
BP’s first foray into unmanned over-the-horizon operations, using Sonardyne technology and an unmanned surface vessel (USV), is helping it gather strategic data. It’s also a key step towards a more marine autonomous systems led future. Craig Allinson, Survey and Positioning Lead at BP North Sea, explains.
Throughout the life of a field, reservoir management strategies can change and, when they do, we need data to verify what impact we’re having. For the Machar field in the North Sea we changed our reservoir water injection strategy and we wanted to monitor its impact.
Specifically, we wanted an efficient way to keep a close eye on any seabed deformation in the field. Having considered unmanned operations for some time, we decided, in a first for BP, to use seafloor sensors combined with an unmanned surface vessel (USV), operated over the horizon, for data harvesting. We chose XOCEAN’s XO-450 USV (visit stand 1B57), fitted with a Sonardyne Mini-Ranger 2 6G Ultra-Short BaseLine (USBL) system. The Mini-Ranger 2 has modem functionality, so it can communicate with and retrieve data from Fetch low-power, long-life subsea sensor logging nodes, also from Sonardyne, that were chosen for our seabed deformation monitoring.
Using a USV for unmanned monitoring
The XO-450 is an International Marine Organisation (IMO) compliant, 4.5 m-long USV with a hybrid power system, including a diesel generator and solar panels, powering lithium-ion batteries to drive the electric thrusters and all instrumentation. The vessel has an 18-day endurance capability with communications (including dual redundant satellite communications systems), cameras (including thermal imaging) and navigation lights. It’s able to communicate real time with XOCEAN’s onshore control room, where pilots have a full view of all the systems and can take control at any time, 24/7, so we can use the vessel almost anywhere.

Sensor deployment and data retrieval
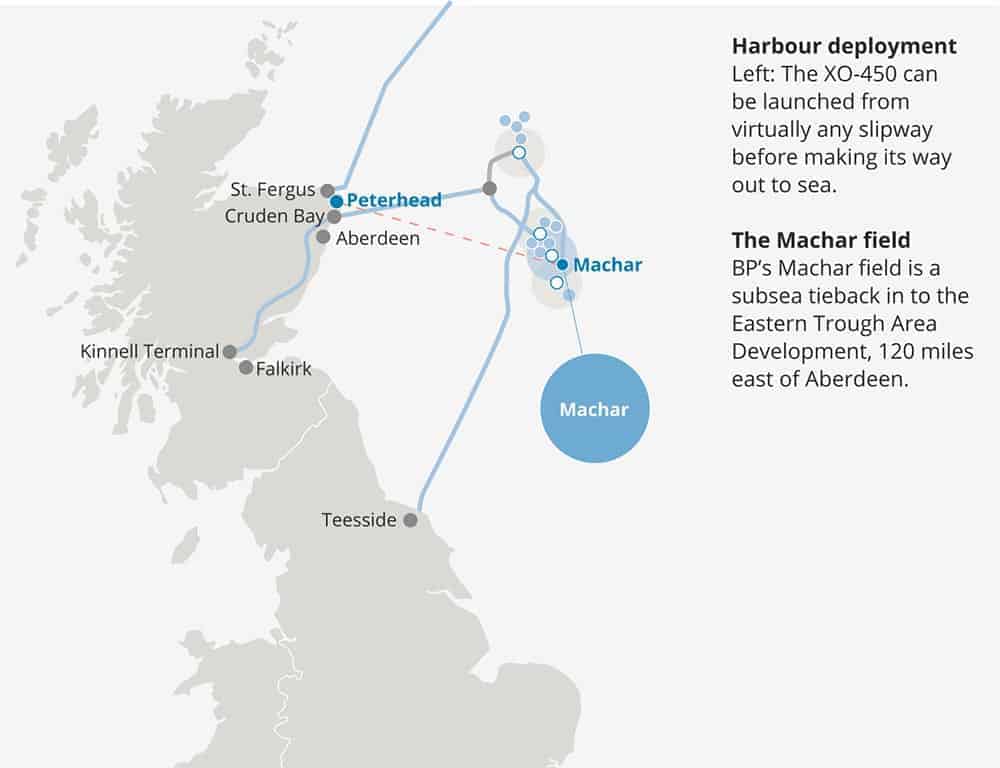
The project started in November 2018, when we installed four Fetch sensors over the Machar field. After a few months, we wanted to go out and harvest the data they had collected. So, in early April, the XO-450 was brought by trailer to Peterhead, Scotland, where it was launched from a slipway. The USV used waypoints to safely transit 120 miles out to Machar. Once on site, we located and then started communicating with each Fetch sensor, first to check its health and then to download its data, while the USV held its position, auto-piloting in a 25-30 m radius to let the Mini-Ranger 2 do its work.

After each download, the USV’s satellite communications sent the data to shore, where we confirmed, in real time, that we had the data we needed before moving on to the next Fetch. Throughout these operations, Sonardyne specialists were on hand (remotely) with full access to the XOCEAN real-time data to ensure the harvesting was successful and completed efficiently. When the operation was complete, the vessel transited safely back to Peterhead for demobilisation – within 40 hours of having set off.
Enabling SIMOPS
No project is that smooth of course. We had to wait for a suitable 5-day working weather window for the operation. It came during Ocean Business in Southampton, where the XO-450 was on show. With only a few hours’ notice, XOCEAN were able to drive the vessel up to Peterhead for mobilisation within 24 hours.
Once offshore, there was a light well intervention (LWI) vessel operating close to one of our sensors, which meant we had to negotiate going into their 500 m exclusion zone and perform simultaneous operations (SIMOPS). There was also a concern that the acoustics being used from the LWI vessel and ours – which were using the same frequency – could interfere with each other. So, we took a risk-based approach and started our data collection campaign from the Fetch that was furthest from the LWI vessel, keeping in continuous contact with its crew. There was no interference. We then got within 100 m of the LWIV to access to sensor closest to it and successfully harvested the data without any problems; a SIMOPS success. Had we not been using the USV we would not have been able to get as close to the fetch unit, because it was within the LWI vessel’s 500 m zone, and data harvesting of this unit may not have been possible.

Reducing HSE and emissions
A key reason for us going down this route, for using a USV over the horizon, was to eliminate health, safety and environmental (HSE) risk. Unmanned operations with a small vessel enable us to do that. They achieve a significant reduction in carbon emissions – compared with a manned vessel – and total elimination of the need for humans offshore for this type of work. We also get a significant cost saving, compared with using a conventional vessel.
BP have been pleased with the result of this operation and we have proven the concept of data harvesting with USV. We now have our data from the first harvest and the results are being assessed. The Fetch units are continuing to monitor the seabed at Machar, which will enable us to continue monitoring the seabed, harvesting data twice a year, using the USV, for some years to come.