Underwater defence technology company Sonardyne is aiming to improve the safety and efficiency of naval mine counter measures (MCM), explosive ordnance disposal (EOD) and demolition operations, with the introduction of a secure, wireless underwater initiation capability.
The company’s new Initiation Transponder 6 (IT 6) is designed to be connected directly to a remotely deployed, non-electric mine neutralisation device, such as a Cobra MDS from ECS Special Projects. This allows EOD teams to send a wireless, acoustic command from their vessel, safely initiating a shock tube detonator. Recent demonstrations were conducted over distances in excess of 1,000 m away.
IT 6 is based on Sonardyne’s field-proven Wideband 2 digital signal technology, which offers a reliable and long-range underwater wireless communications link. The development of IT 6 means that service personnel no longer need to hard wire mine neutralisers up to signal relay buoys on the surface and are not restricted to good weather and daylight for setting up an initiation operation.
IT 6 is small, lightweight and designed to be placed by a clearance diver or remotely operated vehicle (ROV) for both high order detonation and low order deflagration. It features multiple layers of security to prevent unintended activation, including a hydrostatic switch, which only allows the unit to be armed when a pre-determined depth has been reached.

Operations using IT 6s are controlled using Sonardyne’s new rugged Deck Topside case and cabled dunker. Environmentally rated to IP67, the case features a daylight readable interactive 7-inch resistive touch screen and rechargeable battery, for when operating from small combat craft with no external power.
The user interface was designed in close co-operation with EOD technicians and enables operating parameters to be set and multiple IT 6s to be configured prior to deployment. During a live operation, two physical buttons provide an additional layer of security, requiring users to hold one button to arm, then simultaneously press the other to initiate.
The dunker, which is supplied with 10 m of cable, provides a secure two-way communications link between the surface and IT 6, and is simply lowered over the side of a vessel.
Tom Rooney, Defence Sales Manager at Sonardyne in the UK said; “Navies around the world are investing heavily in new technologies to support their diver and remotely controlled mission objectives, not least mine counter measures. IT 6 is one such technology and represents an important new addition to the MCM and other underwater ordnance playbooks.
[blockquote author=” Tom Rooney, UK Defence Sales Manager at Sonardyne”]”When explosive ordnance disposal of both modern-day and historical sea mines is deemed necessary to maintain control of the underwater domain, IT 6 will help those involved with the hazardous task to operate safely, wirelessly and in any weather, day or night. Underwater acoustic command and control is a core Sonardyne capability, so IT 6 can be considered as reliable and as secure as traditional methods involving shock tubes and a lot safer than electrical detonation lines.”[/blockquote]
Marine technology company, Sonardyne, is aiming to improve the safety and efficiency of unexploded ordnance (UXO) clearance during offshore energy projects with the introduction of a secure, wireless underwater initiation capability.
The company’s new Initiation Transponder 6 (IT 6) is designed to be connected directly to a remotely deployed, non-electric mine neutralisation device, such as a Viper MDS from ECS Special Projects. This allows explosive ordnance disposal (EOD) teams to send a wireless, acoustic command from their vessel, safely initiating a shock tube detonator. Recent demonstrations were conducted over distances in excess of 1,000 m away.
IT 6 is based on Sonardyne’s field-proven Wideband 2 digital signal technology, which offers a reliable and long-range underwater wireless communications link. The development of IT 6 means that technicians no longer need to wire UXO neutralisers up to signal relay buoys on the surface and are not restricted to good weather and daylight for setting up an initiation operation.
IT 6 is small, lightweight and designed to be placed by an ROV or diver for both high order detonation and low order deflagration. It features multiple layers of security to prevent unintended activation, including a hydrostatic switch, which only allows the unit to be armed when a pre-determined depth has been reached.

Operations using IT 6s are controlled using Sonardyne’s new rugged Deck Topside case and cabled dunker. Environmentally rated to IP67, the case features a daylight readable interactive 7-inch resistive touch screen and rechargeable battery, for when operating on small boats with no external power.
The user interface was designed in close co-operation with EOD technicians and enables operating parameters to be set and multiple IT 6s to be configured prior to deployment. During a live operation, two physical buttons provide an additional layer of security, requiring users to hold one button to arm, then simultaneously press the other to initiate.
The dunker, which is supplied with 10 m of cable, provides a secure two-way communications link between the surface and IT 6, and is simply lowered over the side of a vessel.
John Houlder, Product Manager at Sonardyne said; “European waters are littered with unexploded ordnance (UXO), the result of past military conflicts, training exercises, weapons development and dumping activities at sea. During the construction phases of wind farms, for example, the risk to personnel, assets and project timescales are significant.”
[blockquote author=” John Houlder, Product Manager at Sonardyne”]”When disposal rather than avoidance is deemed necessary for turbine or cable route placement, our new IT 6 and topside will help those involved with the hazardous task operate entirely wirelessly and in any weather, day or night. Underwater acoustic command and control is a core Sonardyne capability, so IT 6 can be considered as reliable and as secure as traditional methods involving shock tubes and a lot safer than electrical detonation lines.”[/blockquote]
Metocean and environmental data measurement specialist MSM Ocean and marine technology company Sonardyne have agreed to team-up on the supply of a complete solution for warning coastal communities of a tsunami.
The two companies can now jointly provide at-risk coastal nations with a single source of supply of tsunami early warning systems.
The agreement combines MSM Ocean’s expertise in oceanographic measurement buoys, on-board data processing and telecommunications and Sonardyne’s highly precise deep water pressure measurement and acoustic through-water telemetry capabilities.
Together, these allow minute changes in deep water pressure at the seafloor that indicate a tsunami to be reliably detected, triggering a direct alert to national emergency organisations via acoustic and satellite communications, all within seconds.
The tsunami early warning system is fully International Association of Marine Aids to Navigation and Lighthouse Authorities (IALA) compliant and can be deployed in areas of up to 7,000 m water depth.
Through the teaming agreement, MSM Ocean and Sonardyne have also agreed to explore further possibilities for combining their technologies in support of remotely connecting ocean scientists to their instruments on the seafloor via buoys.

Sonardyne has been supplying integrated Bottom Pressure Recorders (BPRs) configured for deepwater tsunami detection to organisations around the world since 2007. Combining precise sensing, long-life battery and reliable communications in one easy to deploy and recover instrument, they were developed following the devasting 2004 Indian Ocean tsunami. For the past decade, these have been integrated into MSM Ocean’s buoy-based Tsunami Early Warning Systems, which have been successfully installed along the Pacific coast of South America.
This includes two systems deployed off Ecuador which detected the January 15 tsunami, caused by the Hunga-Tonga submarine volcano eruption, 10,000 km away in the South Pacific. Alerts were raised by MSM Ocean’s buoys with the National Tsunami Warning Center of Ecuador just 35 seconds after the wave was detected by Sonardyne’s Bottom Pressure Recorder.
[blockquote author=” Cecile Zanette, CEO at MSM Ocean”]”Tsunamis present a threat to numerous coastal countries around the world mostly located around the Pacific Ring of Fire, but also in other areas maybe less present in our minds, such as in Europe and the Caribbean for example. Reliable and available systems of detection and early warning are a key component in the complex equation to mitigate the risk to the population. And this is exactly such a system, field-proven, that we have developed combining Sonardyne’s highly precise Bottom Pressure Recorder technology with our instrumented buoys’ expertise.”[/blockquote]
Geraint West, Head of Science at Sonardyne, says, “We have been working closely with MSM Ocean for more than a decade and together we recognised the benefit of providing a fully integrated and supported seafloor-to surface-to shore solution. By formalising our relationship, we can now offer a one-stop-shop for this critical capability to a wider range of coastal communities. Organisations can now approach either company for their remote tsunami early warning system configured to match their exact needs.”
Managing the increasingly diverse array of assets in the underwater battlespace can be complex. It doesn’t have to be. Tom Rooney, technical sales manager, explains how you can track, command, control and communicate with your underwater assets – diver, UUV, AUV or persistent seabed sensor – with our USV or vessel of opportunity ready Mini-Ranger 2 USBL system.
Naval warfare – the underwater battlespace – has always been a highly technical discipline. It’s even more so today. There’s a growing fleet of uncrewed, unmanned, robotic and autonomous vessels and vehicles increasing the complexity that navies have to deal with. These platforms – USVs, UUVs or AUVs – are now being widely exploited, across industry and defence, by friendly and not so friendly forces.
Tracking, monitoring, controlling and communicating with, and between, these diverse platforms in the undersea warfare domain poses a number of key challenges. The size, weight and power capacity of UUV/AUVs and seabed sensor nodes, designed for endurance, limit how much hardware you can integrate onto them. Too many devices means lowering your platform’s persistence.
The wide variety of asset and equipment types also potentially introduces additional costs and complexities in terms of operator training, spares support, reliability and maintenance. Your new uncrewed or autonomous assets may well also be operating alongside more traditional underwater operations, such a diver operations, towed body systems and crewed submarine platforms.
Is there a way to simplify command and control (C2) of these diverse platforms in undersea warfare using 21st Century commercial, off-the-shelf (COTS) systems? Here at Sonardyne, we not only think so, we know so. Forces we work with are already using a single system that delivers all the command, control and communications capabilities required for all your unmanned surface and underwater assets, including delivering data from intelligent persistent sensors.
Underwater tracking, command and communications in one – Mini-Ranger 2

Our Mini-Ranger 2 Ultra-Short Baseline (USBL) system combines all the tracking, command and communications capability you need in one easy-to-use package. Based on our sixth generation (6G) hardware and Wideband 2 signal architecture, it’s able to simultaneously track up to 10 subsea targets to a standard operating range of 995 m (extendable up to 4,000 m), at the fast update rates needed in the dynamic training or operational environments you operate in.
The small size, weight and resistance to background noise of Mini-Ranger 2’s HPT 3000 transceiver make it ideal for deployment from a small patrol vessel, dive support vessel or USV. Even in high noise environments it will continue to track and communicate with your subsea fleet or subsea nodes or harvest data from your persistent undersea sensors. Because it comes with its own built-in motion reference unit and heading sensors, you can deploy quickly from your RHIB, USV or crewed ship, with no need for calibration routines, and still get superior tracking position accuracy.
Because it’s so versatile, Mini-Ranger 2 is used across many applications; oceanographic, hydrographic and in offshore construction. It’s used for tracking towed bodies, divers, AUVs and UUVs. It’s used in training and live operations, from mine warfare to seismic node positioning. But what can it do for you in the underwater battlespace? Well, most tasks, actually.
Get in command and control of your UUV/AUVs

If you’re looking to operate with multiple vehicles in the water, the optional Mini-Ranger 2 Robotics Pack unlocks the functionality for simultaneously tracking and communicating with multiple UUVs or AUVs, when fitted with one of our interoperable 6G transceivers. That could be Nano AvTrak 6; a small single device that acts as a positioning transponder, modem, communications relay modem and emergency locator transponder – all in one.
Time-stamped position information calculated by Mini-Ranger 2 is transmitted to the UUV embedded within each short acoustic interrogation signal to keep the UUV’s navigation system updated and reduce errors. Status information and critical data packets can be received from the UUV through Mini-Ranger 2. These communications can be easily output to third party processing software as required. Mini-Ranger 2 also enables the synchronisation of UUV timing to less than two microseconds.
It’s a great combination. One of our naval customers in Asia is using it for C2 of their mine countermeasures UUV. With Mini-Ranger 2 at the surface and AvTrak 6 on the UUV, they’re in full control with limited complexity.
Keeping divers safe, secure and on track

If your primary goal is tracking divers, you might want to combine Mini-Ranger 2 with our smallest transponder, Nano. With this pairing, your dive supervisor can monitor the movement and location of each diver in real-time and set various alarms and notifications, should divers stray from the plan or enter areas of danger. It’s a combination that makes Mini-Ranger 2 very useful for training, as well as many operational dive scenarios.
We’ve been working with a Scandinavian navy, which has been using Mini-Ranger 2 to train their special forces. They can track their divers in real-time and then use the tracks after each mission for the debrief. Others also use Mini-Ranger 2 to track divers during more routine tasks, like mine clearance.
Position, mark and release with your ROV
With Mini-Ranger 2, your operator has real-time remotely operated vehicle (ROV) position information, so that the absolute position of any artifact the ROV might interact with can be recorded. But why stop there? Mini-Ranger 2 is USV-ready. So, choosing from a wide range of supported transponders that can be used with Mini-Ranger 2, you can mount your ROV on a USV and then mark, recover or interact with subsea objects or your own equipment completely remotely. Pick from simple marker transponders, such as Nano or our Marker 6, to one of our family of acoustic release transponders, such as the RT 6-1000.

It’s a combination that’s now available to navies and ideal for riskier operations like naval mine clearance. Why send in divers when you can use marine robotics? We’re supporting a customer to bring this capability to market. With their USV, Mini-Ranger 2, a Seatronics Valor ROV and a mine neutralisation system, they’ll be able to find, identify and neutralise contacts all remotely.
Your command, control and communication link to persistent seabed sensors
With Mini-Ranger 2 you can also deploy, communicate and control, via crewed and uncrewed vessels, your seabed sensors, whether that’s to support for persistent intelligence, surveillance reconnaissance (ISR) or environmental monitoring. With Mini-Ranger 2, your sensors can be deployed up to 995 m deep (or 4,000 m with our extended range option) and their as-laid position can be quickly calibrated and reported. Using Mini-Ranger 2’s in-built processing tools, you’ll get a position to similar confidence levels as the GNSS system used to provide vessel position data to the system.
We also have acoustic communication nodes, for your command, control, communications and computers (C4) needs. Our Fetch subsea sensor logging nodes, for example, are commonly used to support third party data gathering and relay. Just integrate your sensor.
In fact, one of our Mini-Ranger 2 users initially bought it to track their AUVs and ROVs in their test range. They’ve since realised they can also use it to make commanding their releases easier and they’re now looking to use it to communicate with their seafloor sensors.
A Swiss army knife for undersea warfare
Mini-Ranger 2 has many other useful features that can make life easier when operating in the underwater battlespace. It’s got a background noise monitoring display, pinger locator algorithms, live diagnostics and can output telegrams to third party systems such as the Warship Electronic Chart Display and Information System (WECDIS) and MINTACS post-mission analysis graphs and metrics.
It’s a Swiss army knife for undersea warfare; a single, intuitive to use, low-logistic but reliable system that unlocks a wide variety of capability, allowing you to rationalise your subsea equipment specifications and get the most of your underwater assets.
Want to learn more about how Mini-Ranger 2 can support your undersea command, control and communications? Our experts can help guide you today.
Acoustic and inertial position reference systems from marine technology company Sonardyne have been chosen to underpin the critical station keeping activities of multiple deepwater vessels operating in the energy and ocean research sectors.
Through a combination of upgrades to existing installations and the purchase of new systems, four deepwater drillships, a marine construction vessel and a floating production system working in North and South America will be using Sonardyne’s 6G (sixth generation) Marksman DP-INS technology. In addition, an ultra-deepwater scientific drilling vessel has now also upgraded its Marksman DP-INS system to the latest (sixth generation) equipment configuration.
Marksman DP-INS improves vessel positioning performance by exploiting the long-term accuracy of Sonardyne’s Wideband acoustic signal technology with high integrity, high update rate inertial measurements. The resulting navigation output is capable of riding-through short-term acoustic disruptions associated with deep water drilling and is completely independent from GNSS so can be considered as a third, independent reference for DP Class 3 vessels.
The system uses a combination of single or dual redundant surface transceivers, Sonardyne’s own vessel-based INS sensor and Long Baseline (LBL) seafloor transponders. However, unlike conventional LBL operations, Marksman DP-INS does not need a full seabed array of transponders to be installed and calibrated before subsea operations can commence. For most subsea tasks, positioning specifications can be met with only one or two transponders deployed on the seabed. Additionally, as the system needs only occasional aiding from the acoustics, transponder battery life is substantially increased so the need to task an ROV to deploy and recover transponders for servicing is reduced.
Noble Drilling has ordered a 6G upgrade to the Marksman system onboard its Noble Globetrotter II, adding two HPT 7000s to the vessel, as well as Compatt 6+ transponders for its vessel seabed array inventory and for wireless underwater marine riser flex joint monitoring.
The DP-INS system onboard Helix Energy Solution’s Helix Producer-1 floating production system has also been upgraded to 6G. The vessel is operating on the Phoenix and Tornado field in the US Gulf of Mexico for Talos Energy.
Two Brazilian drilling company’s deepwater drillships. Both rigs were fitted with Marksman DP-INS when they were launched in 2011. Also in Brazil, another rig operator has ordered a 6G upgrade for the Marksman system onboard its 6th generation, deepwater semi-submersible rig.
An Asia-based scientific drilling ship recently completed a Marksman DP-INS 6G upgrade. Sonardyne’s Marksman LUSBL technology was first installed on the vessel in 2005. This was upgraded to DP-INS with Sonardyne’s 5G hardware in 2012.
A US-based marine contractor has also ordered a Marksman 6G upgrade kit system to DP-INS to improve their vessel DP capability, especially when GNSS positioning is unstable or masked by nearby platforms.
[blockquote author=” Andre Moura, sales & Application Manager, at Sonardyne in Brazil”]”Vessel utilisation rates have been rising steadily over the past 12 months, providing vessel owners and operators with the confidence to invest now in technologies that will deliver long-term operational efficiency gains. Marksman DP-INS is one of those technologies; it’s mature a field proven technology which can be installed in the field and addresses industry’s need for a third, independent DP reference.”[/blockquote]
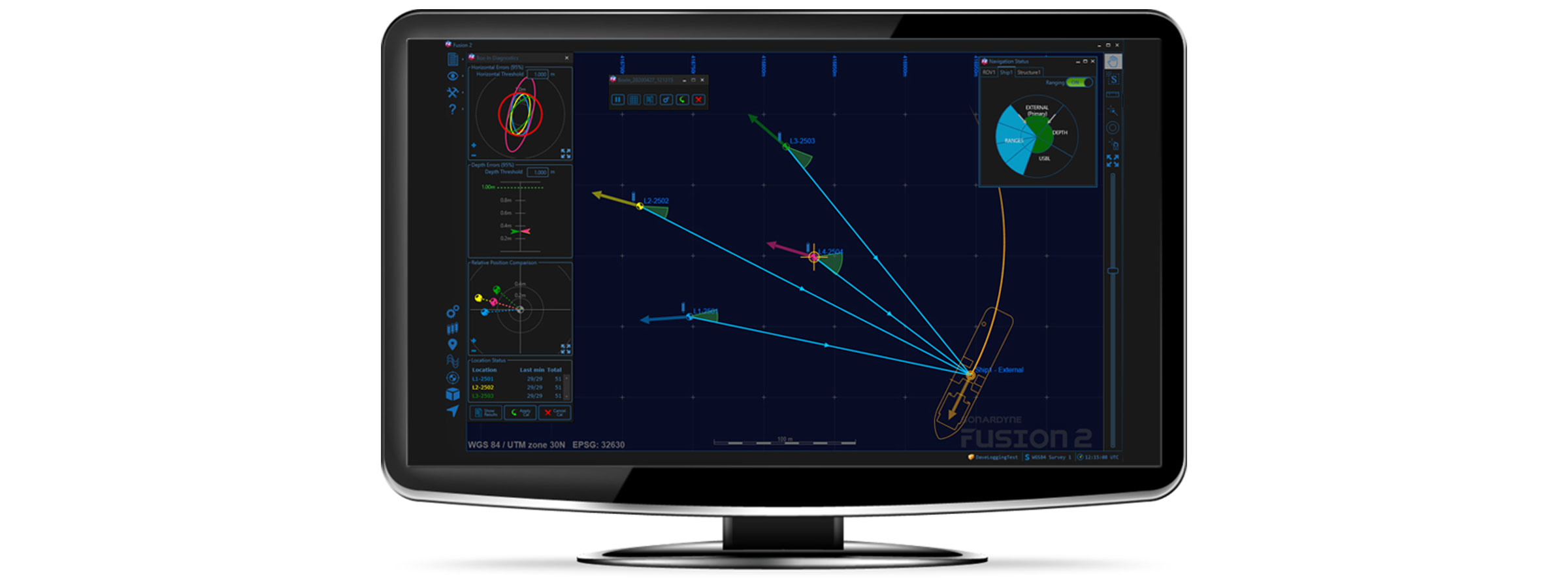
It’s been brought to our attention that people think that Fusion 2 has taken away the need for a surveyor’s skills for long baseline (LBL) operations. Seeing it in action, maybe you could be forgiven for thinking that.
The screen tells you what you need to know, and you don’t need to read raw comms like the guy from the matrix to know what’s happening. You can still keep the comms window open to scare away the client rep if that’s your worry, but with Fusion 2’s advanced command scheduling you’d have to be a machine to read it all now anyway.
Real-time baseline calibration makes it much easier to see where and when things may be going wrong. An incorrect TAT, depth or position will be obvious in a few pings in the data collection, so no more having to deal with the ‘all or nothing’, ‘hit and hope’ feeling you had when postprocessing a data set for the first time, in days gone by. The hour or more playing with the errors in the calibration to get a nice fit, is now all done in minutes. This all allows you to grab a coffee and double check your numbers one more time, enabling you to focus on QC rather than firefighting bad data.

Adjustments can now be made in real time to the confidence values assigned to the position of each and every Compatt transponder, so one Compatt in a difficult location won’t reduce the overall quality of the array. Individual confidence values also mean you can use more types of position sources. For example, lower quality positions can be used to help orientate an array, alongside more accurate SLAM’d, acoustic box-in and published positions, if they are given a suitable error and meet your project specification. As each reference position has a different weighting in the least squares solution, performance isn’t lost in the way it was with the global scale error approach used in Fusion 1 to make difficult arrays fit the ranges.
Also true, is that interfacing to a USBL system for box-ins is now much simpler. Sonardyne and third-party USBLs can now use the same interface, negating the requirement to connect directly to USBL transceivers, and helping to standardise installations across vessels.

It’s true that the box-in itself is now also in real-time, giving the same benefits as already discussed for baselines. And to add to that, box-in collection also has new options for tidal compensation using GNSS height variation and tidal models, to control the corkscrewing of the vessel position as the tide changes as it sails the loop. This source of error could easily account for a 2m shift in typical oceanic conditions. But that just makes you look better, right?
I suppose as the GUI is nice to use, anyone could operate it once it is up and running, with a bit of training, but for those that have a deeper understanding and need to get the best performance from the system, the tools are there to do more than ever before, and faster. If you know how to use them.
Collecting and QC’ing data is often more than just meeting confidence levels, as these only test for random errors. Biased data is much harder to spot after the event. So, let’s not become complacent that this is easy. In customer support we still regularly deal with problems due to incorrect geodesy settings, poor sound speed control, incorrect depth datums and reductions, and pressure depth conversion confusion, so a good understanding and good practices are still as essential for success as ever.
Undersea weapon, sensors and integrated systems specialist Advanced Acoustic Concepts has chosen underwater positioning technology from maritime technology company Sonardyne to work for the US Department of Defense (DoD).
Advanced Acoustic Concepts chose Sonardyne’s portable Micro-Ranger 2 Ultra-Short Baseline (USBL) system following a market review of commercial-off-the-shelf (COTs) systems suitable for its needs, particularly around supporting its existing DoD programs and providing its operatives with increased situational awareness during open ocean missions
Micro-Ranger 2 is designed to provide everything needed to start tracking divers, remotely operated vehicles, autonomous or unmanned underwater vehicles or any other subsea targets, all from a single IP-67-rated ruggedised case small enough to operate anywhere, from anything.
It can track up to 10 targets to over 3,000 ft (995 m) and comes complete with a surface-deployed Micro-Ranger Transceiver, a GNSS antenna, and two of Sonardyne’s smallest transponders, the Nano. The one-box solution also houses a built-in battery to support more than 10 hours of continuous use, as well as ethernet and Wi-Fi connectivity to connect to a user’s laptop for fast and easy tracking.
[blockquote]Dan Zatezalo, Technical Sales Manager for Sonardyne in the US, says; We’re really excited to be supporting the work of such a technically strong company as Advanced Acoustic Concepts, which plays a critical part in supporting the US Navy. [/blockquote]
“COTS equipment is playing an increasing role in supporting wider military operations and systems like Micro-Ranger 2 are part of that eco-system; providing navies globally with affordable, easy to acquire, mobilize, and dependable maritime technologies.
“The flexibility of the hardware platform and secure digital signal architecture inside Micro-Ranger 2 means that customers can also benefit from being able to use and integrate our different navigation, communications and control mission systems, seamlessly, all with technical and application support from our facilities in the US.”
Advanced Acoustic Concepts, which is based in New York and has facilities in Maryland and Pennsylvania, is co-owned by Leonardo DRS and Thales.
So you’ve now met our new business development managers for offshore renewables, Mike Ellis, and marine robotics, Aidan Thorn. Now it’s time to meet our third new BDM, Michelle Barnett. Michelle’s moved over from doctoral research into ocean biochemistry to help oceanographers across the globe gain more insight, in whatever discipline they’re in.
As a Doctoral Researcher I found myself on research vessels year after year collecting data in the Western English Channel, offshore of Falmouth and Plymouth. Back then, my focus was phytoplankton communities within subsurface chlorophyll maxima and the significance of these features in a biogeochemical and ecological context. I used equipment ranging from an acoustic current Doppler profiler (ADCP) and conductivity, temperature, and pressure of seawater instrument (CTD) with a Niskin rosette sampler to a holographic camera system and a flow cytometer.

Fast forward three years and I am back in Plymouth. This time, it was aboard Sonardyne’s trials and training vessel, Sound Surveyor, getting hands-on with our (Sonardyne) equipment, including a Pressure Inverted Echo Sounder (PIES), SPRINT-Nav hybrid navigation instruments and the Mini-Ranger 2 Ultra-Short BaseLine (USBL) system. Being able to see this kit in action really makes you appreciate just how innovative, effective and easy to use Sonardyne technology is. But also how adaptive Sonardyne kit is to applications in defence, energy and ocean science.
Enabling oceanography with Pressure Inverted Echo Sounders
My focus is ocean science, so of course I was most fascinated by the science applications for these systems. Let’s start with PIES. It’s an instrument for simultaneously measuring two-way travel time through the water column and pressure at the seabed. It can be configured for autonomous monitoring over many months and even years. It also has an embedded acoustic modem, allowing for data retrieval without recovery of the device to the surface. Combining two-way travel time and pressure-derived depth enables average sound speed in the water column to be determined. This has obvious marine seismic applications, reducing uncertainty in the seismic data, but the capability to measure two-way travel time also has applications within the field of ocean science.

Here, a PIES is used slightly differently. Oceanographers measure two-way travel time because it is related to historical water column structure and enables density profiles to be derived. Not too long ago a mass deployment of modem-enabled PIES was used to map local horizontal velocity and density fields in the extended Loop Current System in the Gulf of Mexico, as part of a project to understand the processes underlying the Loop Current System. This is a major oceanographic feature, which has implications for harmful algal blooms, hurricanes, trophic dynamics… the list goes on.
A key advantage of PIES, with its integrated modem, is being able to supply near real-time data for input into forecasting models. With these, Loop Current System forecasts can be deduced that will be beneficial to a range of activities, including oil and gas operations, hurricane forecasting, fishing and tourism. From that one project alone, it’s not hard to imagine how PIES could play an integral role in future leading ocean research.
A powerful tool for tracking and communications – Mini-Ranger 2

On to Sonardyne’s Mini-Ranger 2 USBL system – engineered for underwater tracking and communications of anything from towed bodies to autonomous underwater vehicles. This system, together with the wider Ranger 2 family of USBL systems, fits in perfectly in an age where the use of uncrewed data collection platforms, surface and underwater, is becoming more and more prevalent for the ocean science community. With accurate and consistent tracking of uncrewed vehicles, the water column and seabed can be surveyed, analysed and managed more efficiently and effectively, maximising efficient use of precious vessel time. Of course, robots are not the only thing Ranger 2 systems can track; divers and underwater instruments can be too, presenting the science community with a flexible tool for collecting their data with confidence.
Make your underwater vehicles go further with SPRINT-Nav
The last system I want to mention today is SPRINT-Nav. It’s a hybrid navigation instrument that tightly couples our SPRINT INS, Syrinx Doppler velocity log (DVL) and a high-accuracy pressure sensor in a single, and surprisingly small, housing. This combination provides unprecedented levels of navigational capability for remotely operated vehicles (ROVs), uncrewed surface vessels (USVs) and autonomous underwater vehicles (AUVs).
If it is high performance, accuracy and reliability you need for your uncrewed underwater or surface vehicle, SPRINT-Nav is absolutely the instrument to choose. From an ocean science applications perspective, longer navigationally accurate ocean survey operations, in the absence of external references, is ideal for data collection in remote areas. For a sector that is often constrained by funding availability, SPRINT-Nav could certainly allow more ocean research opportunities to be explored and ultimately seized.
Over the past three years, I have changed from being a Doctoral Researcher in Ocean Biogeochemistry to Business Development Manager for Ocean Science, here at Sonardyne. Yet one thing has remained constant – my appreciation for the need for observational oceanographic data. The oceans are of great biogeochemical, physical and socio-economic importance and therefore it is critical that they are understood. This includes an awareness of how they are changing and how they may respond to future activities and events. Hence, there is a great and urgent demand for oceanographic data. The power, innovation and possibilities presented by our instruments are already helping with satisfying this demand and will continue to do so as observational ocean science continues to advance.
Combined long baseline (LBL) acoustic positioning and inertial navigation system (INS) software from energy technology company Sonardyne has helped to support the latest phase of an offshore project northwest Australia.
The project is the first full use of Sonardyne’s Fusion 2 software and associated 6 ‘plus’ (6+) hardware in Australia, cementing the global adoption of the new survey and construction technology in the wake of field development projects across Europe, North and South America, the Middle East and Asia.
In this latest deployment, geo-data insights firm UTEC, the lead brand for Acteon’s Geo-services segment, used Fusion 2 software and 6+ hardware in support of full and sparse LBL operations to position and install a new subsea well gathering system being tied back to an existing facility.
“Fusion 2 vastly simplifies topside interfaces and simplifies use, because it does the job of three systems, in one,” says Edd Moller, Sonardyne’s Head of Energy. “When used with our latest generation 6+ hardware, including the industry standard Compatt 6+ transponders and vehicle-installed ROVNav 6+ transceiver, it enables more to be done with less equipment in the water. It can operate in full LBL arrays, where required, but, using the latest fast LBL mode, it can also reduce time on task. That’s because it can take advantage of the combined ranging and telemetry functionality of our 6+ hardware, which is enabled by our Wideband 3 digital signal protocol.
“Fusion 2 can also operate in sparse LBL arrays, reducing the amount of subsea hardware required during these operations, saving project costs but still with the same LBL positioning accuracies. Fusion 2 can also be operated in USBL-aided INS mode, allowing improved and fast updates of the vessels USBL system. It’s a truly flexible system for supporting any offshore construction or survey operation.”
[blockquote]Paul Barry, Country Manager – UTEC said; Following installation of five drill centre arrays for future structure installation we were able to use the SLAM calibration routine to integrate the wider area cut-to-length arrays using fewer Compatts than we would have normally. The SLAM calibration on the cut-to-length Compatts was done in parallel with the pre-lay survey as the ROV was passing along the route, therefore saving vessel time and reducing the carbon footprint of the project. [/blockquote]
Using various combinations of Sparse LBL aided INS and full LBL aided INS a total of 29 structures were installed. The ROV was docked onto the structures and the much faster and smoother aided INS position updates made for efficient structure installation operations.
Our successful, and continuing, use of the system was built on the comprehensive training in Fusion 2 and 6+ of our field personnel by Sonardyne and the supply of the Compatts and ROVNAV’s from Seatronics, the lead brand for Acteon’s Electronics and Tooling segment. The Seatronics supply required them to upgrade their Compatt and ROVNAV 6’s to 6+ functionality plus perform rigorous pre-mob testing.
UTEC’s use of Fusion 2 and 6+ hardware to generate vessel time-savings on this project is just one example of UTEC’s objective to safely manage the introduction of new technologies to benefit our clients on future projects around the world.”
Author: Chris Hammersley – Applications Project Manager
Why is BlueComm blue?
The general rule of thumb is whatever colour the water appears, that is the colour which will be least absorbed. Blue in clean water is the least absorbed electromagnetic wavelength, making it the obvious colour the lights in BlueComm should be using. But what about dirty turbid water I hear you ask? Well, dirty water tends to look brown/green. Maybe green would be a better solution for docks or estuaries like our Plymouth test facility? With the current level of LED technology we don’t believe so. Green LEDs just aren’t as efficient as Blue, so what we lose in absorption, we make up for in overall emitted light.
How does turbidity affect the performance?
Turbidity is the cloudiness or haziness of a fluid, meaning the turbidity of the water has an effect on the maximum operational range of BlueComm. As I’m sure you can imagine, there are a whole host of different particles in the water from sand to silt to microorganisms, each of which has a different effect on the light we transmit. Some particles absorb and some practices scatter the light.
Various scientific studies have shown open sea conditions to be consistently low turbidity. These results have been backed up by our own operations and trials in the Atlantic, Mediterranean and North Sea, with BlueComm 200 achieving >100 m range during each operation. This has shown us how BlueComm can be used to great effect in the open sea.

Moving into locations where the water doesn’t flow as well, like ports or in silty river estuaries, the quality of the water clarity decreases. As the quality of water clarity decreases, so does the maximum operational range of BlueComm. In these situations we would always suggest doing a survey of the local water quality using a blue light transmissometer so we can calculate what the possible maximum operational range would be.
One common question we’re asked is, “We operate in the open ocean, but what if an ROV stirs up a lot of silt?”. When an ROV stirs up silt it tends to be at a localised spot (10-20 m2) and not the whole operational area. Thus most of the water the light is traveling though is still relatively clear. During testing in a localised spot of turbidity has only had a small effect on the BlueComm’s maximum range.
How does ambient light affect the performance?
Fun fact: Your eyes are incredible in their ability to see during the day and night. During the height of a summer’s day, 1,000 Watts per square metre (W/m2) is being received from the sun yet during the night only 0.001W/m2. That’s a difference factor of a 1,000,000!
BlueComm produces an optical point source of 6 Watts of light, so it’s easy to see how that could get drowned out by the sun’s light emissions. Ambient light is the ambient noise of the optical world.
As you decrease the amount of ambient light, however, the range increases. So, BlueComm 200 will go from a couple of meters range in full sunshine to 150 m in perfect darkness. Typically, BlueComm 200 in open ocean shallow water with just moon light will achieve 100 m, whereas in darkness it will get to 150 m.
A Common question is, “We operate in the deep sea but how do ROV lights affect the performance?”. Although not as powerful as the sun, ROV lights can affect BlueComm 200. From experience, a Work-class ROV with either halogen or LED lights limits the range to ~40 m. To combat this we provide in-sync white light emitters to replace ROV lights. The in-sync white light keeps the full 150 m maximum range available.

However, we understand our in-sync white light emitters can’t replace all the halogen lighting on an ROV, so to help combat the ambient light problem we released BlueComm 200 UV. BlueComm 200 UV, as the name suggests, uses UV light (not of the dangerous variety) rather than Blue light. Although the maximum possible range will be reduced to 80 m, it will operate at that range in all deep-water ROV lighting conditions.
How stable is the data?
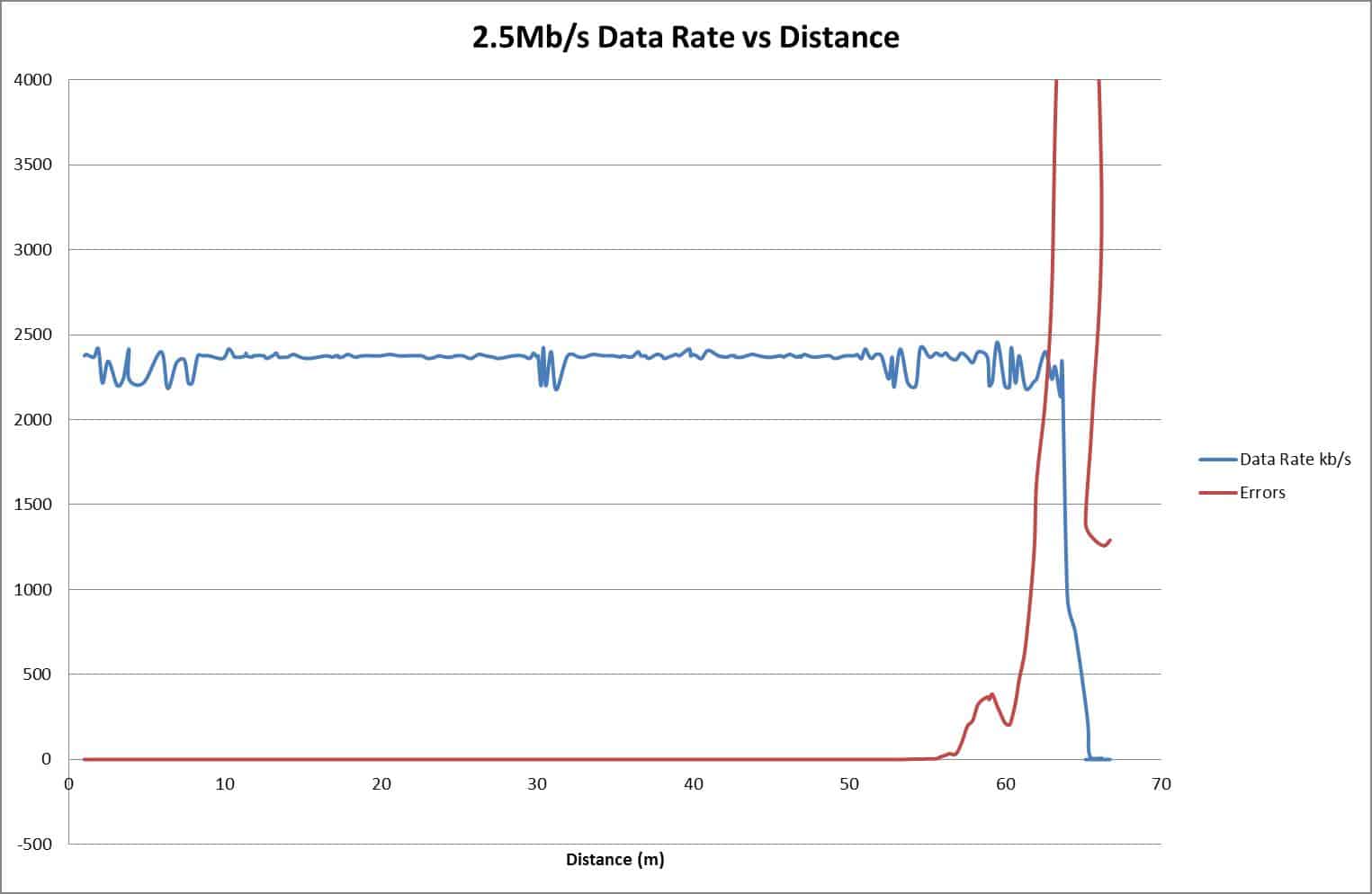
As explained above, the maximum operational distance is defined by both turbidity and ambient light. The below graph shows some practical data from a trial. Note the maximum range has been limited by both ambient light as the operations were at 2.5 m deep during the night and turbidity to 70 m. The graph shows how the data transfer performance changes over distance.
The blue line is the data rate between the two BlueComm 200s under test. As can be seen, it is constant and stable up to 60 m. At 60 m the number of photons being received gets close to the ambient light level. The system starts to struggle to distinguish between ambient light and the BlueComm transmission. The red line shows how the errors increase quickly at the maximum distance and the data rate reduces dramatically.
If you would like to find out more about our BlueComm, you can read more here.
If you would like to talk to us about how BlueComm could work for your next project, please get in touch.