
From array design to deployment support, data harvesting and processing, we provide you with a full subsea monitoring service.
Measuring millimetric movement matters
When your operations, assets and income stream are all based subsea, monitoring their movement, and that of the environment around them, matters.
Whether it’s seismic activity, pipe, riser or mooring movements, seabed deformation, or currents, temperature and turbulence around your assets, timely, reliable monitoring data can inform your operations, help to avoid accidents and save you money.
0
+
Monitoring instruments
Exports to
0
countries
Achieved in
0
carbon neutrality

Seabed and seismic
Developed over more than a decade and in use globally by the energy sector, our ‘game-changing’ seabed deformation monitoring technologies offer critical new understanding of seafloor movement and its impact on installed structures and reservoirs, including those used for carbon storage.
What our tech can do for you
•10 Years – Long-term unattended deployment and monitoring of the seabed
•USV or AUV – Remote data acquisition for safer, greener survey operations
•9,000 bps – Fast and robust communications performance
•6000 m – Working depth, perfect for deepwater operations
Similar to seabed deformation, seismic movement monitoring is important for your ocean science and energy operations. Measurement of tectonic plate movements can inform scientific research and alert energy operators to potential hazards.

Currents
The water around your assets can affect their performance and longevity. Currents, temperature, turbidity and chemical composition can all play a part. Monitoring, whether short or long term, can inform your operational decision making. Developed using our decades of experience, our Origin acoustic doppler current profiler (ADCP) provides you with reliable, accurate and timely current and wave data. It’s built in acoustic modem gives easy access to data and rechargeable batteries give greater deployment lengths and quick turnaround redeployments.
During your operations, you can gather and transmit your logged data wirelessly, using our sixth generation (Sonardyne 6G®) acoustic communications platforms onboard unmanned surface vessel (USV) or autonomous underwater vehicle (AUV) platforms or from any crewed vessels using or Ranger 2 systems or Dunker 6 transceiver.
Structure and Pipeline
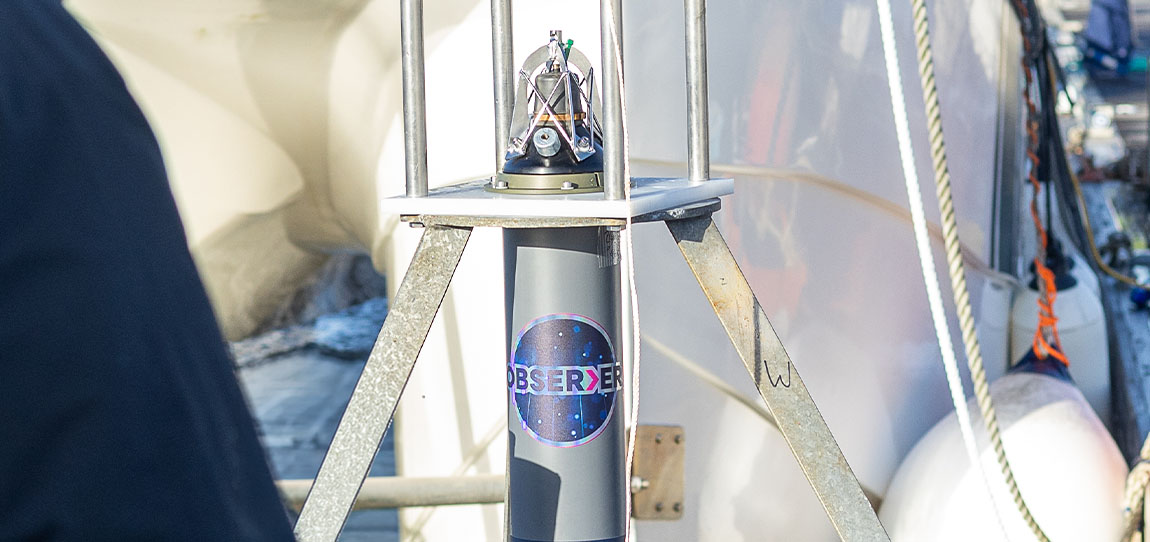
Observer delivers intelligent subsea integrity monitoring in a single, easily deployed instrument built for long‑term offshore operations. Combining low‑power electronics, onboard analytics and wireless communications, Observer provides continuous insight into how your subsea assets are truly behaving. From pipelines and risers to moorings and umbilicals, it enables early identification of fatigue, movement and environmental effects—reducing risk, unplanned intervention and lifecycle cost. Flexible sensor interfaces and standardised ROV‑deployable mounting options ensure straightforward integration with your existing infrastructure and monitoring strategies.
At the core of Observer is powerful onboard processing that analyses data at source, transforming high‑resolution sensor measurements into meaningful, actionable intelligence. Intelligent power management supports extended deployments, while data access remains on demand. Information can be retrieved acoustically using trusted Wideband 2 digital communications, or via high‑speed cabled or optical interfaces when larger datasets are required. With configurable logging regimes that can be adjusted during deployment, event‑based detection and secure redundant data storage, Observer delivers the reliable, real‑time integrity insight needed to support confident, proactive subsea asset management.

Wellbore monitoring
Acoustic Data Logger delivers reliable, long-term wellbore monitoring backed by over 30 years of proven field performance. This robust system reads multiple gauges at predefined intervals, securely stores data within corrosion-resistant super duplex stainless steel canisters, and transmits information acoustically on-demand to surface vessels. Compatible with both IWIS and non-IWIS gauge cards from leading manufacturers, the logger operates for up to three years at standard sampling rates, with extended deployments easily supported through external battery packs.
Engineered for versatility and durability, the system is ROV-portable to 3,000 meters depth, making it ideal for both short-term well appraisals requiring frequent readings and multi-year permanent installations on wellheads. Our latest 6G and Wideband 2 acoustic technology enables rapid, accurate retrieval of large data volumes at surface. For suspended or abandoned wells, our high-availability acoustic modems integrate seamlessly with third-party monitoring solutions, including electromagnetic and through-casing technologies, ensuring continuous data access throughout your well’s lifecycle.










Fetch
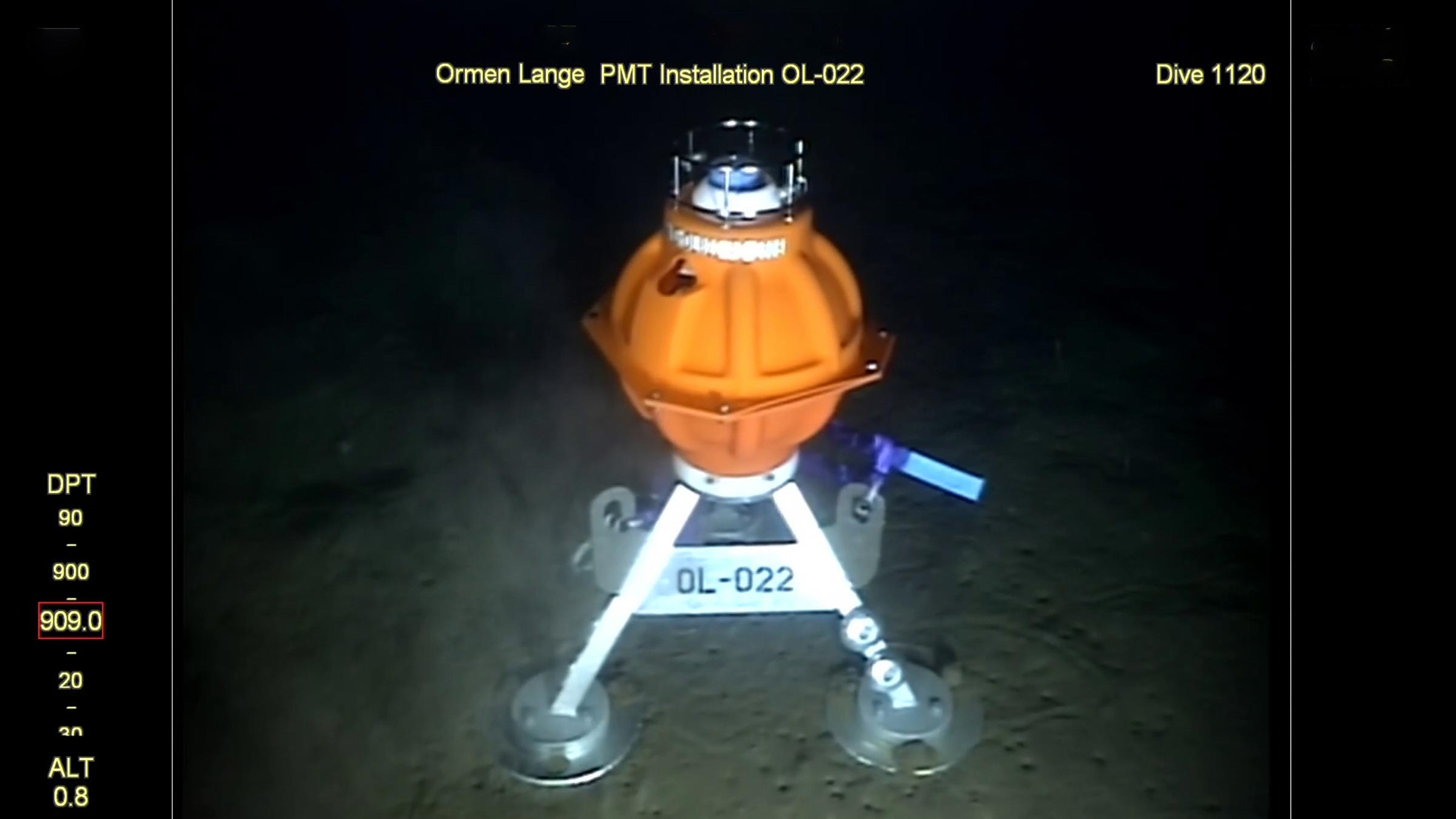
Fetch pressure monitoring transponder (PMT) instruments are subsea sensor logging nodes that measure long-duration seafloor movement, laterally and vertically. Fetch PMTs can take hundreds of thousands of highly precise, stable geodetic observations over long periods of time; safely log the data to internal memory; and, on command, wirelessly transmit it up to the surface.
With the addition of our in-situ pressure sensor calibration capability, Ambient-Zero-Ambient (AZA), we address the inherent drift that pressure sensors experience over time. That means your instruments can remain on the seabed, and generate accurate data, for up to 10 years – without any need for periodic retrieval for recalibration.
SMART – Asset monitoring and analysis transponder
SMART brings together low power electronics, data logging, subsea data processing and acoustic telemetry into a single, easily deployed instrument that’s suitable for a wide range of long duration, remote monitoring campaigns across energy and science.
• Battery options to support campaigns in excess of 10 years
• Can be deployed and recovered using ROV
• 3,000 m standard depth rating; options for 7,000 m
• Onboard logging and processing of data; offloaded acoustically on demand
• Built on our low power 6G hardware platform and Wideband 2 digital signal architecture for reliable acoustic performance in noisy conditions
Origin ADCP
Our Origin family of ADCPs represent the latest in cutting edge underwater profiling technology. Able to analyse mean currents, waves and turbulence, and integrate with external sensors to provide pH levels, temperature and other data; Origin delivers comprehensive, reliable and timely data sets for your underwater operations.
With on-board Edge data processing and built-in acoustic modems, Origin can also process and deliver your data in almost real-time. Available in two models, Origin 65 for deep water profiling and Origin 600 for near and inshore waters, there is an Origin ADCP to suit your operation.
Acoustic Data Logger
Built on more than 30 years of successful installations, Acoustic Data Loggers provide you with the power to read multiple gauges at predefined intervals, securely store the received information within the unit, then transmit it acoustically through the water column to the surface on-demand.
Experience the power of seamless, long-term well monitoring with our cutting-edge Acoustic Data Logger. Unlock unparalleled insights, optimise your operations, and take your well management to new levels of efficiency and success. Introducing our state-of-the-art Acoustic Data Logger – the ultimate solution for reliable, long-term well monitoring.
Covelya Group aim for a safer, more sustainable world through engineering excellence and innovation. Sonardyne are part of the Covelya Group, along with our sister companies. We are part of a group of technology companies, working in Science. Energy, Environment and Defence that develop, manufacture, sell and support instruments, systems and solutions worldwide.