A pioneering system developed by marine technology company Sonardyne to study ocean floor movement has been recognised with a Queen’s Award for Enterprise in Innovation, the highest award a UK business can receive.
Developed over more than a decade and in use globally by the energy and ocean science sectors, Sonardyne’s seabed deformation monitoring system provides engineers and scientists with critical new understanding of the seafloor and the physical processes that act upon it.
Using a network of autonomous, battery-powered instruments deployed on the seabed, the system measures horizontal and vertical seabed movement, at a level of precision that was previously impossible. Initially developed for the offshore industry to identify geological hazards within oil and gas reservoirs, it has since been adopted by the earth science community to study everything from undersea landslips near volcanoes to deep sea plate tectonic motion. Such motion can trigger devastating tsunamis in some of the world’s geological hot spots, including the infamous Pacific ‘Ring of Fire’.
The Queen’s Award, conferred by Her Majesty Queen Elizabeth II, on advice of the Prime Minister, recognises and encourages commercial success resulting from outstanding innovative achievements by businesses in the UK.
Graham Brown, Managing Director of Sonardyne, “On land, global positioning satellites are used to undertake real-time earth observations, but the signals they transmit cannot penetrate through water. This has created a huge challenge for the energy and earth science community. Put simply, they’ve been bound by the limits of physics. We have broken through these limitations and opened up new capabilities. This has led to a whole new era of research for seabed science, delivering new insights into the fundamental processes around subduction zones and consequently understanding the risks of earthquakes and tsunamis.
“This award, our fourth Queen’s Award, reflects the commitment of our workforce, both here at our headquarters in Hampshire and at our international locations, in solving our clients’ most important underwater challenges. It has added significance this year, as we celebrate our 50th year in business.”
The instruments used in Sonardyne’s seabed deformation monitoring system have been engineered using low power electronics and long-life batteries, all in pressure tolerant housings, enabling them to remain on the seabed for more than 10 years at a time.
They also contain Sonardyne’s underwater digital acoustic communications technology, which won a Queen’s Award for Enterprise in Innovation 2014. This allows hundreds of instruments to be deployed simultaneously and the data they gather to be wirelessly gathered using subsea robots and crewed or uncrewed surface vessels.
Users of Sonardyne’s seafloor monitoring system include international energy company Shell and Earth research organisation Scripps Institution of Oceanography.
Dr. Paul Hatchell, Shell’s research geophysicist (retired), “Sonardyne’s seafloor deformation monitoring technology was a complete game-changer for helping Shell to gain insight into their offshore reservoirs, located in very deep water, where direct access to the seafloor by people is obviously not practical.
I worked closely with the Sonardyne team on this application from the very beginning. This award is highly deserved recognition of their dedication to technological innovation throughout our 15-year journey together and I am thoroughly delighted with today’s announcement.”
Dr. C. David Chadwell from Scripps “Congratulations to Sonardyne on the award. By applying their decades-long experience in innovative engineering and quality production, Sonardyne has expanded geodetic monitoring of the seabed beyond that of a couple of research groups to a much wider international scientific community ready to tackle the offshore problems associated with subduction zone earthquakes and their tsunami hazards.”
Sonardyne’s Ranger 2 Ultra-Short BaseLine (USBL) underwater tracking technology is to provide improved support to critical oceanographic work from the research vessel Atlantis, including science expeditions in the human occupied submersible Alvin. The most updated version of Ranger 2 provides greater precision, speed and range tracking and replaces the existing Ranger 1 system, which has been supporting research from the ship since 2009.
Additional upgrades include a new AvTrak tracking and telemetry instrument for Alvin, to support the increased depth rating of the submersible, from 4,500 m to 6,500 m. This bespoke 10,000 m-rated AvTrak meets the requirements for a 1.5 times safety margin for human-occupied submersibles.
The Ranger 2 system will support the Atlantis’ work by enabling science teams to precisely monitor the position of submersibles and other underwater platforms deployed from the vessel, including remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), as well as tracking its CTD (conductivity, temperature and pressure sensor), towed sleds and dredges, in all water depths.
The team on the Atlantis will also be able to use Ranger 2 to communicate with scientists onboard the Alvin throughout every stage of a dive via the AvTrak using the secure Sonardyne Messaging Service (SMS) feature. The AvTrak can also act as a relocation beacon for the Alvin, as well as remotely operated vehicles (ROVs) deployed by the Atlantis.
The Atlantis is also upgrading its through-hull transceiver from a High Performance Transceiver (HPT) 5000 to a Gyro USBL 7000, complete with a new gate valve, flanges and sea chest.
Gyro USBL combines the vessel heading, pitch and roll data that’s critical to USBL system performance, with an acoustic transceiver – all in one housing. Atlantis will be equipped with the latest generation Gyro USBL, which it 30% shorter and 40% lighter than its predecessor. That means it’s easier to handle and install so more vessels, including small vessels of opportunity and unmanned surface vessels, can get the best performance from their USBL system.
Owned by the US Office of Naval Research and operated by Woods Hole Oceanographic Institution for the benefit of the US oceanographic community, Atlantis is one of the most sophisticated research vessels afloat. The vessel was specifically outfitted to act as a mothership for Alvin and can accommodate up to 24 scientists working in six labs for up to 60 days at sea.
Atlantis is part of a class of similar Navy-owned research vessels, which includes the University of Washington operated research vessel Thomas G. Thompson, which is also fitted with a Sonardyne Ranger 2 Gyro USBL system.
Kim Swords, Senior Applications Engineer, for Sonardyne in North America, says, “We’re delighted with the through-life service that Ranger 1 has delivered to the Atlantis’ marine and science. This upgrade sees the Atlantis join the Thomas G. Thompson and a global fleet of scientific research vessels in being equipped with Sonardyne’s most up-to-date USBL technology available”
Developing the tools that enable us to “turn the lights on” underwater and to project those lights far from our own shores will underpin the use of autonomy in the defence domain, says Ioseba Tena, our new Head of Defence.
The world’s navies are facing up increasingly to challenges posed by robots. On the one hand, developing this new generation technology requires that we perform at our innovative best. On the other hand, our near-peer adversaries are developing their own systems which we need to counter. To further complicate matters, the world is fighting a global pandemic. Many defence budgets have been frozen or cut. How do we do more with less?
When I joined Sonardyne almost five years ago, my focus was on underwater robotics and to help us become a significant part of the marine robotics revolution. But throughout that period, I have spent increasingly more time engaging with military customers and these are the challenges they are facing. This is not an accident.
I am now excited to take on the role of Head of Defence at Sonardyne.
For me, the answer has always been to take sailors out of the battlespace. It will take a while. It is easier said than done. But that is undoubtedly the goal. In fact, that has been my goal throughout my professional career. I have worked alongside colleagues who share that goal. Sometimes it felt like a lonely place. Not everybody expects that outcome.

This sounds like I am a right geek, but I often ask myself, “Will I live to see a truly autonomous force projecting our interests abroad while being operated from a home office by a new generation of sailors?” Air drones do so routinely now. Maybe in the surface and sub-surface maritime domain it won’t happen in my lifetime. However, I am convinced that we will see an increasing number of subsea robots, uncrewed vessels and drones.
THE INTEGRATED REVIEW OF SECURITY DEFENCE, DEVELOPMENT AND FOREIGN POLICY
The new integrated review from the UK Government is helping me feel a lot more confident that we are moving in the right direction. It’s not just us ocean robot technologists banging on. The United Kingdom’s Prime Minister Boris Johnson sees technology at the forefront of what we do. “Our aim is to have secured our status as a Science and Tech Superpower by 2030,” he said. Which in turn elicited the following response from the Royal Navy’s First Sea Lord Admiral Tony Radakin: “Our fleet will become more automated and lethal. We will start to replace our crewed minehunting ships with drones that find mines 5-10 times faster.” Music to my ears.

The UK is not the only country embracing autonomous solutions. The US Navy has always been on the side of innovation, just listen to what Thomas W. Harker, Secretary of the Navy (Acting), stated as part of the Unmanned Campaign Framework: “To compete and win in an era of great power competition, the Department is committed to investing in advanced autonomy, robust networks, and unmanned systems to create true integrated human-machine teaming that is ubiquitous across the fleet.”
WHERE IS THE FUN AT? UNDERWATER.
What will these autonomous robot warriors need to do? The mission has evolved. Alongside the threat from terrorism, piracy and rogue states over the last decade, we find ourselves facing up to challenges from advanced adversaries who can deliver similar capability to our own. I believe our focus must be to develop tools that enable us to “turn the lights on” underwater and to project those lights far from our own shores.
We still need to be able to detect, track and communicate the presence of combat swimmers and boats. We now also now need to be able to detect, track and communicate the presence of unmanned systems.
At Sonardyne we are in the privileged position of being able to deliver the sensors which will enable autonomous and increasingly remote systems sense and communicate. In my new role I look forward to working alongside my colleagues, our industry partners, and our navy customers to make a significant impact helping make the oceans safer for all.
Measuring depth in the ocean over long time frames has been out of reach for academia and industry alike. A new capability built into our Fetch seabed sensor changes the game. It’s a new breed of bottom pressure recorder that truly unlocks long-term monitoring capability.
Understanding small movements of the seabed, which may be only a few centimetres over a single year, are critical in many fields.
Such minute measurements are needed by scientists to get a better understanding of the earth’s tectonic processes. This is especially critical when it comes to the deep outermost areas of offshore subduction zones, where one tectonic plate moves beneath one another. Similar measurements also help offshore oil and gas production companies to understand changes in their reservoirs.
Over the last few decades, our ability to measure these movements, even in several thousand of metres of water depth, has taken great leaps.
We can measure horizontal movement to centimetric accuracy, using range measurements between instruments like our Autonomous Monitoring Transponders (AMTs). We can also position these sensors within a global reference frame.
However, measuring changes in vertical displacement has remained a challenge. This is due to the reliance on pressure sensors to measure depth, because, despite the best efforts of manufacturers, these all drift to some degree and can introduce errors in measurement. These errors can be of a similar magnitude to the actual subsidence and in some cases even greater.
UNDER PRESSURE – LONG-TERM SEABED MONITORING
This normally means we have to regularly recalibrate pressure sensors. But what do we do if we want to monitor continuously for many years, which requires leaving the sensors on the seabed? Understanding the problem is a start.
We’ve therefore spent a lot of time building our knowledge of pressure sensors, as these are essential to depth measurement in deep water for a range of applications, from tsunami detection to seabed subsidence. As a result, we have a dedicated pressure sensor characterisation laboratory where we can screen all our pressure sensors.

While pressure sensor characterisation goes some way to improving the accuracy of pressure measurements, a breakthrough discovery was made by Jerry Paros, founder of pressure sensor specialist Paroscientific. This is that drift is in fact a bias and it can be overcome by measuring that bias and then somehow removing it.
So we set out to find a way to allow a sensor to, on its own (potentially some 7,000 m deep on the seabed) reliably measure and therefore remove that bias. Our solution implements a concept called AZA, or Ambient-Zero-Ambient. It involves in-situ calibration of the pressure sensor. It’s a game-changing capability that now enables measurement of minute changes in seabed subsidence or tectonic activity with extremely high accuracy. We’re talking vertical seabed displacements of less than 1 centimetre per year over long periods.
It can do this because it’s a self-calibrating sensor – the clue is in the name. It uses a patented system of two motorised valves, a pump and a reference sensor to measure a depth sensor offset in situ, eliminating the need to recover equipment mid-deployment.
A REVOLUTIONARY STEP-CHANGE IN PRESSURE SENSOR CAPABILITY
Fetch AZA is a revolutionary step-change, building on an evolution of our Fetch monitoring transponder. Fetch has been deployed all over the world’s oceans to great effect and has become a trusted seabed science instrument. It has an integrated telemetry module that enables data to be acoustically recovered from the surface, whether that’s from a research vessel, supply ship or uncrewed surface vessel (USV). It also has sufficient battery capacity for seabed deployments of up to 10 years at a time.
With AZA in the mix, we can measure the pressure sensor drift, and recalibrate in-situ, effectively enabling a 100 times increase in sensitivity of these systems.
Since first being tested on the Mars field in the US Gulf of Mexico in 2017, AZA capability is now being used in our Fetch AZA subsea sensor logging nodes for seabed settlement monitoring and measuring geological faults, movement of which could be another indication of earthquake and tsunami risk and is, again, another area where highly precise measurements are required over long periods of time.
SO HOW DOES AZA WORK?
The key point to keep in mind is that even the best pressure sensors that we normally use have an accuracy of ±0.01% of its full scale, irrespective of the scale value. Consequently, a high-pressure sensor, such as one we’d use for full ocean depth measurement, is less accurate in absolute terms than a low pressure one with a much smaller scale. The basic principle of AZA is therefore to perform a regular in-situ comparison between Fetch’s high pressure sensor, which has a full scale of several hundred bar, and a low pressure sensor of only a few bar.
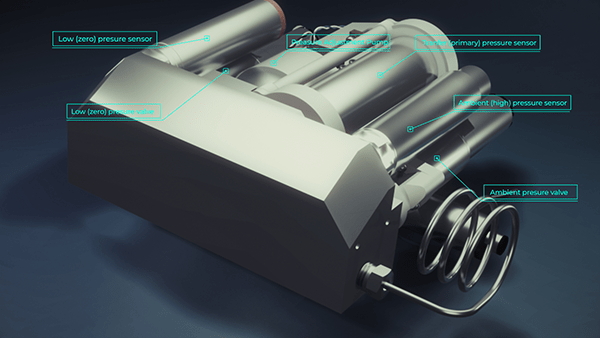
The AZA mechanism housed inside Fetch’s glass sphere comprises three pressure sensors:
- Firstly, ambient (high) – which is continuously exposed to the external ambient pressure;
- Secondly, low (zero) – the reference sensor,
- Plus a transfer (primary) – used to compare the other two sensors.
In addition, there are two pressure valves;
These valves are used to isolate the different sensors during the comparison measurement, as well as a pressure adjustment pump, which is used to control the pressure inside the manifold.
In its normal operating mode, the ambient pressure valve is open and the low (zero) pressure valve is closed. This means that the ambient and transfer (primary) pressure sensors are both connected to the external seawater and measure the ambient pressure.
When a reference measurement is initiated, the ambient pressure valve is closed and the pump piston is withdrawn, reducing the pressure in the manifold until it is near to zero. We can then open the low pressure valve, which connects the low (zero) and transfer pressure sensors together. At this point the transfer sensor bias can be accurately measured against the low pressure sensor.
After completing this measurement process, the low pressure valve is closed and the pump piston is extended, which returns the manifold pressure back to ambient.
Then the ambient pressure valve is opened, which re-exposes the transfer sensor to the ambient outside seawater pressure. With both ambient and transfer sensors connected to external seawater, the instrument is back in its normal operating mode.
Watch the video to see this in action. As you can see in the video, AZA effectively calibrates the system to the much higher accuracy low pressure sensor, enabling us to measure the sensor bias. This in turn is used to eliminate pressure sensor drift in the primary pressure sensor.
REMOTE, LONG TERM AND LOW OVERHEADS
Fetch AZA is the latest iteration in the development of our Fetch instrument. It still has the same functionality including an integrated modem, which enables remote data recovery and configuration of the instrument. All you need is a USV.
Furthermore, the ability to remotely time synchronise its internal clock, together with long-duration batteries, means sensors can be deployed for many years at a time, all of which enables the lowest possible carbon emissions and costs.

These capabilities have created an instrument that revolutionises seabed measurements, across ocean science and the commercial sectors. This means that scientists can now undertake measurements, at a resolution they’ve never been able to achieve before. These are critical to understanding tectonic processes.
In the commercial sphere, Fetch AZA now meets upstream production companies’ long-term goal of measuring 1cm/year of vertical movement across their fields. Such fine-scale measurement provides a powerful new tool for proactive reservoir management. This is a key enabler for maximizing economic recovery.
If you would like to know more about Fetch AZA and would like to know how you benefit with this technology in your projects, please get in touch.
Marine technology company Sonardyne has announced its Vigilant Forward-Looking Sonar (FLS) is now available as an external sensor interface for NAUDEQ’s electronic chart display and information system (EDCIS) MASTER-DEQ.
Sonardyne’s Vigilant FLS shows captains and crews where it is safe to navigate and alerts them to potential underwater dangers that could result in a collision or grounding. NAUDEQ’s naval, merchant and fishing vessel users can now take advantage of this valuable aid to navigation through Vigilant’s enhanced reality imaging overlaid on their MASTER-DEQ bridge display.
Using a compact, retrofittable bow-mounted transducer arrangement with no moving parts, Vigilant FLS gathers sonar data. From this, an accurate model showing easy to interpret 3D bathymetry of the seabed down to 100 m water depth and out to 600 m is built and displayed in real-time. 2D plots highlight submerged objects in the water out to 1,500 m ahead of the vessel over a 90-degree field of view. A history mapping capability provides greater situational awareness when tight manoeuvring or leaving a confined area.
Using the sonar data from Vigilant, NAUDEQ’s MASTER-DEQ builds and displays cut profiles and 3D maps of the seabed, taking into consideration the tide level. Through MASTER-DEQ, mariners can also view cut profiles looking at their course over ground, obstacle avoidance coinciding with heading and a profile in a user-defined direction.
By superimposing reliable Vigilant data on the seabed topography, built using NAUDEQ’s technology and using ENC S-57 data, a comparative analysis can be run. Any discrepancies between the chart data and the real-world returns from Vigilant are then clear to see. This can be invaluable when a vessel routes through poorly charted areas or where the chart information is not updated, or the seabed is likely to have changed because of tidal or harsh weather conditions.
[blockquote author=” Nikolai Chagoubatov, co-founder and CEO at NAUDEQ”]”A collaboration between the engineers in our two companies led to the discovery of new capabilities for reliable and early visualisation of the underwater terrain ahead of a vessel and in any chosen direction, within range of the sonar. This can significantly improve the safety of navigation, especially in narrow sea lanes or channels and when approaching the shore, both for large-tonnage and low-tonnage vessels.”[/blockquote]
“The quality and stability of the imagery produced by Vigilant is remarkable and unlike any other FLS we’ve encountered,” he adds. “Advance and accurate knowledge of underwater obstacles on the seabed along the path of the vessel is much more important than anticipated data. The high accuracy and range of measurements of the Vigilant data allows the watch officer to make an early decision on a safe avoidance of a detected underwater obstacle. This minimizes the risk and relieves unnecessary tension and stress in vessel management in non-standard situations.”
Derek Lynch, Global Business Manager, Vessel Systems at Sonardyne said, “The last 12 months has seen significant levels of groundings and collisions, strengthening the case for many types of vessel to consider Vigilant. Knowing what lies beneath the water in front of you, whether cruising in open water, approaching shallows or manoeuvring in a harbour, lowers risk to crew, the environment, cargo and vessel itself.
“The software team at NAUDEQ have built an impressive ECDIS platform, incorporating several unique features and modes conceived from their time serving as naval captains,” Lynch added. “With Vigilant now available as an option, it represents a very compelling solution for mariners.”
Vigilant is available as a standalone system with its own graphic user interface (GUI), into which chart displays can be integrated. It is also designed to be able to be overlaid into third party ECDIS systems, such as MASTER-DEQ, providing a powerful extra layer of domain awareness against otherwise unseen underwater obstacles.
The boundaries and capabilities of autonomous underwater vehicles (AUVs) are being continuously pushed and expanded. Their benefits are clear: allowing longer missions underwater with minimal human support, from a vessel or shoreside, supporting persistent maritime surveillance.
Being able to maintain surveillance missions for months on end is attractive, especially for countries with long coastlines, like Canada. But fully meeting this vision is often hindered by the need to recover underwater vehicles for recharging, data access and mission updates. Launching and recovering AUVs at sea is also risky: to the assets and the humans involved. Anything involving splash zone and crane operations is a risk.
AN ‘IN-FLIGHT’ ROUTE TO PERSISTENT MARITIME SURVEILLANCE?
Fighter jet mission duration can be extended by inflight refuelling, so why not do the same for AUVs, just underwater? In fact, International Submarine Engineering (ISE) has recently successfully demonstrated this type of concept, supported by underwater acoustic positioning systems from Sonardyne. It’s a concept that would enable multiple vehicles, supported by a single uncrewed surface vessel (USV), to operate for long periods without needing to be brought to the surface or recovered to deck or quayside.

It’s a project being run in partnership with Dalhousie University and is being funded by Canada’s Innovation for Defence Excellence and Security fund (IDEaS), with the goal to use the dock for the purpose of persistent maritime surveillance.
Jason Epp, Electrical Engineer from ISE, says, “Enabling persistent maritime surveillance is a key goal. Canada has one of the longest coastlines in the world. From a defence aspect, it helps to have a fleet of vehicles that can be supported from a single vessel without repeated launch and recovery operations, making these missions safer and more efficient.”
ISE has been working on this concept for about two years. Late last year ISE performed full in-water trials of its towed docking system, supported by a combination of technologies – sonar, visual and acoustic.
TOWED DOCKING – WITH SONAR, VISUAL AND ACOUSTIC SUPPORT
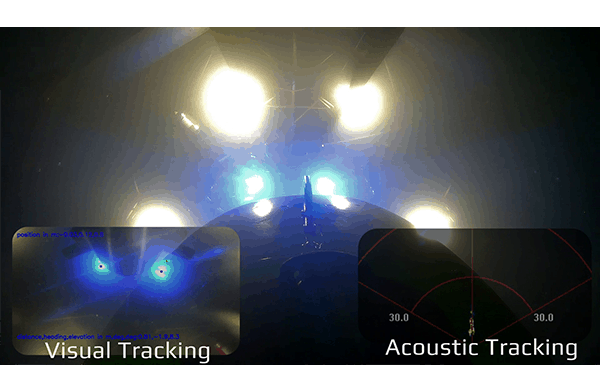
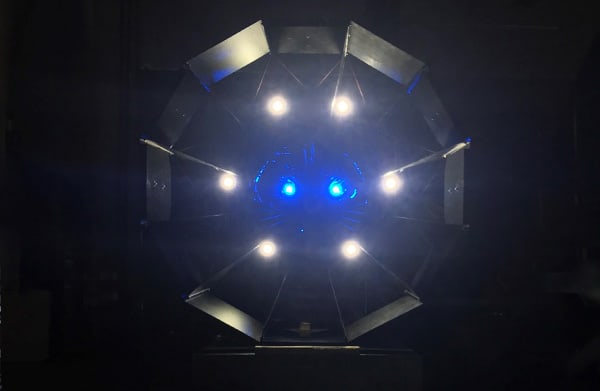
“We’re using our standard Explorer AUV, which can already operate on its own,” explains Epp. “It has a modified nose cone, which includes a latching mechanism. We’ve also added an obstacle avoidance sonar with a horizontal beam pattern for tracking the towed dock. It also has a relatively low-cost low-light camera system, which will be used to track an array of eight LEDs on the dock for the final approach. In addition, the vehicle also has an AvTrak 6 tracking and telemetry transceiver.
“The towed dock itself is relatively simple. It has a corresponding latching mechanism, with a motor or actuator controller for unlatching, a depth sensor, attitude and heading reference sensor, the LEDs and a Nano transponder. Soon it will also have charging and data upload capabilities. In addition, we used a Ranger 2 Ultra-Short BaseLine (USBL) system onboard the towing vessel.”
READY, STEADY, DOCK, IN INDIAN ARM
The trials were run late last year, in Indian Arm fjord, near Vancouver, Canada. On repeated runs, the AUV, at about 20 m below the surface, to avoid surface turbulence, used its obstacle avoidance sonar to get within 10 m of the dock. From there, it switched to the visual tracking, using its camera and the LED array, to close in on the dock. From the surface, Ranger 2 tracked and positioned the AUV and the dock, using the AvTrak 6 mounted on our Explorer AUV and a Nano mounted on the dock, and provided a telemetry link to the AUV.
“Since the Explorer is an autonomous system, once you hit the button, it’s really just about observing it,” says Epp. “But, during the trials, once the vehicle was down in the water, we wanted to be certain where it was and in relation to the dock. Using Ranger 2, we were able to track the location of both at five second intervals with really good accuracy. We could also get vehicle status updates, so we could monitor the state of the AUV’s algorithms and see that everything was working on its own, as it should.”
USBL AND DOCKING OPTIONS
While ISE’s trials were very much about testing the ability to locate and dock using the obstacle avoidance sonar and LED lights, the use of Ranger 2 provided the ability to monitor the vehicle and provide confidence in each operation, providing the crew with visibility of both systems throughout each phase of the trial. Ranger 2 can also offer additional options and benefits to these type of operation as ISE moves further down the road with its trials, as we’ll touch on shortly.
First, it’s worth mentioning that there are different Sonardyne USBL systems available, from Micro-Ranger 2, for inland coastal work, to Mini-Ranger 2, which is great for offshore operations, including high elevation tracking, such as towed objects, like a dock or an approaching underwater vehicle. And then there’s Ranger 2, which has everything and goes to full ocean depth. Find out more about our full Ranger family of USBL systems here.
The flexibility of our USBL systems also means that there are lots of options open to technology developers wanting to develop an underwater docking system. “For example, our Ranger 2 family of USBL systems can be enabled with our Robotics Pack, which can calculate the positions of the dock and the AUV and then send the position to both, so that each knows where the other is,” says Chloe Kennard, Sonardyne applications engineer. “It can do this while simultaneously exchanging command and control data, also in both directions, and it can do this with up to 10 objects in the water at any one time.
TRACK, COMMUNICATE, ENSURE NAVIGATIONAL ACCURACY
Even without the Robotics Pack, you can communicate with your AUV and this can help ensure their navigational accuracy. “Many vehicles benefit from being given updates about where they are,” says Chloe. “On the surface, they can locate themselves with GNSS positioning. At the seabed they can use bottom track with their Doppler velocity log (DVL). But in between they’ve to rely on their inertial navigation system and it can drift rapidly.”
What’s more, because all Sonardyne USBL systems speak the same language, whichever you use, you can use the same suite of instruments with it. So, if you start your development work with a Micro-Ranger 2, you can step up to a Mini-Ranger 2, for going offshore and still use the same Sonardyne instruments mounted on the AUV and dock that you used during development – the software and the interfaces are just the same.
For those working with USVs, we also have our Gyro USBL. This is a pre-calibrated USBL transceiver which incorporates AHRS, making it easy to install on any vessel without having to worry about lever arm offsets or calibration. Our latest Gyro USBL is 20% shorter and 19kg lighter than our previous variant, making it ideal for smaller vessels and USVs, as well as vessels of opportunity.
DOCKING OPTIONS
But back to docking… “We’ve also worked with companies working with optical docking using SLAM (simultaneous location and mapping) and QR code symbols, with ArUco and ChArUco – an open-source image-based location methodology,” says John Houlder, pro-user of Ultra-Short BaseLine (USBL) acoustic tracking systems at Sonardyne. “Our BlueComm optical underwater communications system has also been used to provide a live video feed to allow onshore remote pilots to drive AUVs into their dock. But ultimately USBL systems still come into play. We tend to find that although the operating paradigm for many AUVs is autonomous, we still want to know where it is and to be able to control it if necessary. Having a human in the loop is still necessary and desired.
Indeed, “Using Ranger 2 really brought up the level us confidence we had in bringing these two vehicles together and making them connect; something that you normally try to avoid in the marine environment,” says Epp. “It wasn’t the best environment for optical systems, but it worked well. We were able to pick up the lights from 10 m away and use the camera system to close into the dock. It’s all steppingstones to where we want to be.”
NEXT STEPS FOR ISE’S PERSISTENT MARITIME SURVEILLANCE PROJECT
The docking trials were the latest milestone in ISE’s persistent maritime surveillance project, which has been running for about two years. As well as using the trials data to further refine the vehicles autonomy engines, the next steps will include incorporating charging and data upload, says Epp. “Our next step is to get the electro-mechanical options for this locked down,” he says. “There are a few options and solutions we’re looking at.”
“We also want to consider the bigger picture; to operate an entire marine autonomous mission,” he adds. “Right now, we hit the mission button and the AUV dives down and goes to try and find the dock. In the bigger picture, we want to go down to do a mission and then communicate with a USV-towed dock and then dock. So we will be doing more USBL integration, to let the dock, vehicle and USV all know where each other are, so we will be looking at Sonardyne’s Robotics Pack capability. We’ll also be looking to go out into higher sea states, as until now we’ve been in relatively sheltered waters.”
The towed dock will also see some modifications, including making it smaller, which will make it easier to handle and tow through the water. Launch and recovery systems for the towed dock are also being looked at.
So, there’s still more work to be done, but ISE has all the building blocks in place. ISE’s current focus is to move to working with a USV to tow the dock, and to have a towed listening array on the AUV, as part of a persistent maritime surveillance scope. But, adapting the dock to allow for launch and recovery is also in the team’s sights, opening up yet more possibilities for the technology in other applications. We can’t wait to find out more.
Underwater technology company Sonardyne has successfully provided remote Fusion 2 survey operations capability on a live subsea construction campaign in the US Gulf of Mexico.
Using its new Remote Operations Access Module (ROAM), Sonardyne surveyors based in the UK were able to remotely access and operate the Fusion 2 survey and construction software onboard Subsea 7 vessels in the Gulf of Mexico.
By using the ROAM, potential limitations on operations posed by international travel restrictions were mitigated and the decision to upgrade from Fusion 1 to Fusion 2 was de-risked.
Fusion 2 streamlines offshore field development operations by reducing the time and capital expenditure needed to undertake survey and construction tasks. It combines traditional Long BaseLine (LBL) and inertial navigation system (INS) techniques in one, unlocking significant benefits, not least being able to perform real-time simultaneous location and mapping (SLAM) calibration of sparse seabed transponder arrays. Real-time SLAM calibration capability means far less hardware has to be deployed on the seafloor, significantly reducing vessel time, environmental impact and equipment inventories.
ROAM is a rugged, portable communications link in a box which can operate over satellite or any other available network, such as 4G/5G and vessel Wi-Fi, providing secure access between Sonardyne engineers and any vessel needing remote expert assistance.
The remote operations service was provided this summer during a deep water campaign on the Mad Dog Phase 2 project in the US Gulf of Mexico. Subsea 7 onboard surveyors were able to undertake remote training in Fusion 2 prior to deployment. Then, using the ROAM, Sonardyne surveyors working onshore in the UK were able to work shifts alongside their counterparts onboard the vessel in Fusion 2, supporting live positioning operations and taking secure control if required.
Remote support
Facilitating remote operations is just one of the many steps we’re taking towards meeting industry’s and our own digitalisation, environmental and safety goals. While this is the first time we’ve provided a remote operational support for Fusion 2, it’s just the latest remote capability we routinely offer across our business, from data harvesting using uncrewed surface vessels to Ultra-Short BaseLine system verification tests on vessels of opportunity
Edward Moller
Head of Energy, Sonardyne
A new breed of underwater sensor that is able to self-calibrate, enabling precise, long-duration subsidence monitoring at all depths, has been deployed at scale for the first time.
The 20-plus Fetch Ambient-Zero-Ambient (AZA) pressure monitoring transponders (PMTs), developed by underwater technology specialist Sonardyne, will support an ongoing long-term, large-scale seabed monitoring project at Ormen Lange – Norway’s second largest gas field – for A/S Norske Shell.
Unlike traditional pressure sensors, which suffer from drift over time, Sonardyne’s AZA technology autonomously re-calibrates in situ. A unique control system periodically cycles the pressure sensor from ambient seabed pressure to near-zero, enabling comparison to a highly accurate low-pressure reference sensor for calibration. The reference sensor is never subjected to ambient pressure and is accurate to changes of less than a millibar, or about 1cm of head of water.
In-situ calibration unlocks the ability to be able to monitor seafloor subsidence with centimetric accuracy for up to 10 years, without a loss of precision or any need for retrieval and recalibration of the sensors.
This is the latest deployment of Fetch PMTs at the Ormen Lange field, 120 km offshore, in 800 – 1,100 m water depth. Each sensor accurately collects pressure, temperature and inclination data at the seafloor, at pre-programmed intervals. The data is then periodically harvested, from an integrated high speed acoustic modem contained within each Fetch PMT or Fetch AZA PMT, using a choice of Sonardyne’s acoustic systems deployed from an unmanned surface vehicle (USV) or conventional ship. The data is then used to calculate any vertical displacement of the seabed at the Ormen Lange field.
Shaun Dunn, Vice President of Projects at Sonardyne, says, “Many years ago, geophysicists at Shell set Sonardyne the challenge of creating instruments that were sensitive enough to measure 1cm/year of vertical movement. With this latest generation of Fetch AZA, we have achieved that goal and unlocked the benefits of using this technology to detect extremely low levels of seafloor subsidence as part of proactive reservoir management programmes.”
Sonardyne’s Fetch AZA sensors are low power, allowing for long endurance deployments, and provide time-stamped data, which is often critical to commercial and scientific objectives. With their in-built data storage and high-speed modem capacity, they can support data collection and harvesting using a wide range of other Sonardyne and third-party sensors and are compatible with any Sonardyne 6G equipment, including Ultra-Short Base Line (USBL) systems and modems.
Across a diverse range of marine applications sensors need to be deployed for long periods of time, on the seabed and in the water column. Today’s challenge is getting the data from them in a timely way. Traditional methods of recovering logged data from long-endurance sensors involve using crewed vessels and/or surface buoys. These have major drawbacks in terms of safety, speed, cost and logistics.
Uncrewed surface vehicles (USVs), sometimes also called autonomous or unmanned surface vessels (ASV/USV), now offer a low-risk, cost-effective and cleaner alternative. They eliminate the need to send people out on expensive crewed vessels to conduct what could be a low-logistic data harvesting mission.
The regulatory environment and advances in communications, battery and power management systems, payload sensors and situational awareness, have meant that USVs are now commercially and routinely operating in our water. They’re operating beyond visual line of sight (BVLOS) across a wider range of sectors.
There is a wide range of potential applications for USVs, but here we’ll take you through the options specifically for data collection in both costal locations and offshore waters. We’ll walk you through the key technical and practical considerations for your USV data collection operations; from sensor selection and choosing the most appropriate USV to payload requirements and ensuring data integrity and security.
Just in case you didn’t know, we can support your USV data harvesting operations either by providing hardware to your own USV or through a full turn-key service.
SCOPING YOUR PROJECT
It sounds obvious, but two principal factors drive configuration and operational deployment of a system required to recover subsea data by USV: location and data.
The main considerations associated with location are:
- Distance from land/operating base, which will influence your selection of USV in terms of range and endurance from its operating base.
- Water depth, which affects selection of acoustic frequency. For most applications, a medium frequency (MF 19-34 kHz) is used; however, in deeper depths a lower medium frequency (LMF 14-19.5 kHz) will be required. Sonardyne systems are configured to work in either of these (but not both simultaneously).
- Environmental conditions, which affect both the operating envelope of the USV (principally wave-height) and acoustic efficiency (environmental noise – especially in shallow water). For the latter, it may be that higher specification topside equipment is required, which may consume more of the available power budget from the USV.

Data requirements are driven by how much and how often you want it. The first is obviously driven by the sensor itself, while the latter is usually about how acceptable latency in the retrieved data is. Combined, these determine the amount of time that is required onsite to retrieve the data. However, seabed instrument battery power is also a significant consideration as the wrong logging regime could prematurely drain a battery, not record enough data or impact data quality. More on that later.
Data security also needs to be taken into consideration. Sonardyne instruments, for example, compress the data into a binary unreadable format for transmission through the water column, then data files are encrypted. The encrypted data is either forwarded and decrypted by the user with a security key or it can be decrypted onboard the USV, for real-time analysis by someone who has remote access, before being sent via secure file transfer protocol (FTP) to the end client.
CHOOSING YOUR USV
One of the bigger decisions to make is the type of USV to use. There are now many commercial, off-the-shelf USV platforms available. They vary by size, propulsion system, endurance, payload and met-ocean capability and hull type. But, broadly, they fall into three groups; low power, high power and hybrid.
Low power, environmental energy harvesting
- These are optimised for long-endurance (measured in months) and long-distance (measured in 1,000s of km) , and generate their power from waves and/or solar energy. They have limited power budget available for an acoustic positioning or communications topside, operate at slow speeds and can find it challenging to hold station over a site in strong currents or tidal streams. But they are extremely economic to run. They’re well suited to harvesting data far offshore, where acoustic conditions are good (so smaller and less sophisticated topsides can be used) and when timeliness of data is not critical.
- Typical vehicles: Liquid Robotic’s Wave Glider and Autonaut USVs.

High power, diesel or diesel electric:
- These USVs tend to be larger and faster, but pay for this with more limited endurance of a handful of weeks at most. They have much more power and payload carrying capacity and so are able to support some of the larger and more capable Sonardyne topsides, meaning that they can harvest data in much more challenging acoustic conditions. These characteristics mean that they are highly suited to transits from a shore bae to collect data from sites on the continental shelf, when timeliness of data may also be an issue, including in challenging conditions.
- Typical vehicles: L3 Harris C-Worker class, DriX, Mariner and SEA-KIT.

Hybrid diesel-electric and environmental energy harvesting:
- These USVs use a hybrid power plant to get the best of both worlds (diesel and electric). They use their high power propulsion for high speed ‘sprints’ and supplement this with solar panels, giving them the capability to operate for several weeks. As such, these USVs offer a highly flexible option to either transit to a site at high speed and loiter for an extended period, or to undertake a slower transit to the offshore area and transit between data harvest extraction sites. They have the power and payload to operate a wider range of topsides than low power USVs.
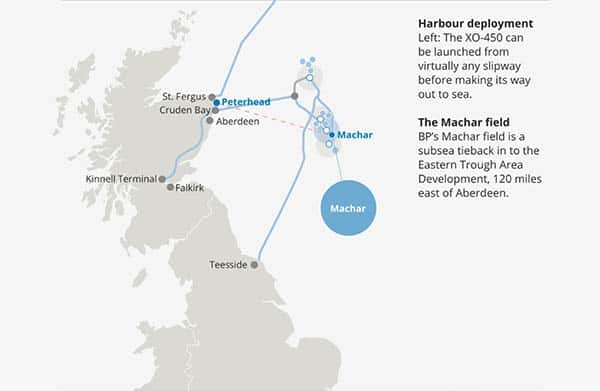
- Typical vehicles: XOCEAN XO-450 and the L3 Harris C-Enduro.
Picking which USV to use will be driven by your concept of operations (CONOPS), but note that this selection will also dictate what topside options are available to you. At Sonardyne we have experience of working directly with the world’s leading USV manufacturers and have learned the pros and cons of each platform. If you already own or operate a USV, we can enable it for seafloor sensor data harvesting, support you and train your team. Alternatively, we can offer you the complete service, taking care of vehicle selection, logistics, offshore operations and secure data delivery.
COLLECTING YOUR DATA – SEAFLOOR INSTRUMENT SELECTION
To retrieve your data, you’ll need communications capability both at the seabed and on your USV. Sonardyne instruments come with embedded communications capability and meet a wide variety of user applications. These range from sophisticated and integrated sensing and measurement instruments, to simple modems that can be interfaced to third party sensors. For detail about the full range underwater sensors that Sonardyne can provide, please get in touch.

At the heart of our instruments and modems is our Sixth Generation (6G) product platform. 6G Wideband spread-spectrum digital signal processing provides reliable and efficient data communications. It’s the ability to operate at long range, with high output power, even in high noise environments, whilst maximising user data through-put and minimising latency or delay. Any acoustic data corrupted is automatically corrected or re-requested, whilst advanced diagnostics support remote understanding of the data and operation of the instrument.
6G currently supports seven telemetry schemes, ranging from 200 to 9,000 bps for a user’s payload. The lower rate schemes are used in more challenging nosier and/or multipath environments. However, given that vessel noise is often one of the most significant limitations on telemetry, USVs can typically take advantage of the higher rate schemes in situations where a large manned vessel might be noise limited.
TOPSIDE
Communication with your chosen seafloor instrument requires a 6G compatible topside system. There are several system configurations available according to the scenario. These topside systems also enable seabed instruments to be checked and reconfigured in-situ (e.g. to alter the logging regime or optimise performance based on changing environmental parameters).

The topside systems all comprise three main components:
- A hull-mounted acoustic transducer or transceiver (capable of underwater target tracking in addition to two-way communication);
- Ancillary sensors: Global Navigation Satellite System (GNSS) and attitude and heading reference systems (AHRS) and,
- An interface to allow access via a remote desktop connection, supported via 4G, Wi-Fi, radio, satellite or executing scripts over short-bust data (SBD).
Sonardyne has a range of topside systems applicable to USV data harvesting:
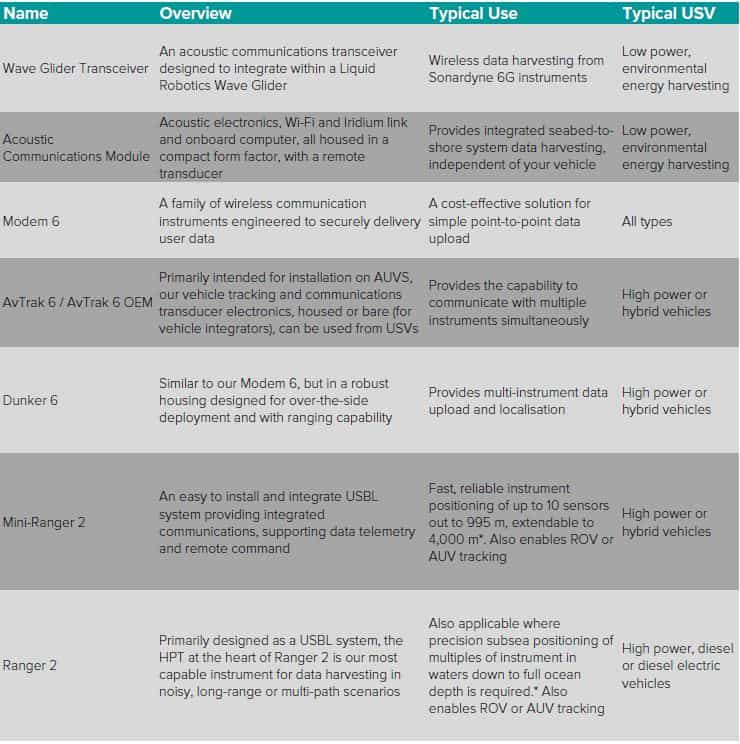
*This will require ancillary equipment such as AHRS or MRU. Contact us for more information.
MANAGING DATA HARVESTING OPERATIONS

Mission planning should incorporate who needs remote access to the vessel systems and how. It should also set out co-ordination between vessel pilots, instrument and acoustic engineers (who will verify and quality control the data as it is gathered before allowing the vessel to move to the next site), and the end customer for the data, to ensure that acquired data is as expected and to confirm any required changes to the sensor’s logging regime or output power.
“While planning is key to ensuring a successful remote data gathering mission, the marine environment is highly dynamic and can present unforeseen challenges.”
To configure and manage data uploads, Sonardyne’s Monitor software application is available. This typically runs on the host platform’s onboard computer or a dedicated machine such as our high specification, Marine Computer. Monitor allows for real-time control, configuration and monitoring of acoustic link quality between instruments and optimal data rates.
We also supply a scripting interface that works through the vehicle’s management system to execute scripting onboard. This enables Sonardyne engineers to run the script through the pilot view interface to download data including auto retry and merging overlapping data records.
Having experienced engineers on hand, to assess signal metrics in real-time, is essential to ensuring successful and optimised data transfer. If a download deteriorates due to, for example, weather, an experienced engineer can make the decision to switch to a lower data rate, which could take longer and use more battery, but would ensure mission success, depending on how much data there is left to upload. This knowledge means that we can offer the ability to resolve and navigate in noisy acoustic environments, such as where there are simultaneous operations, to guide the vessel pilot to a suitable location for optimum data upload, rather than simply increasing the power output of the sensor, which would then impact its battery life.
Experienced engineers, who are familiar with the sensors, their behaviors and the acoustics in different conditions, are also able detect anomalies in, for example, the sound velocity data, or drift in the pressure sensor, or an issue with the logging regime, and either correct the issue there and then or provide a solution, e.g. having detected suspected sensor biofouling or trawl damage.
HARDWARE, SUPPORT AND DATA DELIVERY
Sonardyne is the only company with a full suite of hardware for every requirement as well as a long track record in real-world coastal and offshore data collection, from sensor selection and deployment to delivery of the data. We are also able to conduct sea trials on location or at our dedicated trials facility in Plymouth, to ensure project success.
Our Applications Group has decades of experience in developing and deploying seabed sensors, including array planning. They can lead you and your team through the entire process to ensure you select the right sensors and topside system for your project so that you get the data you need at the level of precision that you require.
We also support many other services using USVs, including: subsea positioning, asset monitoring, acoustic /optical communications, UUV swarm communications, GPS denied environments, ADCP current mapping, LBL box-in, sensor positioning with GPS-A, transition zone seismic operations, ROV tracking, automatic target recognition on pipeline inspection and more.
So, whether you are upgrading your own USV with Sonardyne instruments or you require a full turn-key service, where we supply an end-to-end capability, including USV selection, we are ready to help. Contact us if you would like to learn more.
TRACK RECORD
Task – Seabed deformation monitoring in the North Sea
Date – April 2019, September 2020
Customer – BP
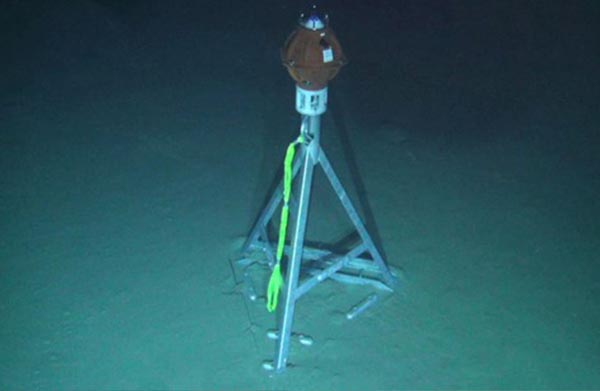
International energy firm BP is monitoring the seabed at its Machar field in the UK North Sea using our Fetch pressure monitoring transponders (PMTs). To harvest the data the four Fetch PMTS are collecting, an XO-450 USV operated by XOCEAN was deployed from Peterhead harbour in Scotland to the field 120 miles out to sea in April 2019 and again in September 2020. In April 2019, the data gathering mission, from the deployment to the return of the XO-450 back at Peterhead, took under 40 hours.
“BP have been pleased with the result of this operation and we have proven the concept of data harvesting with USV. The Fetch units are continuing to monitor the seabed at Machar, which will enable us to continue monitoring the seabed, harvesting data twice a year, using the USV, for some years to come.” – Craig Allinson, Survey and Positioning Lead at BP North Sea.
Find out more here

Task – Seabed deformation monitoring in the North Sea
Date – April 2020
Customer – A/S Norske Shell
A/S Norske Shell is monitoring the seabed at its Ormen Lange field offshore Norway, using our Fetch Pressure Monitoring Transponder (PMT) sensors. Shell contracted Sonardyne directly to use an XOCEAN XO-450 USV to harvest data from an array of 30 Fetch PMTs. During a period of global travel restrictions, the USV was ‘posted’ to Norway on a cargo vessel then handled by a local marine services provider in Stavanger. It carried out the full data harvesting mission over just three days, traveling 300 km in total and saving an estimated 5.4 tonnes of CO2 emissions per day, compared with a manned vessel.
The array has since been extended and a further two data harvesting operations successfully carried out.
Read more here

Task – Subduction zone monitoring
Date – 2017
Customer – Geomar
Geomar Helmholtz Centre for Ocean Research in Kiel has been studying some of the globe’s most tectonically active areas by way of long endurance monitoring. Using our Autonomous Monitoring Transponders (AMTs) they created a monitoring array, the Geodetic Earthquake Observatory on the SEAfloor (GeoSEA) project, in 2,800-5,400 m water depth, offshore northern Chile on the Nazca-South American plate boundary. Data from the array was recovered by a US research ship using a Sonardyne HPT 7000 dunking modem deployed over the side, as well as GEOMAR’s GeoSURF Wave Glider, equipped with a 6G acoustic communication module fitted in its hull.
Uncrewed surface vehicle (USV) designer, builder and operator HydroSurv Unmanned Survey is joining forces with global marine technology specialist Sonardyne to develop and demonstrate transformative seabed-to-shore technologies for the offshore wind industry.
Through a collaborative project, part-funded by Innovate UK through its Robotics for a Safer World: extension project, HydroSurv’s REAV-40 USV will be paired with intelligent seafloor and vessel-mounted instruments from Sonardyne, alongside cloud-based services, to provide an end-to-end seabed-data-to-shore service.
This will include Sonardyne’s Mini-Ranger 2 Ultra-Short BaseLine (USBL) acoustic positioning system and its SPRINT-Nav hybrid acoustic-INS navigation instrument, which provides USV platforms with navigational redundancy both for when GNSS is compromised and where DVL bottom lock is out of range. Used in combination with Sonardyne’s seafloor sensors and access to cloud-based services, this package provides an integrated suite of capabilities to maximise the use of USVs in remote offshore environments.
Key elements of the new project include a self-transiting USV, acoustic positioning of and data harvesting from seabed instruments, real-time gathering of geo-referenced current profile data and live relay of information to operatives onshore through secure cloud-based systems. The project will also demonstrate the ability to overcome potential navigational limitations working in and around wind farms.
Founded in 2019, HydroSurv has seen rapid expansion of its technologies into inland and nearshore waters. This latest project, which officially launches in April 2021, will see the company now enter the offshore domain.
The culmination of the project will be a series of demonstrations at an operational offshore windfarm site within the UK.
[blockquote author=” David Hull, Founder & CEO at HydroSurv”]”The coronavirus pandemic has further underlined the benefit of using resilient USVs and flexible instruments, which enable continuous data-flow without sending personnel offshore. This has never been more important than today to safeguard routine monitoring and survey capabilities. Over the longer term, this approach will reduce the cost, risk, time and carbon footprint of gathering operational data.”[/blockquote]
“Combining USVs like HydroSurv’s REAV-40 with our seabed-data-to-shore technologies promises to bring a step change in the efficiency of asset monitoring and data gathering operations for the offshore wind industry,” says Geraint West, Global Business Manager, Oceanographic, at Sonardyne. “Using USVs, which can be deployed at short notice, can vastly reduce operator logistics, emissions, risk to humans and costs and will allow operators faster access to operationally important information about their wind farms.”
