The hardest part of offshore CCS isn’t injecting CO₂—it’s proving it will stay put.
In the United States, offshore carbon capture, and storage (CCS) is moving rapidly from policy ambition to permitted reality.
A major US federal incentive, 45 Q, has been introduced, in part, to enhance CCS deployment, offering up to $85/tonne of carbon dioxide for geologic sequestration.
With these incentives, project economics are improving and offshore storage advancing through regulatory review, shifting the debate beyond whether CCS should happen.
The real question now facing operators and regulators alike is how containment is demonstrated—with confidence, transparency and long‑term accountability. That question is answered through monitoring.
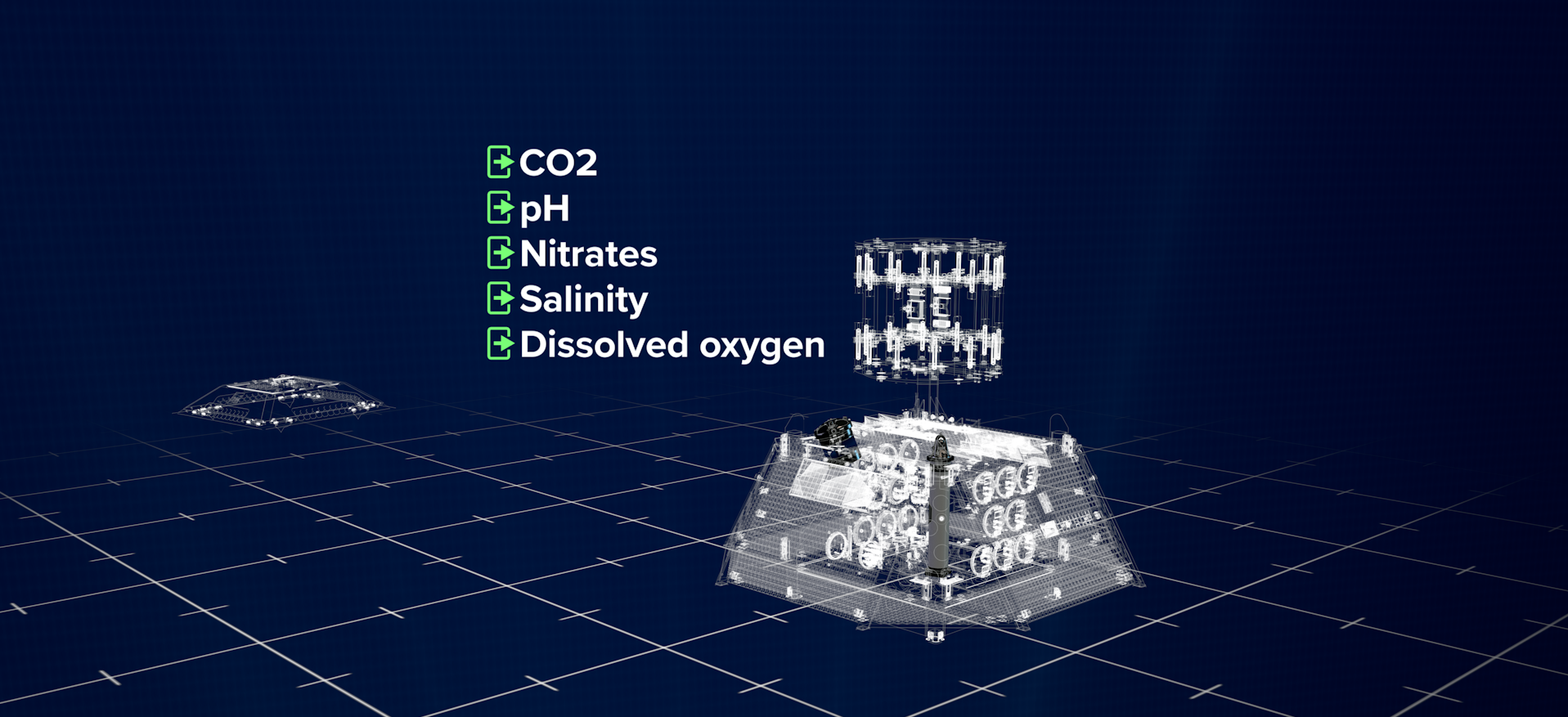
Why monitoring underpins offshore confidence
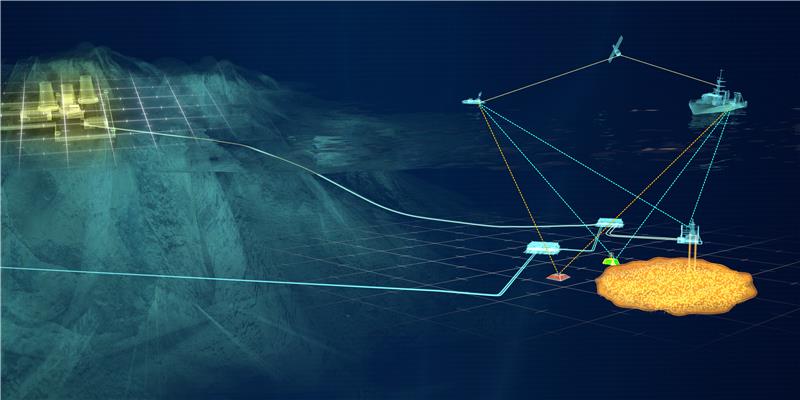
Offshore CO₂ storage offers immense geological capacity and the opportunity to reuse existing offshore infrastructure as part of a long-term emissions reduction strategy.
For the US offshore industry, CCS provides a promising growth opportunity and a way to reuse Gulf of Mexico expertise, infrastructure and subsurface know-how. But geological storage capacity alone does not build trust.
Operators, regulators and the public share a single expectation: injected CO₂ must remain safely contained for decades. Measurement, monitoring and verification (MMV) provides the evidence needed to confirm that expectation is being met and that storage behaves as modeled.