Last week we introduced Mike Ellis, our (re)new(able) guy! Now it’s time to introduce the second of our recent new starters, Aidan Thorn. If you’re in marine robotics, you’ve probably already come across him. He’s joined us to help us further support the global energy transition, ocean science and defence through advanced underwater robotics as our Business Development Manager for Marine Robotics.
I’ve now been Sonardyne’s Marine Robotics Business Development Manager for three months. It’s been quite the whirlwind. I’m not long back from the Marine Autonomy and Technology Showcase at my previous haunt – the National Oceanography Centre (NOC). This was having also attended the Pathways to Autonomy event at London International Shipping Week and Ocean Business, all of which have been in person events (finally!), as well as hosting my first Sonardyne webinar. Each one reaffirmed why I took this exciting role and why now is such an exciting time for marine robotics. “Exciting” doesn’t feel like a strong enough word to describe what’s happening in our industry within marine robots.

When I came into the industry, more than 20 years ago, as an apprentice at the NOC, they had one autonomous underwater vehicle (AUV), the Autosub. When I had walked around my first Oceanology International in the very early 2000s, there were a few unmanned underwater vehicles (UUVs) and not an uncrewed surface vessel (USV) in sight. Times have definitely changed.
The prevalence of marine robotics
During MATS, the NOC celebrated 25 years of Autosub science missions and we were told of their ambitious plans to deliver increasingly complex science using marine robots. When I was walking the show floor at Ocean Business last month, it was very obvious how prevalent marine robots have become in marine operations, nearly every stand either referenced or actually had some type of marine robot featured somewhere. It’s also not just about AUVs, there are now “UxVs” in all shapes, sizes and capabilities on display and operating in our ocean.
One of the drivers, and a topic that no one could have missed over recent weeks, while COP26 was running in Glasgow, is climate change. It’s a significant driver across ocean going sectors, to the use of marine autonomous systems towards goals of reaching net zero carbon emissions.
[blockquote]”Where the focus for marine autonomy has historically been around getting into areas that are difficult/impossible to send humans or to remove humans from the dull, dirty and dangerous aspects of operating at sea, wider adoption is now being driven by their environmental benefits”[/blockquote]
Marine robotics no longer just exist for the experimental or difficult to reach operations. Replacement of heavy fuel burning ships for tasks like inspection, operation and maintenance of offshore infrastructure, data harvesting from subsea nodes and environmental impact assessment is increasing. Operations like autonomous logistics transportation are fast becoming a tangible reality.
So, it’s definitely an exciting time to be involved in the world of marine robotics. It’s great to see real-world applications of the technology, solving real challenges for users. But there are still vast challenges to solve before we will see all of the ambitious plans and conversations at conferences and exhibitions put into practise.
Collaboration around technologies, skills and regulation is needed to enable mass adoption and scale-up, as was recognised at London International Shipping Week’s Pathways to Autonomy event, and was also a theme in the questions from delegates at MATS. It’s helping to solve these challenges that makes me most excited about my new role here at Sonardyne.

Enabling marine autonomous systems
In terms of robotics, we enable marine autonomous system tracking, navigation, command, control and communication. Our equipment and systems are key enablers for the most exciting marine robotics developments and operations happening in our waters today, and into the future. That ranges from NOC’s latest under-ice AUV to Fugro’s Blue Essence and Blue Volta combined USV/electric remotely operated vehicle (ROV) combination, to Ocean Infinity’s Armada fleet – and that’s just scratching the surface. There are so many more companies and organisations that we’re engaging with on marine robotics projects that cut across our three core market areas: science, defence and energy.
As part of the wider Covelya Group, we have partnerships with incredible companies that provide imaging, machine learning and AI capabilities, ensuring that data is converted to useable information for end users.
But it’s not just about our equipment and systems. In an amongst all the events and meeting customers and users, I had the privilege of spending a week in Plymouth with the Sonardyne training team. The level of detail and care the team put into training users of our equipment to ensure they have the skills to operate it in real-world environments is inspirational. We’re already looking at how we can use this capability and experience to seed knowledge into the next generation of ocean technology operators. This is the generation that’s going to be operating and interacting with marine robotic and autonomous systems from day one.
Providing complete MAS solutions
We’re looking to provide a number of complete solutions. For wider adoption of marine autonomous systems (MAS) to take place, the market will need standardised operating methods. It’s my ambition that Sonardyne’s complete solutions set the standard for MAS command, control, tracking, navigation, positioning. We are not only interested in working with our group companies to achieve this, we are interested in engaging with all of you.
We want to build greater intelligence into our payloads so that they can identify and diagnosis their own faults or faults in the wider marine autonomous system. We are already doing things like building edge computing into our payloads to enable them to ensure that they’re feeding the pertinent data to the user in real or near real time. We are also collaborating with the likes of the UK’s Defence Science and Technology Laboratory (Dstl) and Thales, here in the UK, on secure methods of communications between robotic platforms to enable interoperability.
Either as a company, as a group of companies or in partnership with others, we are looking to provide solutions for the complete marine autonomous system, from packages that go onto the robot themselves to packages that help the robot to launch, be recovered, recharge, dock, transfer data and so on.
I’m looking to start those conversations now about how we can work with you to partner on integrations or to understand your operational challenges and help to solve them with you.
Author: Chris Hammersley – Applications Project Manager
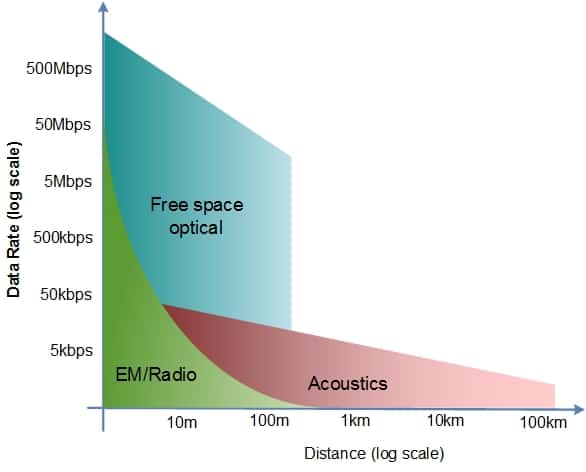
Water is an incredibly hard medium to communicate through. In air, we are all used to having almost unlimited data in our pockets and being able to stream the latest YouTube cat video at a moment’s notice. However, go just a few metres underwater and all that stops. Water absorbs, attenuates and tempers just about any signal travelling through it. This means for many years, subsea wireless communication has been limited to speeds which make a dial-up connection look fast.
For years, the market has concentrated on subsea acoustics development, because it was the only wireless technology available. Acoustics still provides the best operating range of any available technology, but at present the majority of deep water (3-4 km) acoustic modems are limited to around 5-10 kb/s while some short-range shallow water offerings can go up to 100 kb/s. Progress is being made in improving acoustic solutions, but the possibility of a Mega bit per second (Mb/s) acoustic link is still very much in the conceptual stages.
Underwater communications alternatives to acoustics
The subsea market has learned to live with such limitations, either tethering equipment or reducing the data sets to the absolute minimum for acoustic transmission. However, as technology advances, alternatives to the acoustic pressure wave are becoming a reality.
Our preferred alternative is free space optical communications. While mathematical models show the maximum theoretical communication distance is limited to several hundred meters, the possible data rates can be incredibly high, as shown by the current optical fibre speed record standing at over 1,000 Gb/s.
With recent improvements in silicon technology, high power LED technology and advanced optical sensors, it was possible to see how wireless broadband speeds might come to the subsea world. This research led to Sonardyne investing in subsea free space optical communication. Together with our partner Lumasys, we have been developing our BlueComm optical communications range.
As with any technology, there are trade-offs during the design between different performance criteria, which is why we now have a range of our BlueComms, each designed around a different maximum performance characteristic.
There are two versions of our BlueComm 200 available, operating at different wavelengths.
BlueComm 200
BlueComm 200 operates using visible light. Visible light can travel significant distances through water meaning that BlueComm 200 has a range of up to 150 m. This makes it an excellent tool for wireless transfer of video and direct control of a vehicle in AUV applications. It is also ideal for data harvesting applications. Using BlueComm 200, an AUV or ROV can transfer large volumes of data up to ten thousand times quicker than acoustics.
BlueComm 200 UV
BlueComm 200 UV works just like BlueComm 200, however it uses a shorter wavelength in the ultra-violet spectrum. This means that it can operate even in the presence of artificial lights. Operating in the UV spectrum, BlueComm 200 UV can work at ranges of up to 75 m. It is best suited for ROV or AUV applications that require the use of lights, for example, when recording video.
Underwater communication with lasers
We also developed a variant that uses two rapidly modulated off-frequency lasers to produce simultaneous bi-directional communications. The equipment is optimised for peak data transfer performance with transfer speeds of 500 Mbps being achievable. This is excellent at large data offloads from deployed sea bed nodes or fast ‘fly-by’ data collections by field resident AUVs.
If you would like to find out more about our BlueComm, you can read more here. Or read our blog about the science behind BlueComm here.
If you would like to talk to us about how BlueComm could work for your next project, please get in touch.
We’ve had some new starters in our business development team here at Sonardyne over the past couple of months. They’ve joined to help us further support the global energy transition, to further ocean science and support advanced underwater robotics. We thought it was time we introduce them. First up is Mike Ellis, our new Business Development Manager for Offshore Renewables.
Well, it’s only been a few weeks, but it already feels like longer – in a good way!
I didn’t have to give joining Sonardyne too much thought, especially in a role that is going to help me play a part in the energy transition, changing how we use our planet’s resources. It’s a subject that’s become increasingly close to my heart in recent years, as it’s become clear that we need to transform our energy system, for us and future generations. The proliferation of offshore renewable projects, and the change that comes with that, brings about new and evolutionary technological requirements, such as autonomous platforms and the harvesting and automation of big data. It’s a critical, but also exciting space and one that’s set to grow immensely over the coming decades.
Much of my adult life has always been in and around marine activities. It all started after I got into diving while backpacking in my early 20s. Seeing the Great Barrier Reef, sites in Southeast Asia and the Red Sea got me hooked on the ocean. I wanted to work in an industry based around oceanic activity, but also give me a relatively good income. So, I became a hydrographic surveyor and I’ve never looked back.
It’s a career that has taken me around the world, including wreck hunting using advanced multi-beam systems and technologies like the Hugin autonomous underwater vehicle, when it was still a new piece of kit in the surveyor’s toolbox. After several years focused on survey operations with Fugro and Gardline, I joined EMGS in the late 2000s; a Norwegian company that made big waves in the oil and gas exploration sector with their advanced marine electromagnetics proposition. In more recent years I have taken on more business-focused roles, working with younger companies, including the implementation of automated data acquisition using robotics into the offshore renewable sector.

For a while now, I have wanted to make a bigger impact in renewables, not least offshore wind. Sonardyne has been ubiquitous throughout my professional career and while a large part of that has been oil and gas focused, Sonardyne’s systems are omnipresent in supporting work in offshore renewables. Whether that’s in navigation and positioning systems for survey, construction, and inspection operations; sensing, imaging and monitoring during consenting and operations and maintenance phases; or wireless communications and remote operations, for data-harvesting or communicating between autonomous platforms. Now that I’m part of the team, I’m enthusiastic to see that the renewables industry is increasingly investing in these technologies as key ways to help improve reliability, efficiency, mitigate HSE and operational risks, and reduce levelized cost of energy (LCOE).
I also see some particular challenges the industry has to face, both across fixed bottom wind farms and, as it emerges to a commercial offering, floating. For example, cables and their protection systems have challenges. Ensuring cables remain in useable condition over 25-30 years is all about understanding how they’re effected by the dynamic environments they’re in. We need to acquire bigger data sets, yet gain more value from analysis tools, including digital twins.
These are just a few of the discussions I’ve been hearing in my first few weeks at Sonardyne. It’s been a bit of a whirlwind since my start in late September. I’ve visited both Global Offshore Wind event in London, chatting to developers and the supply chain about their needs, and Ocean Business, where I met customers and industry colleagues. I’ve also been able to enjoy a week at our training and testing facilities in Plymouth, getting on the water and getting hands on some of the latest Sonardyne systems.
I’m also looking forward to working with our sister Covelya Group companies – EIVA, Voyis and Wavefront. All these companies harness multi-application marine products, including advanced survey and processing software and underwater imaging. Integrating these with our positioning and navigation technologies has already proven to be hugely advantageous, creating enhanced solutions – reducing integration complexity while improving data – and I can only see further opportunities for these.
What’s most exciting is that, for a majority of the subsea challenges out there in the offshore renewable sector, we at Sonardyne, and the wider Covelya Group, will have the solutions.
Underwater obstacle avoidance technology from maritime defence technology companies Sonardyne and Wavefront Systems has been successfully demonstrated on board an extra-large, uncrewed, underwater vehicle (XLUUV) built and operated by Plymouth-based MSubs.
The demonstration of the Vigilant forward looking sonar was part of the first phase of the UK’s Defence and Security Accelerator’s (DASA) ‘Uncrewed Underwater Vehicle Testbed – Opportunity to Integrate’ competition, run jointly with the Royal Navy and the Defence Science and Technology Laboratory (Dstl).
The DASA competition is focused on testing and validating commercial-off-the-shelf technologies (COTS) sensors and payloads, like Vigilant, to help the Royal Navy understand the future roles for XLUUVS for surveillance, reconnaissance and anti-submarine warfare, and deliver new capabilities to the Royal Navy years earlier than otherwise be possible.
Vigilant, developed by Wavefront Systems and manufactured and commercialised by Sonardyne, is a navigation and obstacle avoidance sonar for ships, uncrewed surface vessels (USVs) and underwater vehicles. It provides crews with automated long-range detection of objects in the water column, showing them where it is safe to navigate and alerting them to potential underwater dangers that could result in a collision or grounding.

The system has two operating modes. In 3D mode, Vigilant produces accurate 3D bathymetry and colour-coded depth imagery out to 600 m and to depths down to 100 m. In Sonar mode, Vigilant processes the intensity of the acoustic data to extract long-range positional data out to 1.5 km and over a 120-degree field of view. The sonar returns are used to generate alerts highlighting the presence of a navigationally relevant obstacle.
For the trial, the system’s sonar projector and receiver array were mounted in the bow of the 9 m-long MSubs’ S201 XLUUV. At just 31 cm-wide and weighing only 14 kg in air, Vigilant is easy to retrofit on a wide range of platforms including ships, USVs or, as in this case, an XLUUV.
As part of the demonstration, the XLUUV was programmed to travel beyond the breakwater outside Plymouth sound. Vigilant was used to create a bathymetric map that was used by the XLUUV to navigate. The data was also overlaid over existing charts of the area, demonstrating the higher resolution provided by Vigilant.
Ioseba Tena, Head of Defence at Sonardyne, said: “We’re delighted to be playing a role in helping the Royal Navy and programme partners to test and evaluate technologies that will help the UK stay ahead of her adversaries in the underwater battlespace.
“Seaborne collision avoidance is a vital consideration for autonomous and uncrewed naval platforms. Vigilant can be integrated into these ocean robots to provide essential information to autopilots and command and control systems, to aid safe navigation and manoeuvres around hazardous obstacles.”
[blockquote author=” Bret Phaneuff, Managing Director at MSubs”]”The data from Vigilant is truly impressive and transformative. It provides our XLUUV with instant situational awareness, which will help it avoid obstacles and, with some further integration, help optimise navigation trajectories to improve our performance and increase our endurance.”[/blockquote]
Subsea technology specialist Seatronics has been announced as the first customer for Sonardyne’s new SPRINT-Nav Mini Navigator, launched just one week ago.
Seatronics has purchased the technology, the world’s smallest hybrid acoustic-inertial navigation instrument, for its VALOR remotely operated vehicle (ROV), itself designed to be the smallest, most powerful and capable inspection class ROV in its category.
SPRINT-Nav Mini Navigator will provide VALOR with accurate, precise and robust navigation and control, supporting Seatronics in its goals to further extend the boundaries of remote operations with tasks ranging from underwater inspection in lieu of dry-docking (UWILD) through to mine identification and destruction.
SPRINT-Nav Mini combines an INS, AHRS, pressure sensor and DVL in a single subsea housing depth rated to 300 m or 4,000 m and weighs as little as 3.6 kg in air. The new Navigator variant extends the capability of the Guidance model introduced in 2020, by calculating and providing the position of a remote, autonomous or piloted underwater vehicle, or uncrewed surface vehicle, in addition to its velocity, depth and attitude.
The cost and complexity of integrating third-party sensors is a key consideration for robotic vehicle builders and owners. SPRINT-Nav Mini addresses these needs with a compact, all-in-one design that requires only one cable connection, is supplied with a full integration guide, and is cheaper than the separate sensors it replaces. And unlike other MEMS-based sensors, SPRINT-Nav Mini’s performance is not impaired by magnetic interference when operating close to structures such as an underwater dock.
VALOR already offers an advanced capability for its size, with a 40Gbp MUX capacity allowing it to accommodate the most modern, high bandwidth survey sensors. Equipping it with SPRINT-Nav Mini Navigator further differentiates it from similar-sized platforms, providing a significantly more flexible, configurable inspection platform that can undertake a variety of tasks that would typically be associated with much larger ROV systems.
[blockquote author=” Derek Donaldson, Seatronics’ Group Managing Director”]”Specifying payload sensors for a vehicle like VALOR often requires a trade-off between accuracy, performance, price and ownership. SPRINT-Nav Mini offers both the survey positional accuracy our clients are looking for, and a small form factor that we can fit and put straight to work. Another key reason for investing in SPRINT-Nav Mini is our ongoing relationship with Sonardyne. We knew that we would be fully supported in our concept to push the boundaries of remote operations from a small ROV solution by the Sonardyne team. This is critical when adopting new technology for a new platform”[/blockquote]
Jose Puig, Regional Sales Manager, Asia, at Sonardyne, says, “VALOR has been designed to be a versatile platform in terms of its operability, including remote operation, over-the-horizon control combined with supervised autonomy for enhanced inspection experiences. SPRINT-Nav Mini Navigator will support those operations, whether that’s from a quayside, vessel or uncrewed surface vessel (USV), providing a flexible solution to Seatronics’ customers.”
Underwater intruder detection technology from maritime security specialist Sonardyne has been chosen to protect a string of naval facilities and critical national infrastructure in the Middle East.
Sonardyne’s Sentinel Intruder Detection Sonar (IDS) will be deployed across a number of fixed and floating assets to provide perimeter and mobile protection from threats, including unauthorised divers and unmanned underwater vehicles (UUVs).
More than ten Sentinel sonar systems will be used across the naval sites as part of a 360 degree NiDAR surface and sub-surface waterline surveillance system, developed and supplied by Sonardyne’s long-term maritime security partner, MARSS Group. Integrated into the NiDAR C2, the Sentinel arrays, create some of the largest ever fully integrated underwater security shields around marine infrastructure, delivering a security layer covering in excess of 8 sq km.
In addition to this significant order, a further order for multiple Sentinel sonar systems will also be supplied via MARSS Group in the third quarter of 2021 to protect a vital piece of coastal-facing national infrastructure. A further separate order, with an undisclosed client, will see another Sentinel system used on a vessel for the protection of offshore infrastructure.
Sentinel is the most widely deployed commercial off-the-shelf (COTS) underwater intruder detection sonar technology on the market, with more than 150 installations world-wide. Its proven ability to discriminate between genuine targets and non-threats, such as large fish or pleasure craft, in a wide range of operational environments, makes it the ideal choice for high value or strategic assets such as harbours, jetties, ports, critical national infrastructure and vessels at anchor.
[blockquote author=” Rob Balloch, VP of Sales at MARSS”]”Sentinel’s proven track record, scalability, reliability and ease of use is exactly what our client needed. MARSS Group has partnered with Sonardyne over many years to integrate our NiDAR system into Sentinel to enhance situational awareness around ports, providing vital protection, delivering over 50 fully integrated sonars.”[/blockquote]
Ioseba Tena, Sonardyne’s Head of Defence, says, “As we have seen all too frequently in recent months, port and vessel protection from water borne threats is now more important than ever. With our unrivalled installation track record, our deep experience working in the Middle East and our knowledge and expertise in system integration and easy to use interfaces, we’re confident that the customer’s NiDAR-Sentinel solution will deliver the surveillance capability they need across their assets.”
Energy, defence and science marine technology company Sonardyne has introduced a range-topping model of its hybrid, underwater and surface vehicle navigation platform, SPRINT-Nav Mini.
The new Navigator version, available to order from today, extends the capability of the Guidance model introduced last year, by calculating and providing the position of a remote, autonomous or piloted underwater vehicle, or uncrewed surface vehicle, in addition to its velocity, depth and attitude.
Small in size and low in power, SPRINT-Nav Mini is engineered to provide accurate, precise and robust guidance, and also survey and inspection capabilities, for vehicle platforms that would normally not be able to host high-end navigation systems. These include observation-class ROVs, low-logistic AUVs, manned submersibles, swimmer delivery vehicles and USVs operating in shallow waters.
With field-proven technology transferred from Sonardyne’s popular SPRINT-Nav product line, the Mini family combines an INS, AHRS, pressure sensor and 500 kHz DVL in a single subsea housing that is just 215 mm-high, 149 mm in diameter and as little as 0.7 kg in water; smaller, lighter and lower power than any other competing technology in the same class, and lower in cost than the individual vehicle sensors it replaces.
SPRINT-Nav Mini continues to work even in challenging environments, such as around surface structures and GNSS denied environments, providing a continuous stream of latitude and longitudes, orientation, velocities, depth and altitude at up to 200 updates per second to a vehicle’s primary control system.
Available in 300 m and 4,000 m depth options, with a class leading maximum DVL altitude of up to 200 m, all SPRINT-Navs are supplied pre-calibrated from the factory, enabling users to install it and get to work easily and quickly. Existing owners of SPRINT-Nav Minis can upgrade their Guidance units to the new Navigator version, remotely in the field.
[blockquote author=” Aidan Thorn, Business Development Manager, Marine Robotics at Sonardyne”]”It’s an incredibly exciting time for developers and operators of small ROVs, AUVs and USVs with transformational technologies like our SPRINT-Nav Mini Navigator being a true enabler for safer, more efficient and cleaner operations across the maritime space.” He added: “The technology platform is low risk and field proven. This new flagship model will enable vehicle manufacturers and operators to enjoy all the benefits of Doppler inertial navigation from a single instrument. What I like is the simplicity, one unit that’s simple to integrate and easy to operate, leaving more space and power for other data collection payloads. And that ultimately means more capable vehicle for the user”[/blockquote]
Our latest and smallest Ultra-Short BaseLine system Micro-Ranger 2 is an ideal one-box solution for use from any waterside location or vessel, including RHIBs and small survey vessels. Specialist marine archaeology company MSDS Marine has been testing the new portable system out on one of its latest projects; diving operations on the Northumberland.
On December 7, 1703, an extreme weather event tore through central and southern England. Now remembered as the “Great Storm of 1703”, it caused untold damage, not least to ships, many of which were blown hundreds of miles off course or, worse, wrecked. During the storm, which lasted 13 days in total, more than 1,000 seamen died on the notorious Goodwin Sands, off Deal, Kent, alone. Today, we know the location of a number of these ships, which remain wrecked on the seabed, but in many cases, due to the nature of the shifting sands, they’re either often further buried or exposed and at risk of deteriorating and parts being washed away.
This is the case for the wreck of the Northumberland, a 70-gun, third-rate ship of the line, launched in 1679 in Bristol, and rebuilt in 1702 at Chatham, only to be wrecked on the Goodwin Sands with the loss of 253 crew a year later. In 1979, 300 years after she was launched, the site of the wreck was found as part of an investigation by local divers of more than 300 net fastenings recorded by an East Kent fishing family.

Since her discovery in 15-20 m water depth, and designation as a Protected Wreck, a number of repeat multibeam (MBES) surveys have been carried out over the site of the Northumberland and it became clear that the moving sandwaves of the Goodwin Sands had moved to such an extent that the wreck was at high risk of being completely uncovered and was therefore at risk of deteriorating and parts of it washing away in the tide.
Historic England commissioned Pascoe Archaeology Services (PAS) to undertake monitoring on the site to identify new areas of wreckage that may have been exposed and to monitor already exposed areas, to aid in their future management of the site. To support this work, PAS contracted in MSDS Marine, a marine archaeological company which specialises in archaeological diving and survey work to assist with the diving operations.
It was clear to MSDS Marine that the work would benefit from the use of a high quality underwater tracking system, to enable the accurate recording of the positions of newly exposed parts of the ship, but also to guide divers to features identified on the MBES around the site, which often suffers from poor visibility. They would also be working from a day boat (a 10 m-long Blyth Catamaran, Predator), so it was a great opportunity to put Sonardyne’s latest, completely portable, one-box Ultra-Short BaseLine (USBL) acoustic positioning solution, Micro-ranger 2, to the test.
The solution
Acoustic tracking works by using sound to measure the range and the bearing of a beacon from a transceiver fixed to either a boat or fixed structure such as a pontoon. Combining this information with a GPS position allows for real world positions of divers, ROVs or subsurface assets, to be determined.
[blockquote author=” Mark James, Operations and Technical Manager at MSDS Marine”]”USBL tracking has been used in marine archaeology for a number of decades, but has often required specialist knowledge, expensive equipment, and suitable vessel mounts for all the components. The introduction of Sonardyne’s Micro-Ranger 2 system in 2018 provided an entry-level USBL system that could be deployed from almost any platform and track up to ten beacons (on divers or ROVs) with an out the box slant range accuracy of 5% (2.5m at 50m range). The system is supplied with all the components, including the topside unit, transducer, transponders, and a GPS antenna and can be up and running within 30 minutes for a first-time user.”[/blockquote]

“The release of the portable system earlier this year took the concept one step further, by packaging the entire system, including transceiver, 10 m of deck cable, GPS antenna, and a Wi-Fi enabled PC interface unit and 10-hr power supply into a IP-67 rated waterproof Peli case. Sonardyne has even found room to include two beacons.
“With a high resolution MBES to use as the basemap for the divers, the use of a day boat, which needs the system mobilising quickly on reaching the site each day and the usual requirement to be getting divers in the water at slack water, meant the site was a very good real-world trial location for the portable system.”
The idea with Micro-Ranger 2 is that users have an out-of-the-box, simple to deploy systems. So MSDS Marine decided to put that theory to the test, not opening the box until the night before they mobilised to work on the Northumberland. “The only consideration prior to mobilisation was how to mount the system to the dive boat,” says Mark, especially as Predator has no special mounts for survey equipment. “In keeping with the easy deployment philosophy, we fabricated a 4m aluminium pole with a flange at the bottom to mount the transceiver and a socket at the top to mount the supplied GPS antenna. The advantage of a simple solution like this is that everything is in one plane, meaning there is less room for error when measuring offsets or if the pole moves slightly when in use. It can also be mounted to any vessel quickly and easily with the use of ratchet straps.”

Having then installed Sonardyne’s Ranger 2 software on to their laptop, they were then ready to go. The next step was to connect to the Micro-Ranger 2 portable’s Wi-Fi connection and then the Micro-Ranger 2 portable transceiver and GPS antenna offsets inputted. And then finally, to add the tracking beacons – in this case our smallest beacon, Nano. This is done by docking the Nano in its wireless NFC charger, which doubles as an interface with the laptop, and then running the beacon wizard. Finally, once everything is set up, transceiver’s internal magnetic compass needs to be calibrated to ensure that any local variations caused by ferrous metal on the boat doesn’t interfere with it. For general tracking relative to a fixed point, or to a vessel, this is all that needs to be done to start tracking divers or an ROV.
However, MSDS Marine also wanted to track the divers relative to the MBES data. This was done by exporting the position data via Ranger 2 into a GIS application on the same laptop. In total the setup time was around 90 minutes, 20 to 30 minutes to setup the tracking and around an hour to download, install, setup and test the GIS. There was then a further 30 minutes to run the transceiver calibration.

The results
“Within a few seconds of the divers entering the water, the Ranger 2 software started tracking the beacons and displayed the positions on the screen,” says Mark. “The position of the diver was then visible in real time within the GIS program. Once tracking the diver, the topside supervisor was able to guide them to, and around, the site using voice communications, recording where they had been and features of interest and descriptions within the GIS. Where particular features required a more accurate position to be taken the beacon was placed on top of the feature for 30 seconds so that an average position could be taken.
“The system was mobilised and used as it came, out of the box, with no additional external sensors. Due to the nature of the project, the boat was constantly mobile and changing speed, distance, and orientation, all of which can influence the absolute positional accuracy. Overall, though, the position of the beacons corresponded with features identified on the seabed by up to two metres, with this reducing significantly when the vessel was closer to the beacons.
“The Micro-Ranger 2 portable system was a very simple and easy solution to track divers with minimal setup and technical knowledge. Considering the environment and how it was used, the level of accuracy was impressive and suitable for most general diver tracking work.”
The results from the dives on the Northumberland will now be analysed by PAS and then shared with Historic England to allow them to aid in their future management of the site.
For MSDS Marine, the work continues, including trialling Micro-Ranger 2 and we look forward to hearing more about the results of their work.
For a full review by MSDS Marine on the use of Micro-Ranger 2, please click through to their blog, here.
John Ramsden steps down as CEO; Fasham will assume the role effective 1st September 2021, with Ramsden remaining on the board until the end of the year.
Sonardyne Group announced that its Board of Directors has appointed Stephen Fasham as Chief Executive Officer, taking over from John Ramsden who is stepping down from the role ahead of his retirement. Effective 1st September 2021, Stephen will move from his current role as Chief Operating Officer, with John remaining on the Board in an advisory capacity.
John and Stephen have enjoyed a close working partnership since Stephen joined in 2013. They will continue to work together over the coming months, ensuring a seamless transition as Stephen assumes the leadership role.

Stephen brings an extensive background in engineering businesses across a wide range of sectors, combined with knowledge and experience of Sonardyne gained through holding several senior positions across the business, most recently working closely with each of the operating companies in his capacity as Group Chief Operating Officer.
[blockquote author=” Stephen Fasham, Sonardyne Group”]”As we look to build on the significant growth and success achieved under John’s leadership, I am incredibly honoured to be given the opportunity to take a leading role in delivering our clear vision and strategy for the future – one which I’m confident will see the business continue to thrive. John has made an outstanding contribution to Sonardyne. His pedigree and expertise in subsea technology has been integral to the success and continuity of the business. I look forward to working with him over the coming months as we continue to develop the breadth of products and services we offer our customers around the world.”[/blockquote]
Speaking on the appointment, John said “Having worked closely with Stephen for a number of years, it’s clear he brings a wealth of experience to the role, and I am confident that I’m leaving the business in good hands.”
Sonardyne Group comprises Sonardyne International, Wavefront, Chelsea Technologies, EIVA and Voyis; companies whose purpose is to apply engineering excellence and innovation to enable a safer, more sustainable world, delivering solutions to challenges within the energy, science, environmental, defence and commercial markets.
Kawasaki Heavy Industries’ (KHI) has chosen a suite of subsea navigation, positioning and communications technologies from marine energy, defence and science company Sonardyne to navigate, track and control its first commercial SPICE autonomous underwater vehicles (AUVs).
The SPICE (Subsea Precise Inspector with Close Eyes) AUV, complete with a submerged docking system and unique robotic arm for non-destructive testing, has been designed and built by KHI for intelligent and low-logistic pipeline and subsea asset inspection operations down to 3,000 m water depth.
To support accurate and long-duration navigation on its missions, while minimising complexity and payload space consumption, the vehicle is fitted with Sonardyne’s industry leading hybrid navigator SPRINT-Nav.
For underwater positioning and communications, the SPICE AUV is using Sonardyne’s AvTrak 6 – a combined transponder, modem and emergency relocator beacon all in one. KHI has also been using Sonardyne’s Mini-Ranger 2 Ultra-Short Baseline (USBL) system with a Robotics Pack to support tracking and communications during development and testing.
Two SPICE (Subsea Precise Inspector with Close Eyes) AUVs have already been ordered by UK-based subsea services company Modus Subsea Services for cable and pipeline inspections, as well as more conventional surveys. One is due to be delivered to Modus this year.
[blockquote author=” Noriyuki Okaya, Development & Design section, AUV Department Kobe Shipyard, at KHI.”]”Our goal with the SPICE AUV is to enable operational efficiency of inspection operations, to reduce cost and reduce the burden and risk experienced by crews working on support vessels offshore. We believe that Sonardyne’s instruments will support the highly accurate navigation of the SPICE AUV, supporting our goals”[/blockquote]
SPRINT-Nav combines Sonardyne’s SPRINT INS sensor, Syrinx 600 kHz DVL and a high accuracy intelligent pressure sensor into a single housing, making it one of the smallest combined inertial navigation instruments on the market. SPRINT-Nav’s tight integration of raw sensor data at a low level provides unprecedented navigational performance and precision for subsea vehicles, consistently outperforming competing systems in customer trials. The SPRINT-Nav 700, selected by KHI, is equipped with the highest performance available sensors, including Honeywell ring laser gyros and accelerometers.
Built for simple integration on AUV platforms, AvTrak 6 combines the functions of transponder, transceiver and telemetry link in one low power unit, leaving more payload space and power for other instruments. It enables AUVs to undertake simultaneous LBL ranging, USBL tracking via a surface vessel and robust telemetry for AUV to vessel and AUV-to-AUV communications.
Mini-Ranger 2 is ideal for use from smaller vessels, where survey-grade positioning performance is required. It can simultaneously track 10 targets at very fast update rates, is quick to install and has a standard operating range of 995 m, extendable to 4000 m. Sonardyne’s Marine Robotics software pack unlocks valuable additional capability when used with a compatible subsea vehicle mounted instrument such as AvTrak 6. This includes secure data exchange and remote control of multiple AUVs deployed in swarm scenarios.