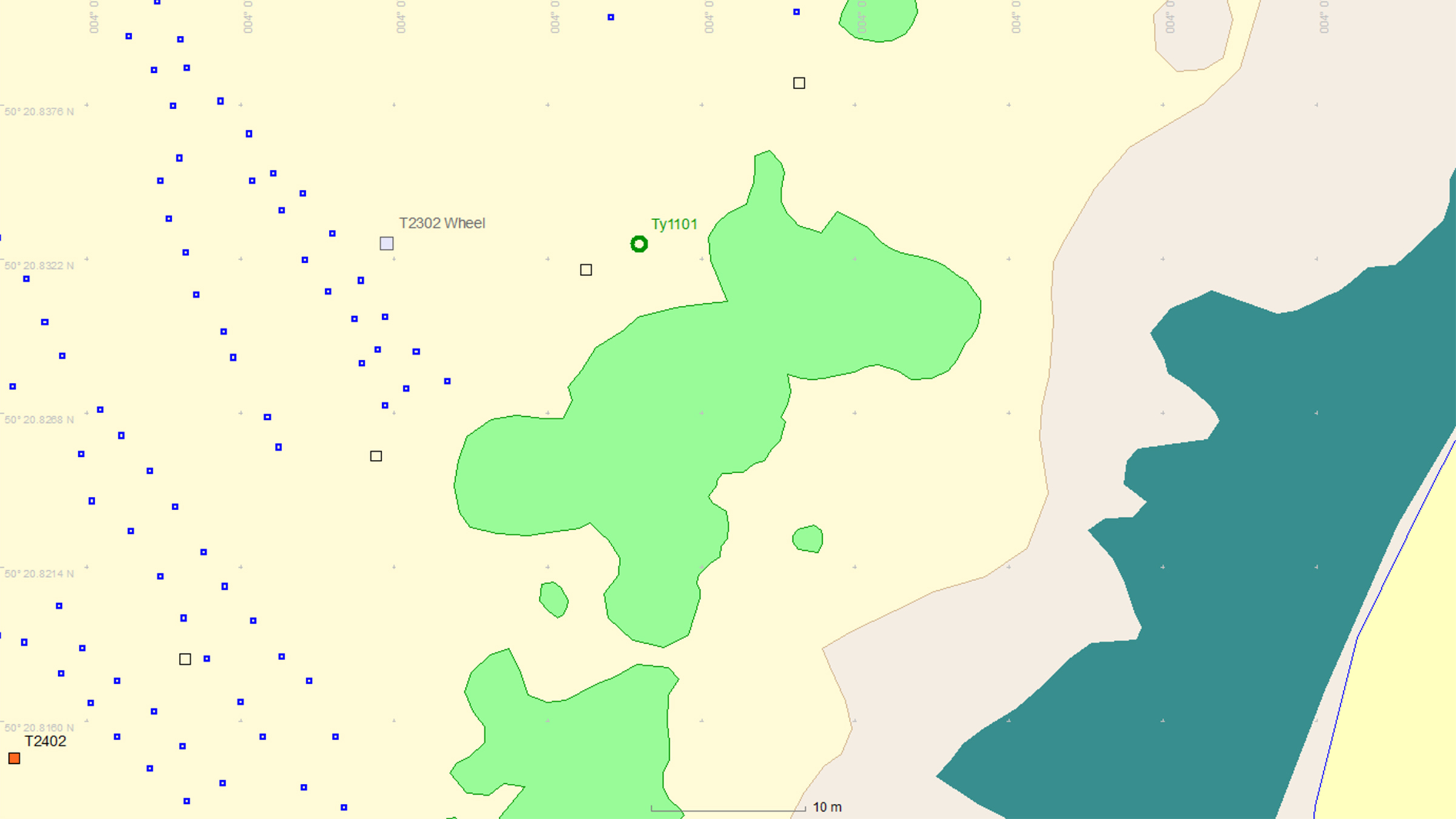
This is where Sonardyne and Wavefront Systems come in. The solution, which combines Sonardyne and Wavefront technology, is a survey boat carrying Solstice MAS™ (Multi-Aperture Sonar) as well as a SPRINT-Nav Mini mounted to a pole, deployed over the side of the boat; this maps the chosen area in 200 m wide strips. Once this survey has been completed, the sonar data that has been captured is then processed to create a map of the seagrass in a GIS. A Remotely Operated Vehicle (ROV) is then sent to the same area to ground truth features on the seabed to check that they are how they have been interpreted by Solstice MAS. The ROV is fitted with SPRINT-Nav Mini, allowing us to track its position underwater and guide it, using the map, to the features identified by Solstice; the ROV is also fitted with a camera and the recorded video can be used to create 3D models of the seabed.
Wavefront Systems’ Solstice MAS uses sound signals to produce high-quality images of the seabed, capable of creating images 200 metres wide at high resolution even in shallow water environments, all while consuming very little power. The Solstice family of sonars are built on unique MAS technology and are designed to fill the gap between standard side scan sonars, which are typically simple in design but give low image resolution, and Synthetic Aperture Sonars (SAS), which are expensive, more susceptible to complete data loss due to platform movement and also produce vast amounts of data. In order to execute more detailed mapping, Solstice MAS requires a high quality navigation sensor, which in this case is SPRINT-Nav Mini.
SPRINT-Nav Mini is an all-in-one vehicle guidance and navigation instrument, which combines AHRS data, Doppler Velocity Logger (DVL), Inertial Navigation System (INS) and depth sensor into a single housing. Having SPRINT-Nav Mini fitted onto the ROV provides positioning input, as well as attitude and heading data.
Creates images
0
m
at high resolution
ROV fitted with
0
D
camera
Solstice creates images
0
m
each side of the vessel
Adopting these technologies on such small versatile platforms opens the possibility of high-grade survey data in shallow waters. As a result of the cross Covelya Group collaboration between Sonardyne and Wavefront Systems, a high-definition map of seagrass beds can be created with a greater degree of accuracy than was previously possible with more traditional methods.
A seagrass restoration project conducted by the Ocean Conservation Trust (OCT) in Plymouth Sound, which involves monitoring, conserving and expanding the existing seagrass beds can be enhanced with the use of an ROV which has SPRINT-Nav Mini fitted to it. To help grow the existing seagrass beds, the OCT are placing seagrass mats on the seabed in Plymouth Sound. A survey boat fitted with Solstice and SPRINT-Nav Mini followed by an ROV fitted with SPRINT-Nav Mini can then be used to monitor and create a map of where these mats have been placed so that they have a better understanding of the success of the restoration and expansion project.
Overview
Ranger 2 – it's anything but standard
Ranger 2 is your complete subsea USBL workshop. Trace, track, command or position everything, in any depth, from any vessel, anything that your underwater operations may demand. Track a towfish, position an ROV, dynamically position your vessel, communicate with an AUV – or do all of this simultaneously.

What is possible
Ranger 2 comes with an impressive list of features including our award-winning 6G (sixth generation) acoustic hardware platform and Sonardyne Wideband 2 digital signal architecture. It provides stable and repeatable acoustic position referencing for your ship’s DP system, including those from GE, Kongsberg, MT, Navis, Thrustmaster and Wärtsilä.
As your needs grow and become more complex, bolt-on software packs unlock additional capability and protect your investment. Take the DP pack and enable your acoustic ranging to be aided by our inertial navigation technology (DP-INS). Add the robotics pack and commanding a swarm of up to 99 AUV’s is at your fingertips.
Ranger 2 can do even more, it also supports robust two-way data telemetry, allowing you to control our range of seafloor deployed, long-endurance sensors and recover your all-important data.
Track everything, in any depth, from any vessel
Why choose it?
- Tracks multiple targets to 11 km;
- Compatible with all makes of DP system – GE, Kongsberg, MT
- System accuracy: when fully optimised it will deliver 0.04% of slant range
- Works with a global inventory of pre-deployed Sonardyne 6G hardware
- Configurations available for USV and temporary vessel installations
- Valuable features included as standard
- Bolt-on packs available for growth with your operations and ambitions
- Developed and supported by a company with over 50 years of experience in innovative underwater technology
Learn more about Ranger 2 USBL
The kit
Transceivers
Our High Performance Transceiver (HPT), is available in a range of different designs to suit your operations whether they are in deep or shallow water or over a long layback.
HPT 5000 / 7000 are acoustic and telemetry transceivers designed for use with Ranger 2 USBL system. HPT 5000 enables targets to be tracked over a wide range of water depths; HPT 7000 is optimised for noisy DP drilling or construction vessels and in deep water.
HPT 5000 offers full hemispherical acoustic coverage so is a popular choice for tracking multiple targets (ROVs, AUVs, towfish, seafloor sensors) over a wide range of depths and elevations. The unit is also suitable for dynamic positioning reference on survey, research and offshore support vessels.
HPT 7000 is engineered for ultra-deepwater operations, tracking targets far below (rather than to the side of) a vessel, and for high vessel noise operating environments such as those typical of DP, drilling and construction where activity from thrusters is liable to cause signal interference.
If you need a solution for a vessel of opportunity, our pre-calibrated, all-in-one Gyro USBL transceiver is perfect. Lighter, smaller and just as capable, our second-generation Gyro USBL transceiver works seamlessly with Ranger 2 to track the position of your subsea targets from a USV, vessel of opportunity or from a pipelay vessel’s stinger over extreme ranges.
- All-in-one instrument; combined 6G acoustic transceiver and AHRS
- Choose between standard or ‘plus’ variants to suit your project’s specifications
- Optimises the performance of Ranger 2; eliminates lever arm offsets, pole bending and ship flexing errors
- Calibrated in-water before delivery – saving you time; install it and go to work
Transponders
The flexibility of the Ranger 2 family is further extended by our range of transponders to support a wide variety of your operations. WMT is a high-power transponder capable of operations to 7,000 m, while AvTrak 6 is our most capable acoustic vehicle instrument, combining the functions of a USBL transponder, LBL transceiver and modem for demanding applications such as AUV command and control.







Discover Ranger 2 in action
A new world of multi-robot ocean exploration
Read moreOptimising shallow water positioning for combined magnetometer and hydrographic surveys
Read moreLong-endurance AUV development with shallow water simplicity
Read morePerformance
• Up to 0.04% of slant range system accuracy
• Up 99 targets tracked, sequentially
• Up to 11,000 m tracking range (LMF)
• 1 Hz position update rate
• Supports all industry standard DP telegrams
• Supports acoustically aided INS
Acoustics
• MF frequency (20–34 kHz) or LMF (14-19.5 kHz)
• Compatible with a wide range of 6G transponders
• Supports Sonardyne Messaging Service for data exchange up to 9,000 bps
• Sonardyne Wideband 2 acoustics for reliable performance in both shallow and deep-water environments
Ownership
• ITAR Controlled: No
• Warranty: 1 year return to Sonardyne service centre
• UK Export Licence: Required
• What’s in the box: HPT 5000 / 7000 / Gyro USBL, deck cables, software, manual
Overview
• Can be used for both survey and construction phases
• Configurable to work in the LMF band enabling you to track targets to beyond 11 km
• Supports complex tracking scenarios such as structures and vehicles with multiple transponders and multiple remote offsets
Specifications table
| Feature | Specification |
|---|---|
| Design | The most powerful USBL system on the market |
| Incorporates 30 years of USBL innovation and know-how | |
| Recommended for installation on large vessels and USVs | |
| Global vessel track record; offshore, research, cable-lay, salvage and naval | |
| Shares common platform with other Sonardyne USBLs | |
| Performance | Up to 0.04% of slant range system accuracy |
| Up to 99 targets tracked, simultaneously | |
| Up to 11,000 m tracking range (LMF) | |
| 1 Hz position update rate | |
| Support all industry standard DP telegrams | |
| Supports acoustically-aided INS | |
| Acoustics | MF frequency (20-34 kHz) or LMF (14-19.5 kHz) |
| Sonardyne Wideband 2 digital acoustics for reliable performance in both shallow and deep environments | |
| Supports Sonardyne Messaging Service for data exchange up to 9,000 bps | |
| Compatible with a wide range of 6G transponders |
Frequently asked questions
Planning 6G beacon deployments
CASIUS calibration recommendations
What is a USBL and how does it work?
How to use Auto Discover to scan the water for unknown transponder addresses
How to format the sound speed profile for Marksman and Ranger 2
How to use HPR418BCD telegrams for DP
How to mount and extract an ISO image
How to track an underwater locator beacon
How to Compensate for Responder Latency
How to set up an SSB_LBP Telegram
Marksman/Ranger 2 DP INS indicator sequence explained
How to create an alarm to warn that the transceiver deployment pole has been left deployed
How to import waypoints into Ranger 2
How to enter Transceiver & Lodestar Offsets for Optimised USBL
Frequency management is obsolete. Here’s why.
How to set up Responder Mode
Opening a .DJF file on Sonardyne De Novo Job Viewer
How to Skip Telemetry Options in Rangers 2 and Marksman LUSBL
What should I do if my Sonardyne security dongle expires or reports a problem?
How to Capture a cef in Marksman and Ranger 2
How to download or upload files using Filezilla
Why am I getting old / incorrect data from my GyroCompatt 6+?
How to turn on a Lodestar Gyro Compatt using Ranger 2 or Fusion 2
I’m outputting a GGA from Fusion 2 / Ranger 2 to NaviPac but the position isn’t appearing in the correct location?
Health check for your acoustic system
How do I mark where my RT 6-1000 is deployed?
Will Compatt 6+ work with Ranger 2 and Marksman?
The transponder isn’t replying to interrogation or commands
Can I get USBL position updates from my AUV with Ranger 2/ Mini-Ranger 2?
How quickly can I start tracking beacons with Ranger 2?
Has anyone ever installed an echosounder and Ranger 2 USBL transceiver directly beside each other? Would this work?
Can I perform a USBL verification in shallow water without an ROV to deploy or recover the beacon?
How do USBLs work?
Which USBL Deployment Machine is most suitable for my vessel?
Advantages of using Ranger 2 for ROV tracking
When to use Depth Aiding
What’s new in Micro Ranger 2?
What to consider when mounting acoustic transducers
What acoustic address should I use for my USBL transponder
What do my CASIUS results tell me about my USBL calibration
Calibration tips for Ranger 2 USBL systems
How to align Gyro USBL to the vessel frame of reference
How to interface Ranger 2 into a 3rd party survey system
How can an uncrewed system interact with Ranger 2 software?
How can I synchronise a clock on my AUV to a GNSS reference using Ranger 2?
What is Telemetry Tracking, and why would I need it?
How to release an RT 6 acoustic release transponder using Ranger 2
How to set up an update rate in Ranger 2
How to set the operating range in Ranger 2
How to configure sound speed in Ranger 2
Ranger 2 – How to release an RT6 acoustic release transponder
Software and firmware
Software and control hardware
How to enter Transceiver & Lodestar Offsets for Optimised USBL
How to set up Responder Mode
Opening a .DJF file on Sonardyne De Novo Job Viewer
What’s new in Micro Ranger 2?
What do my CASIUS results tell me about my USBL calibration
How to release an RT 6 acoustic release transponder using Ranger 2
How to set up an update rate in Ranger 2
Top tips
How to Skip Telemetry Options in Rangers 2 and Marksman LUSBL
What should I do if my Sonardyne security dongle expires or reports a problem?
How to Capture a cef in Marksman and Ranger 2
How to download or upload files using Filezilla
Which USBL Deployment Machine is most suitable for my vessel?
Advantages of using Ranger 2 for ROV tracking
When to use Depth Aiding
What to consider when mounting acoustic transducers
What acoustic address should I use for my USBL transponder
Calibration tips for Ranger 2 USBL systems
How to align Gyro USBL to the vessel frame of reference
Datasheets
Manuals and quick start guides
Technical bulletin



Overview
Track anything, to any range
HPT 5000/7000s are acoustic and telemetry transceivers designed for use with Ranger 2 USBL and Marksman LUSBL systems. HPT 5000 enables targets to offer wide range of water depths to be tracked. HPT 7000 is optimised for noisy DP drilling and construction vessels and in deep water. Suitable for a wide range of applications from pipeline positioning and riser monitoring to subsea structure installation as well as tracking and communications.

Overview
When it comes to USBL and LUSBL transceivers, one model does not fit all situations and vessels. For Ranger 2 and Marksman installations, our High Performance Transceiver (HPT) is available two primary configurations.
HPT 5000
HPT 5000 offers full hemispherical acoustic coverage so it’s a popular choice for tracking multiple targets (ROVs, AUVs, towfish, seafloor sensors) over a wide range of depths and elevations. The unit is also suitable for dynamic positioning reference on survey, research and offshore support vessels.
HPT 7000
HPT 7000 is engineered for ultra-deepwater operations, tracking targets far below (rather than to the side) of a vessel, and also high vessel noise operating environments, as those typically encountered on DP drilling and construction where aeration from thrusters is liable to cause signal interference.
Both models of transceiver fully support 6G LBL operations using Fusion 2 LBL software. They are also highly capable acoustic communications modems, able to interrogate, command and recover data payloads from deployed Sonardyne instruments including AMTs and Fetch. Supporting telemetry rates of up to 9,000 bps minimises the time a vessel has to wait on location to recover data, as well as supporting LBL operations.
HPT 5000/7000s are also available in Gyro USBL configurations offering calibration-free installation and use.
At a glance
- Use with Ranger 2 USBL and Marksman LUSBL systems
- Can also be used to communicate and harvest data from Sonardyne sensors
- Hemispherical (HPT 5000) or directional (HPT 7000) arrays to suit your vessel and application
- Can be deployed other-the-side, through-tube or through-hull
- Suitable for new-build vessels or USBL/LUBL upgrade for your existing vessel
All HPTs are built on our 6G technology platform with multi-element processing to enable transponders to be positioned more precisely, more quickly and more robustly due to improvements in signal processing algorithms and array design.
Functionality such as ‘Discovery Mode’ enables vessels equipped with Ranger 2 and Marksman to enter an offshore area and automatically detect previously deployed transponders (including their configured address and channel), making simultaneous operations using shared seabed arrays possible.
Manufactured in aluminium-bronze, HPTs are intended to be fitted temporarily or permanently to a vessel’s through-hull or over-the-side pole. HPT 5000s (including Gyro USBL 5000s) have also been fitted to large USVs for uncrewed missions controlled from over-the-horizon.
For specialist applications, inverted USBL, LMF frequency and extreme depth range HPT transceivers are also available. Please get in contact to discuss your requirements.








Ranger 2 in action
Optimising shallow water positioning for combined magnetometer and hydrographic surveys
Read moreAutonomous robots prepare to storm the ocean depths
Autonomous robots prepare to storm the ocean depths
A new world of multi-robot ocean exploration
Read moreSpecifications table
level, vessel noise, water depth, mechanical rigidity of the transceiver deployment machine, SV knowledge and proper calibration of
the total system using CASIUS.
| Feature | Type 8142-001 | Type 8142-002 (deepwater optimised unit) | |
|---|---|---|---|
| Operational frequency | MF (20–34 kHz) | MF (20–34 kHz) | |
| Transceiver performance |
Operating range | Up to 7,000 m | Up to 7,000 m |
| Acoustic coverage | Up to ± 90° | Up to ± 90º Optimised for deep water (depending on frequency of operation) |
|
| Range precision | Better than 15 mm | Better than 15 mm | |
| Positioning repeatability | All transceivers tested to better than 0.1% of slant range 1 Drms | All transceivers tested to better than 0.07% of slant range 1 Drms | |
| Transmit source level (dB re 1 µPa @ 1 m) | 200 dB | 200 dB | |
| Tone Equivalent Energy (TEE) | 206 dB (13 JA) | 206 dB (13 JA) | |
| Electrical | 48 V dc (±10%), Typical 15 W, Max 120 W |
48 V dc (±10%), Typical 15 W, Max 120 W |
|
| Communication | RS485, baud rate switchable, ethernet 100 Mbps |
RS485, baud rate switchable, ethernet 100 Mbps |
|
| Operating temperature | -5 to 40°C | -5 to 40°C | |
| Storage temperature | -20 to 45°C | -20 to 45°C | |
| Mechanical construction | Aluminium bronze | Aluminium bronze | |
| Dimensions (length x diameter) | 322 x 225 mm | 391 x 310 mm | |
| Weight in air/water | 26.7/15.3 kg | 46.9/29.0 kg | |
| Options | Tilted array adaptor | Tilted array adaptor |
Frequently asked questions
How to clean a transceiver array face
How to enter Transceiver & Lodestar Offsets for Optimised USBL
HPT Deployment Tests
Has anyone ever installed an echosounder and Ranger 2 USBL transceiver directly beside each other? Would this work?
How do USBLs work?
Does the HPT’s main connector need any maintenance?
When to use Depth Aiding
What acoustic address should I use for my USBL transponder
How to interface Ranger 2 into a 3rd party survey system
STP files
Software and firmware
Software and control hardware
Datasheets
Did you know?
Both HPT 5000 and 7000 are available in Gyro USBL configurations


