Precise, seamless, robust
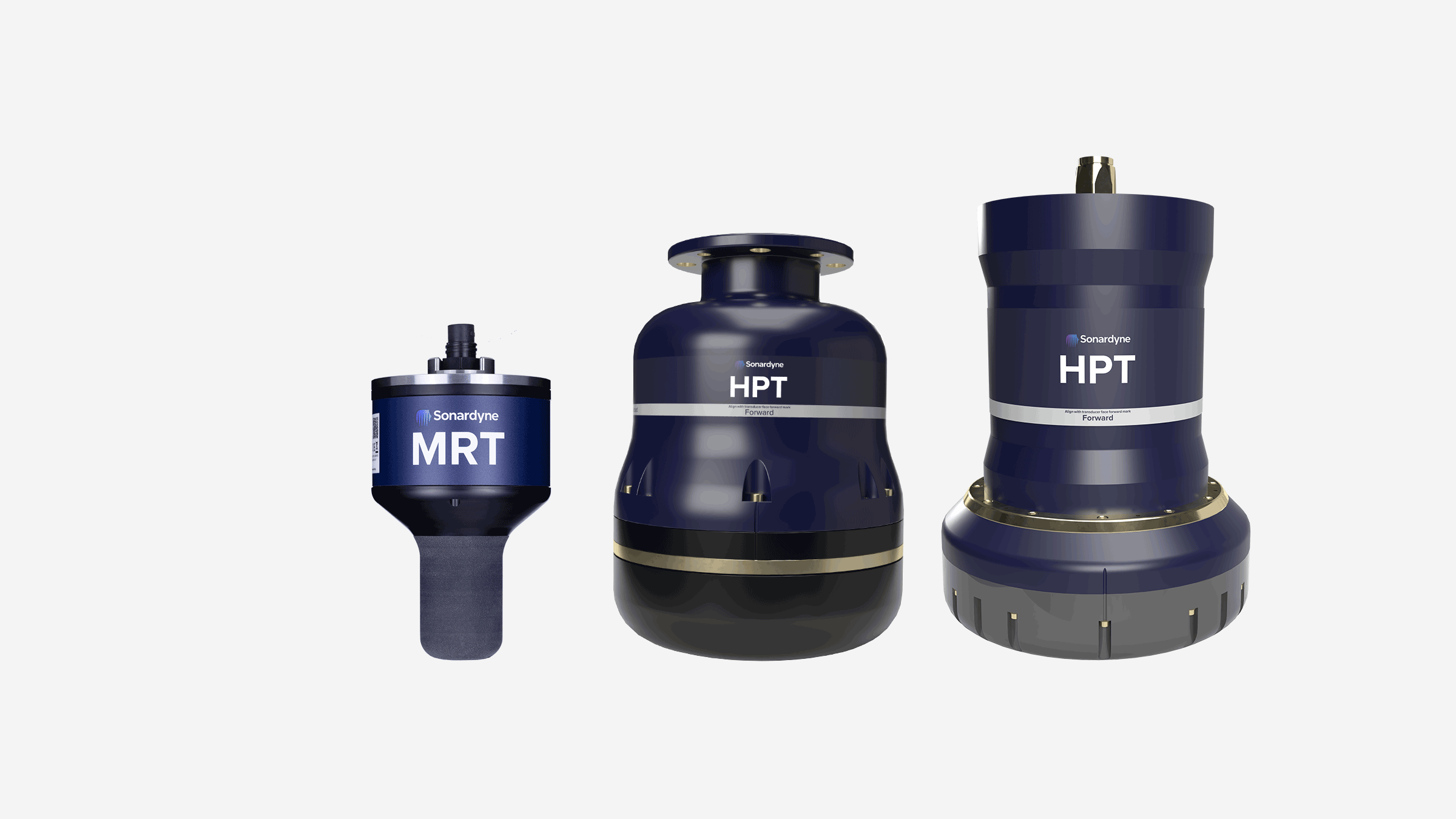
Precision engineered, Marksman leverages the strengths of both USBL and LBL acoustics, providing enhanced precision and range redundancy through seabed transponder networks.
Marksman seamlessly integrates with your existing DP system, whether you’re running GE, Kongsberg, MT, Navis, Rolls-Royce or Wärtsilä.
Robust and reliable dual independent hardware configurations provide redundancy to ensure your critical operations can continue even if part of the system becomes unavailable. There is also option of operating in triple redundancy configuration through the augmentation of our inertial navigation technology – known as DP-INS.
DP-INS has been developed to meet regulatory requirements which state that deep water drilling units must be equipped with three independent positioning reference inputs to their DP system. Traditionally, an acoustic positioning system and two separate GNSS systems are used.
However, vulnerability remains should the acoustics be affected by aeration and noise and both GNSS systems simultaneously affected by signal disruption. The latter is particularly common around equatorial regions and during periods of high solar radiation. Marksman removes this vulnerability by reducing the reliance on GNSS.