






Why choose it?
Powerful onboard analytics – you can make decisions based on real behaviour, not assumption
Observer contains SmartCore, our advanced, modular central processing unit. It’s the system’s brain, delivering low power and high performance that supports deployments of up to 10 years, storing raw and analysed at source.
Apply your own algorithms or use histograms to support fatigue and damage estimation, putting analysis in your control and powering your digital twin. An intuitive, secure, web-based interface streamlines flexible configuration, driving faster decision making and lower operational costs.
Low and high frequency measurements in one device – no need for different systems
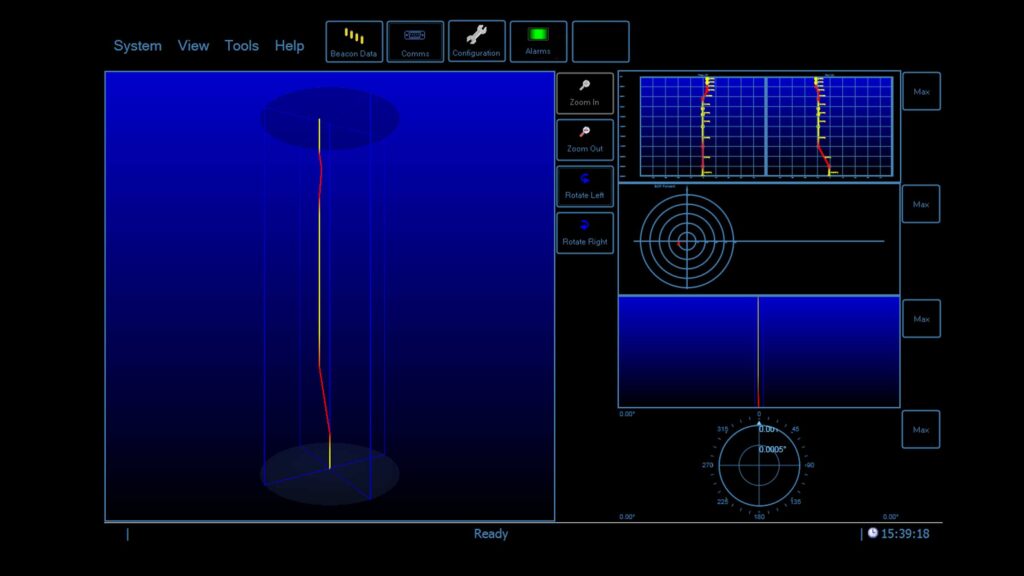
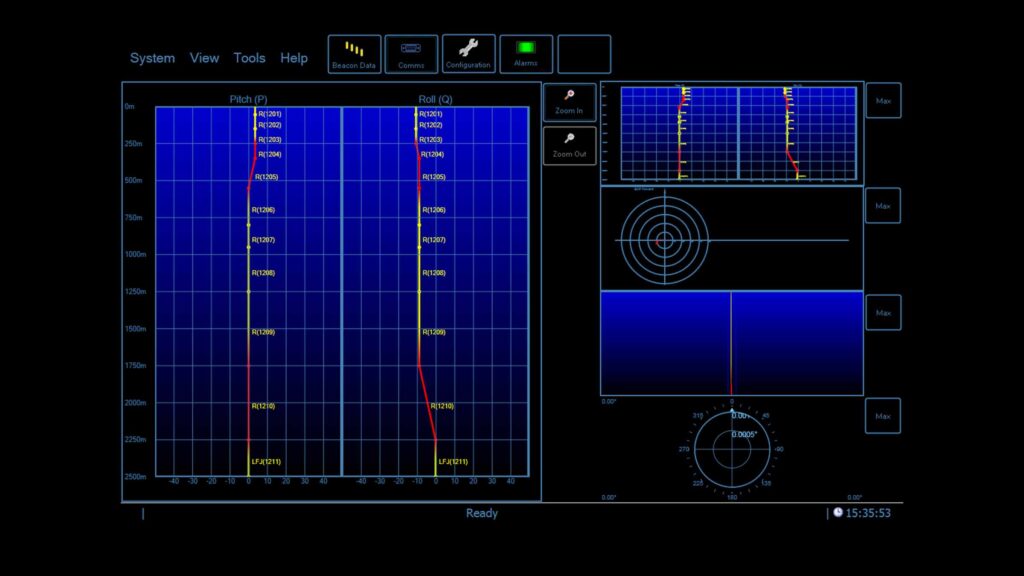
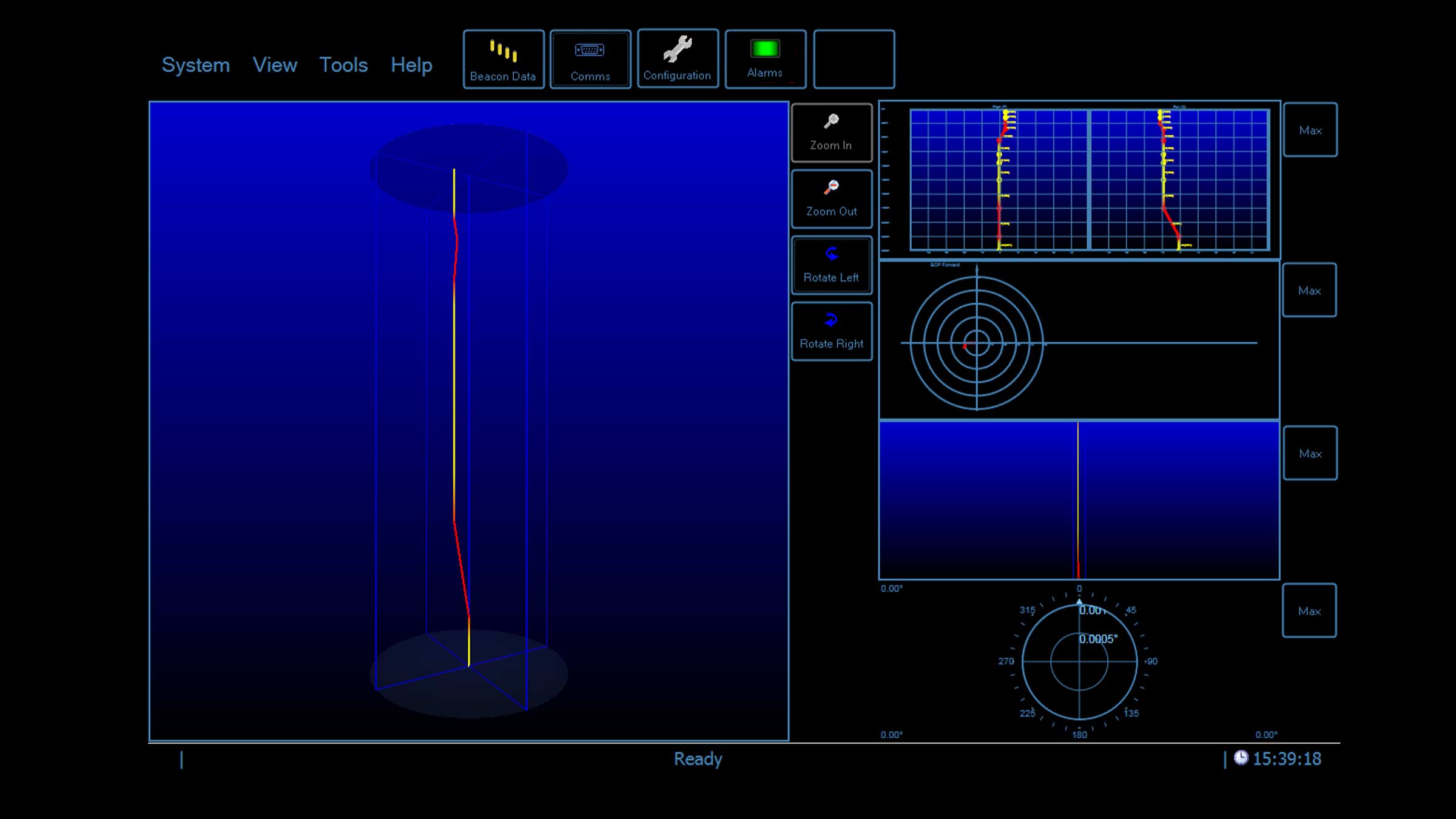
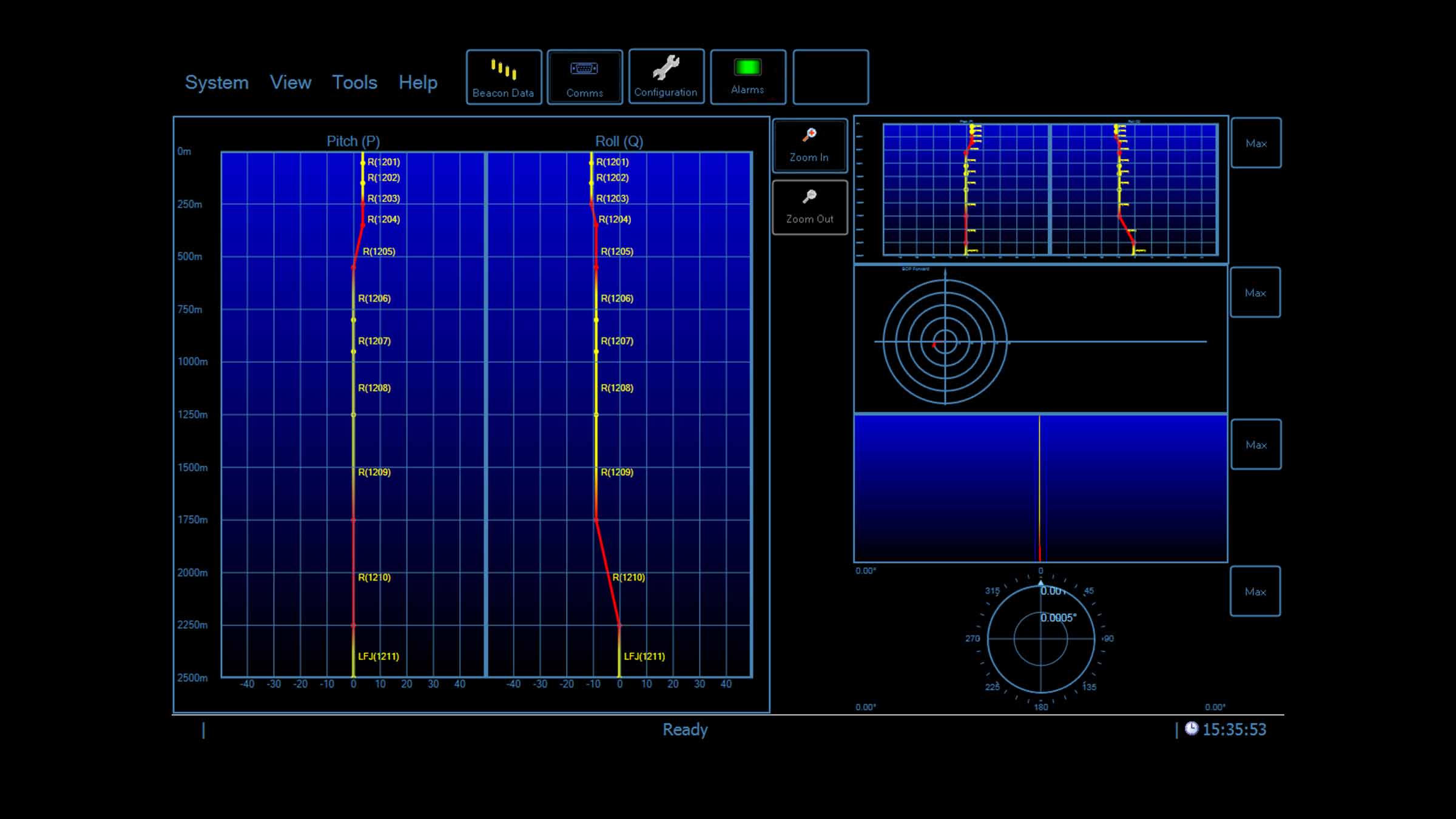
In-built sensors capture high-frequency motion for vortex induced vibration (VIV), flow-induced vibration (FIV) and structural behaviour monitoring. This combination simplifies and expands your ability to truly understand the behaviour of your infrastructure.
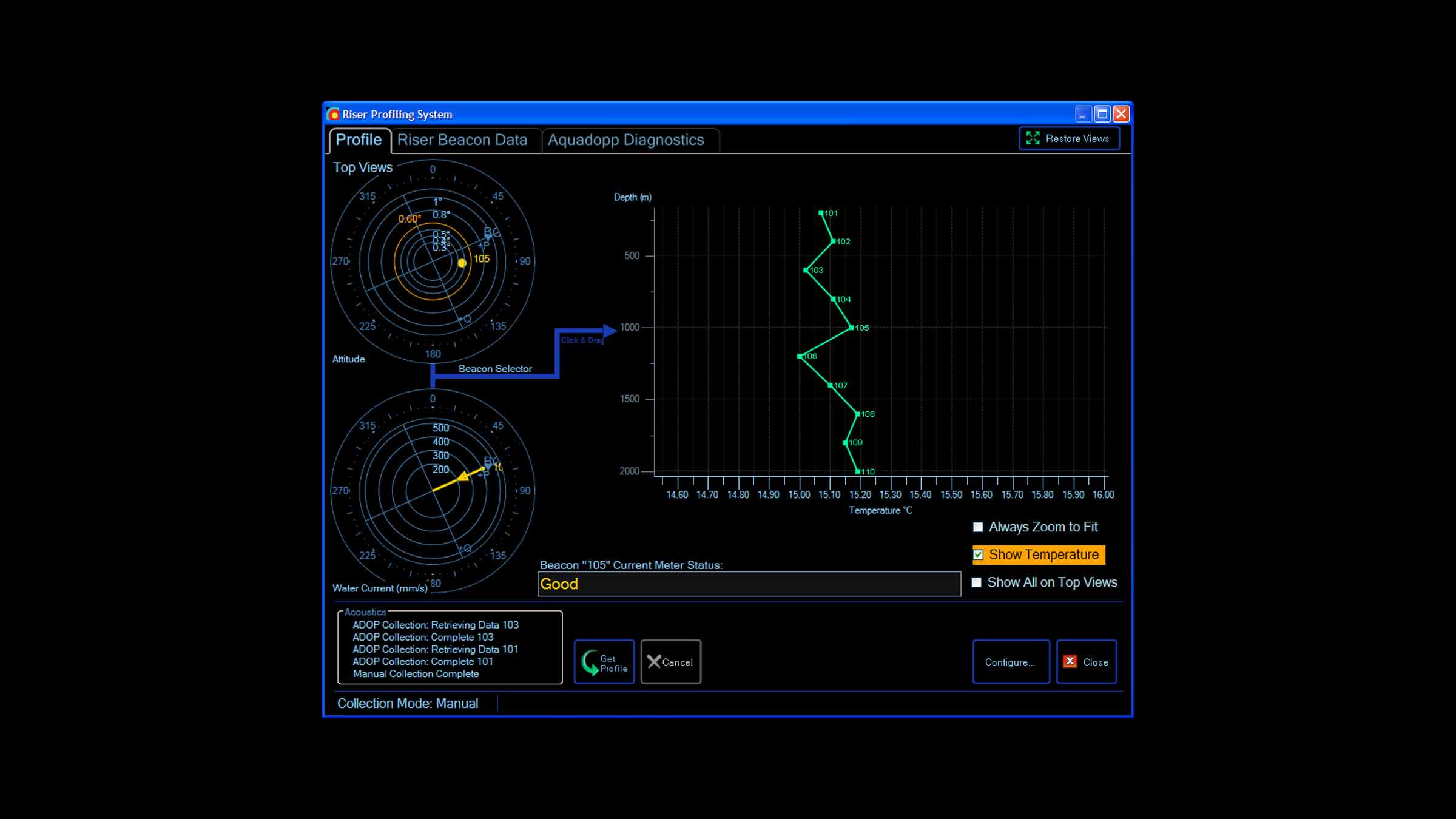
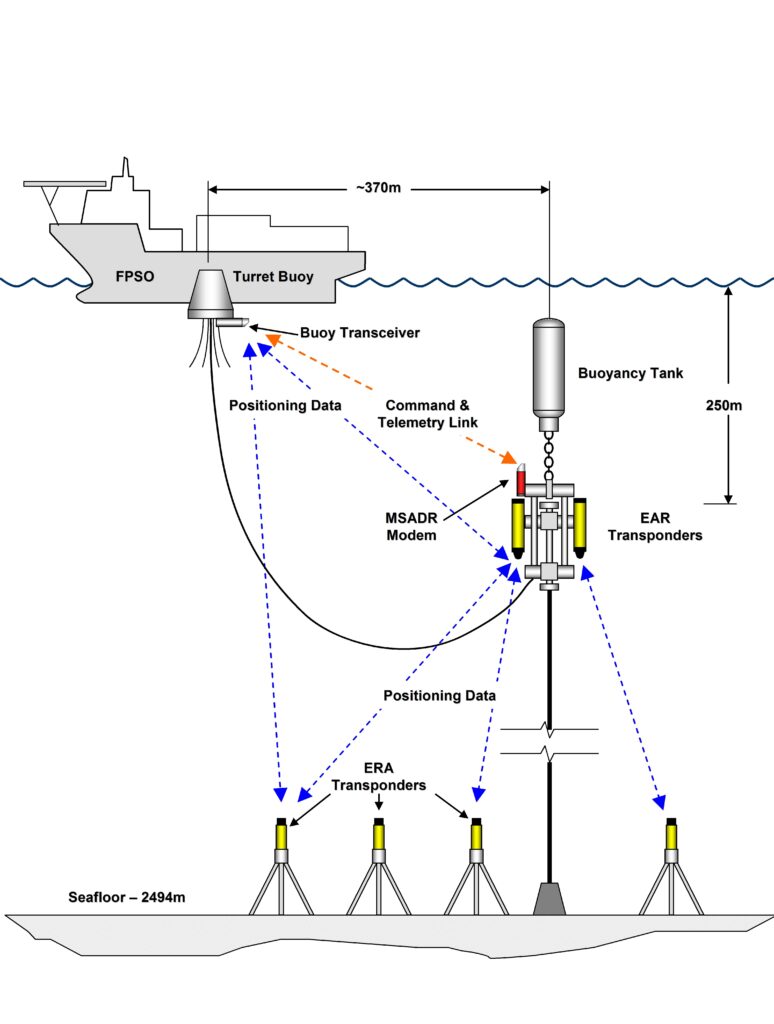
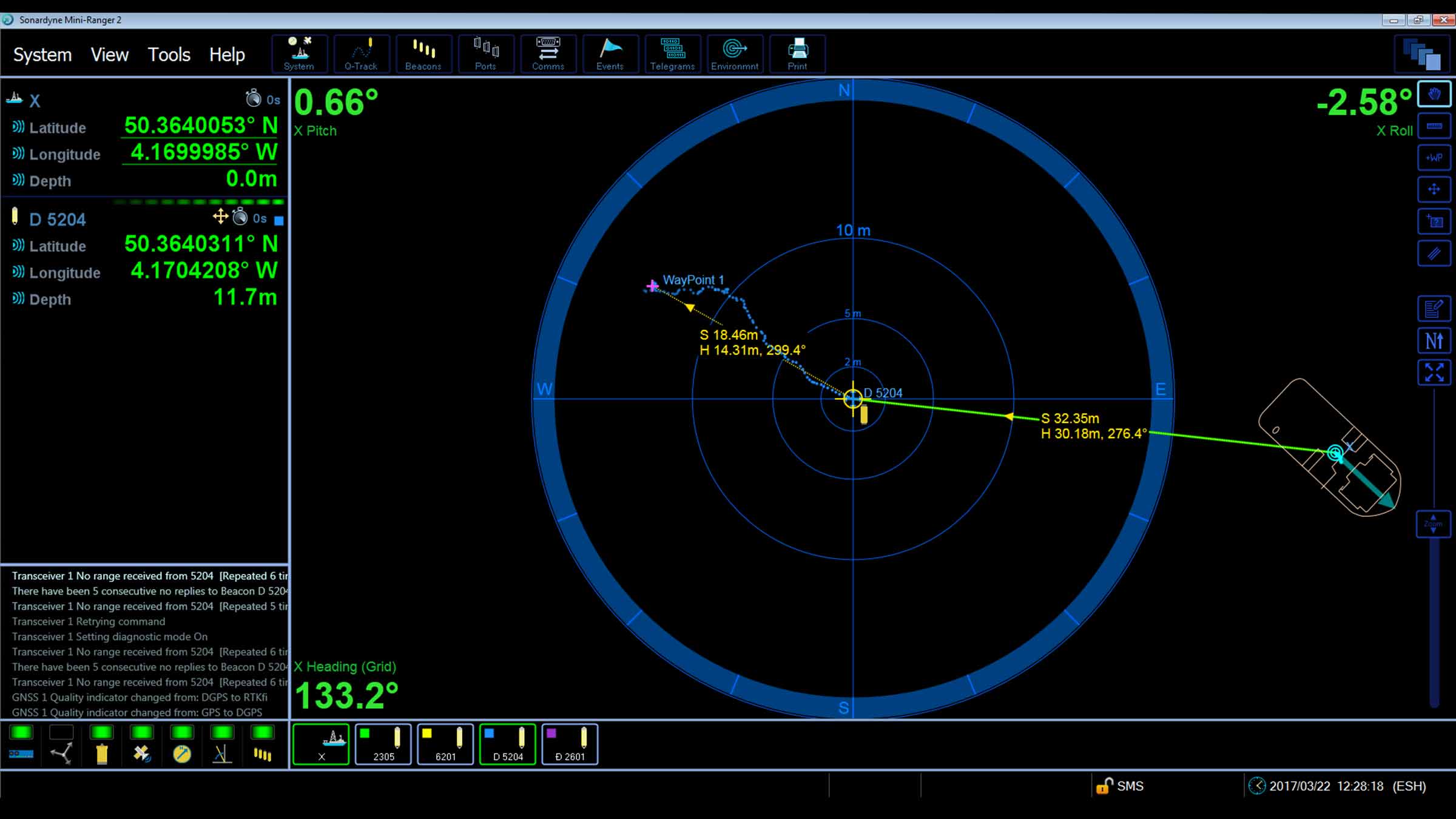
Observer can operate as a Long BaseLine (LBL) node for highly precise low-frequency motion monitoring such as pipeline creep and movement. It also supports Ultra-Short BaseLine (USBL) positioning, for measuring assets movements in the water column, like riser and umbilical movement. Also allowing data retrieval from a vessel or underwater vehicle.
Always informed. Always in control – flexible data retrieval
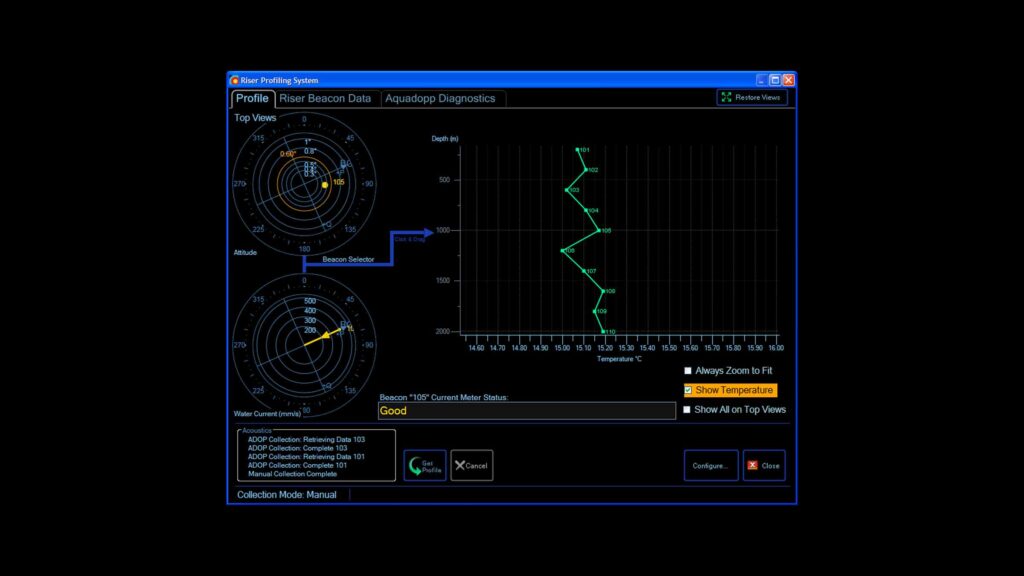
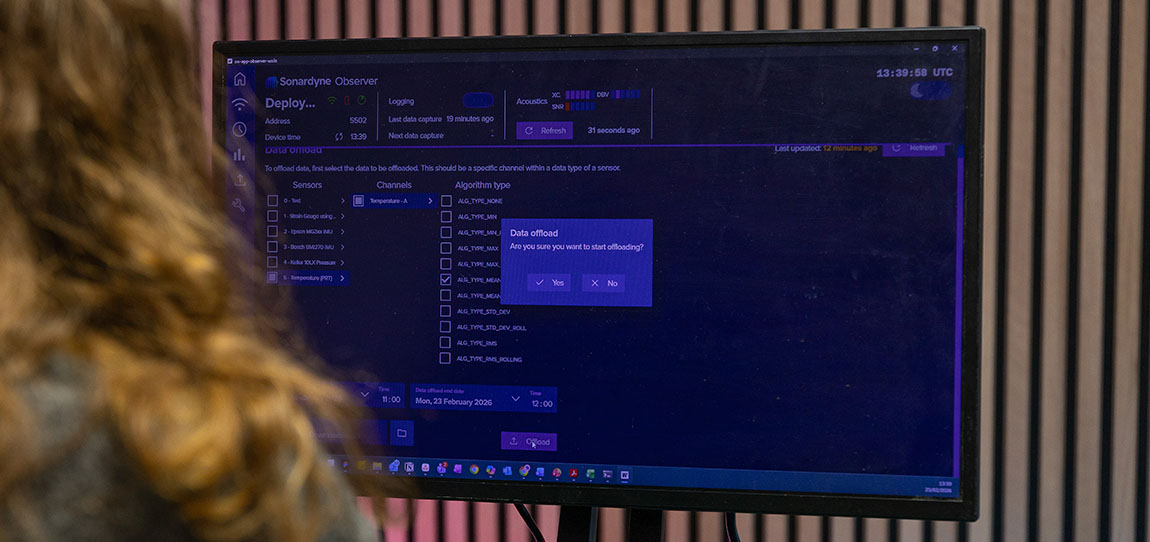
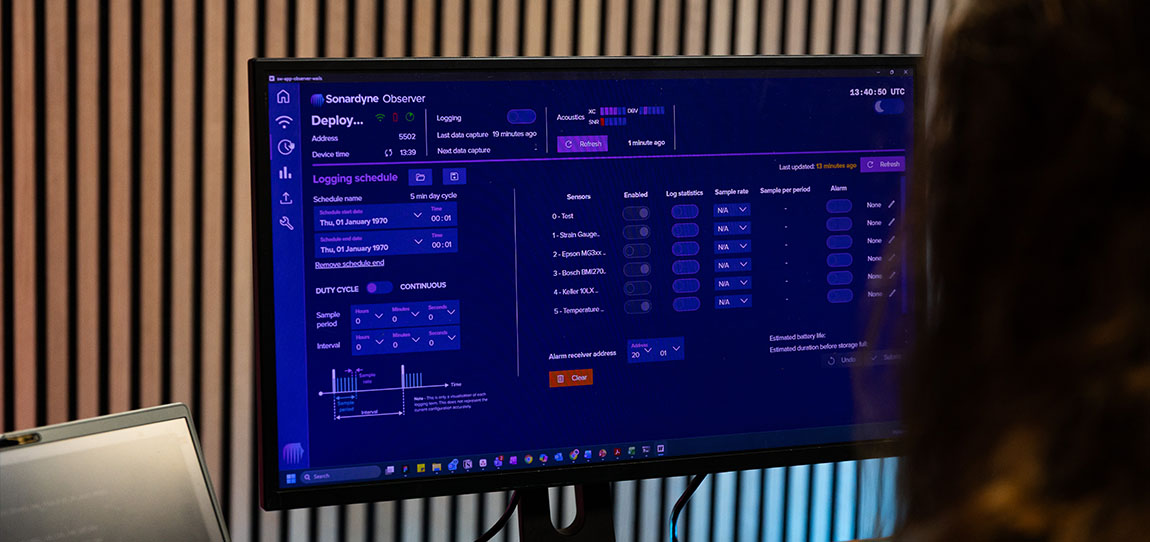
Easily setup, check your configuration and QC your sensor data pre-deployment, and also adjust it acoustically post-deployment, using our intuitive web user interface.
Set and modify data collection and offloading schedules at any time.
Our trusted acoustic telemetry provides your seafloor-to-surface communications, in all water depths, even in challenging acoustic environments.
Compatibility with our 6G ecosystem enables data transfer at up to 9,000 bps to topside transceivers and modems, including our HPT 5000, Modem 6+ and Dunker 6.
An Ethernet communication link allows larger quantities of data to be harvested directly from subsea control systems or subsea vehicles.