Backed by over 40 years of LBL system experience, Fusion 2 is the obvious choice for your offshore installation projects. Its 6G+ technology allows centimetric subsea positioning in all water depths. Highly robust and accurate instruments, professionally supported by our in-house engineers and surveyors, have made it the system of choice for subsea structure installations for decades.
Used with products such as GyroCompatt 6+, it provides you with centimetric positioning along with class leading Lodestar gyroscopes for heading, pitch and roll measurements all in a single, easy to deploy instrument.
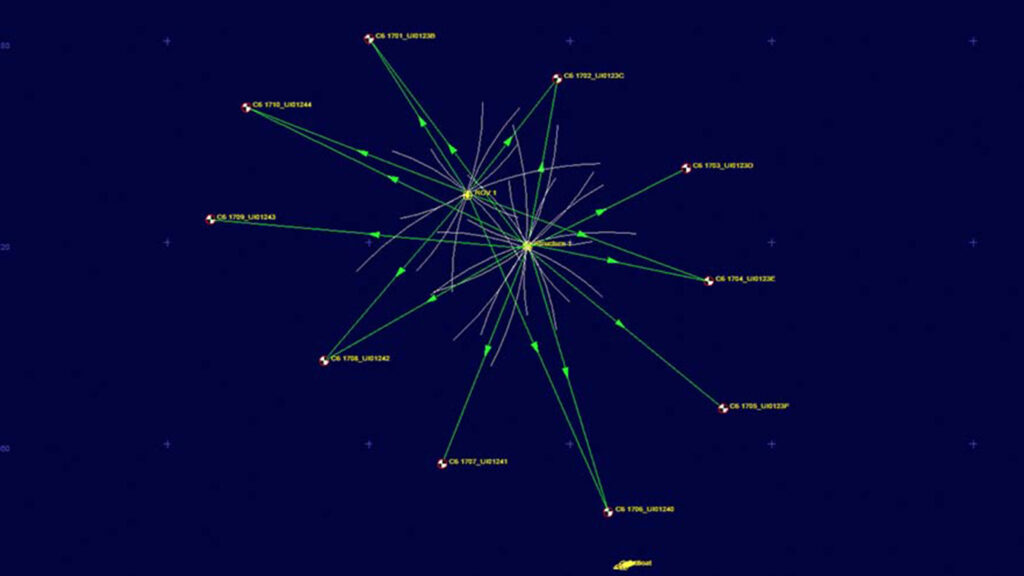
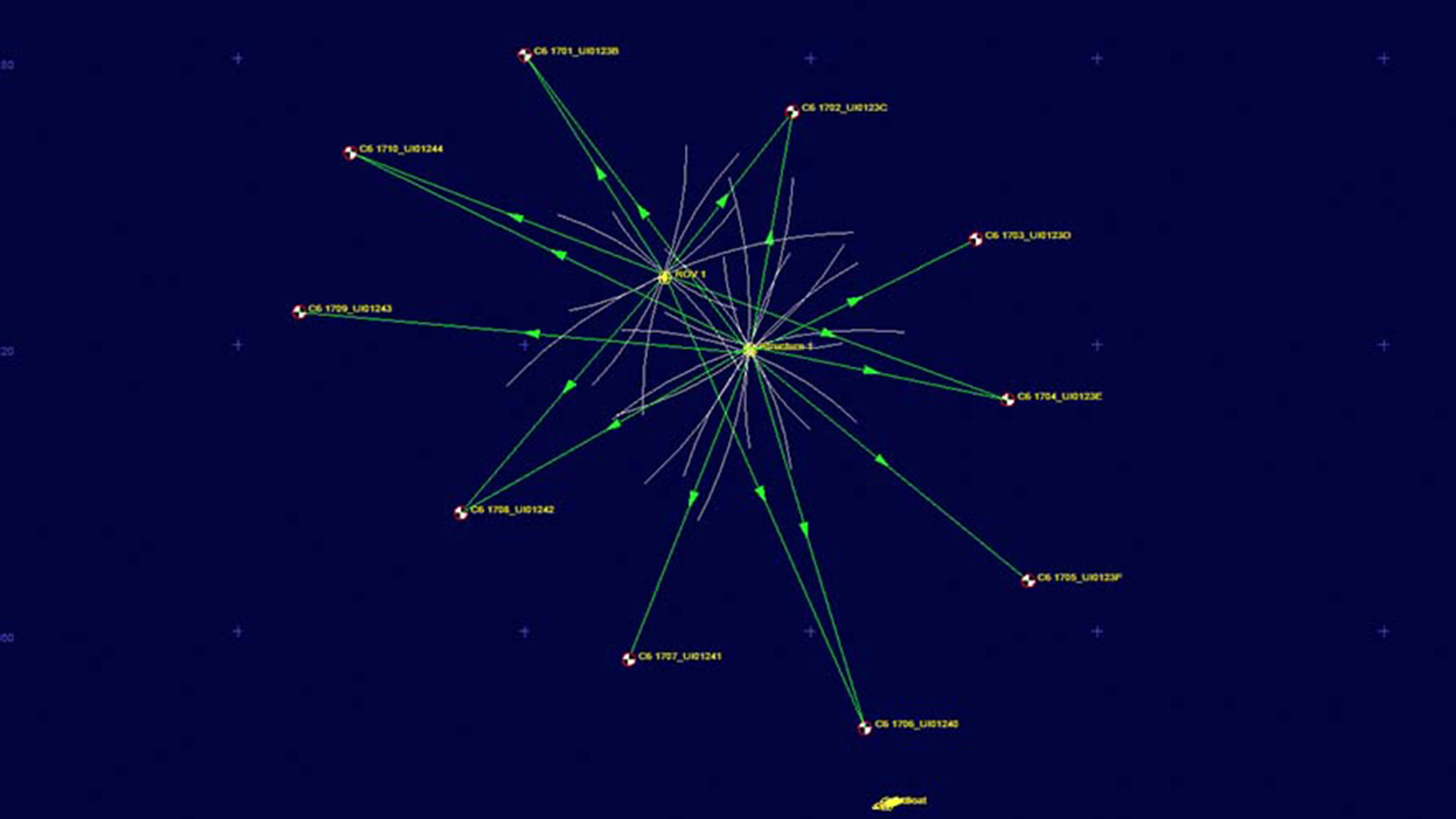
If your underwater operations require precise measurements, an acoustic metrology system using several Compatt 6+ transponders can be placed in a network on the seabed / structures / hubs. The depths of the Compatts can then be accurately measured and 6G+ Wideband acoustic ranges collected between them.
Fusion 2 enables your seabed transponders to be SLAM calibrated in real-time for easier and faster Sparse LBL operations. And by embedding sensor data with high-update navigation ranging data, there’s no more interruptions to positioning updates at critical moments.
You’ll begin to see the benefits even before your project teams head offshore. Acoustic and INS projects can be configured and checked onshore prior to vessel mobilisation – saving you time, streamlining procedures and helping you to further de-risk operations.
If you need to tailor your operations, Fusion 2 enables multiple computations, comparing different set-ups, allowing you to pick the one you want. Sparse LBL might suit one operation more than LBL and vice versa. Now it’s easy to check, on-site, which works best for you.