One of the early promises made by the advent of unmanned or autonomous underwater vehicle (UUV/AUV) systems was a world free of the need for costly surface support vessels. It’s a promise these vehicles have struggled to meet.
They have delivered value – in other ways. They offer a stable platform close to the seabed where they’re able to acquire high-resolution actionable data. But if you want to know very accurately where in the world that data is, a surface ship providing acoustic position updates is still part and parcel of the mission. These can be ships that are smaller and less costly than those required for conventional operations, but they are necessary.
In addition, if you want to use manipulators, like those used by remotely operated vehicle (ROV), there isn’t the bandwidth to provide the video feed that would enable the level of human-in-the-loop control needed to support complex operations.
So what are the options? How about replacing the support vessel and doing your over-the-horizon ROV or unmanned underwater vehicle (UUV) operations with an unmanned surface vehicle (USV)?
Over-the-horizon USV operations; what are the challenges?

In the ocean science community and the oil and gas industry alike, many missions require an ROV to dive, inspect and interact with its environment. How can we support these types of operations if we don’t want to use a ship?
Navies want to keep mine countermeasure (MCM) vessels away from the minefield. It makes their manufacture less costly. To make that concept of operation viable, UUVs and other so-called offboard assets will need to be managed from those MCM ships, which stay outside the field of operations. The challenge then becomes how to enable those MCM vessels to track and communicate with the offboard underwater assets over significant horizontal distances?
We’ve been scratching our heads trying to solve those challenges for our customers. Fortunately, we have come up with some neat solutions, which we think will add a lot of value to USV manufacturers. They will also help make the transition to truly unmanned ROV and UUV operations.
Unmanned, on-demand, remote ROV operations

This is not simple. USV designs capable of supporting ROV operations are a key consideration. However, we also need to make the ROV and USV combination an unmanned maritime system (UMS) capable of autonomous operation. How? They need to do what a UUV does: find their position in real-world coordinates and continually manage their actuators and thrusters to get to where they want to be. But they have to do this in partnership with a USV. How do we help? We provide hybrid navigators, like our popular SPRINT-Nav, and we can tie the relative position of the ROV to the surface vessel using our 6G Ultra-Short BaseLine (USBL) acoustic positioning systems.
L3Harris, who manufacture the C-Worker family of USVs, have worked with us on this. In the ARISE* project, they used our Ranger 2 USBL system and our Wideband Sub-Mini 6 Plus (WSM 6+) positioning beacons to acoustically track a Saab Seaeye Falcon ROV from one of their C-Worker 7 USVs. James Cowles, Business Development Manager at L3Harris, pointed out to me recently, “Autonomy will bring a range benefits to industry including reduced operational costs and fewer people working at sea. A key enabler for the interoperation of surface and subsurface autonomous systems is subsea positioning. The full benefits of collaborative autonomy will be realised through enabling the systems to understand each other’s relative position in complex environments of operation.”
Over-the-horizon control for UUV operations
As we’ve just seen, ROV systems working in tandem with USV systems are on their way to an autonomous future. To a degree, they have it easy – there is an actual cable physically connecting the ROV to the USV. This tether provides all the vital information required so that the autonomy engine can make the right decisions at the right time. With fibre optic cables you can share a lot of information. UUVs, on the other hand, don’t have a tether to connect them to the surface.
Acoustics come to the rescue here. We already use acoustics to track and communicate with UUVs from vessels of opportunity. Simply equip your UUV with an AvTrak 6 (our 3-in-1 USBL transponder, transceiver and modem, for acoustic navigation and communications) and deploy one of our USBL systems on the surface. You are set. Because both are based on our 6G hardware and use our Wideband 2 advanced digital signal protocols, you’ll be able to send your UUV reliable USBL position updates while simultaneously getting status updates from the UUV.
The next trick we need to perform to make this work on a USV is to make the human disappear, in other words take the human out of the loop.
How do we do this? We developed a remote control input, which we imaginatively coined Remote Control. Tom Bennetts, Applications Group Manager, explains it best: “Remote Control interfaces to the USBL systems via the serial or UDP COM port. The remote interface accepts input commands to the USBL and outputs UUV positions and SMS messages (Sonardyne speak for ASCII-Hex messages). A USV can use it to take control of the USBL and the UUV. Now you can talk to one UUV (read more here) or a swarm.”
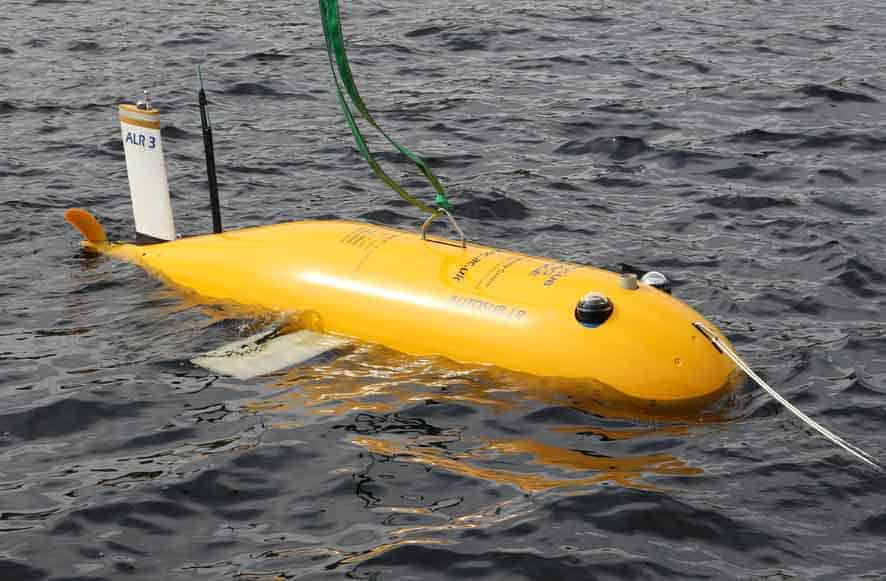
The technology has been put the test. Again, it was L3Harris who we worked with early on. Their USV, this time a C-Worker 5, was used to track and communicate with an Autosub Long Range (ALR), a UUV manufactured by the UK’s National Oceanography Centre. The project was called Autonomous Surface/Subsurface Survey System or ASSSS. James Cowles points out, “ASSSS demonstrated that USV systems can increase the effectiveness and efficiency of UUV systems by providing up to date position information. This enables operations without a mothership even during over the horizon operations. We are already working towards making this technology much more widely available.”
What does it all mean?
Whether you are looking to track an ROV or a UUV from a USV, we’ve got you covered. Our systems can be upgraded with a Robotics Pack that unlocks the Remote Control feature. Talk to us if you would like to find out more.
*Autonomous Robotic Intervention System for Extreme Maritime Environments (ARISE). Read more here: https://www.asvglobal.com/arise/
A pioneering marine research expedition into one of the most bio-diverse regions on the planet will start in the Indian Ocean later this month. Using a highly advanced manned submersible, the mission will explore the ‘Midnight Zone’; a region between 1,000-4,000 m deep beneath the waves.
At this depth, there is no light. That means there are no plants or phytoplankton and that all animals are either predators or scavengers. It makes for a hugely rich and yet still largely under explored habitat.
 Which is why it’s at the heart of the Nekton Foundation’s latest mission, First Descent: Midnight Zone, and we’re proud to be playing a key role in it. The mission, being run in partnership with the governments of the Seychelles and Maldives, will focus specifically on seamounts in the Indian Ocean’s Midnight Zone. These are often described as undersea “Galapagoses”, thanks to the richness of life that inhabits them. Yet, fewer than 300 of the estimated 200,000 seamounts globally have been explored, so there are potentially millions of species that remain undiscovered.
Which is why it’s at the heart of the Nekton Foundation’s latest mission, First Descent: Midnight Zone, and we’re proud to be playing a key role in it. The mission, being run in partnership with the governments of the Seychelles and Maldives, will focus specifically on seamounts in the Indian Ocean’s Midnight Zone. These are often described as undersea “Galapagoses”, thanks to the richness of life that inhabits them. Yet, fewer than 300 of the estimated 200,000 seamounts globally have been explored, so there are potentially millions of species that remain undiscovered.
Nekton’s aim is to document changes beneath the waves in a bid to catalyse 30% protection of the Indian Ocean by 2030. During the mission, a team of 50 international scientists, technicians, media and crew will be carrying out research to gather critical data required for defining conservation and management priorities and the designation of Marine Protected Areas.
Communicating ocean science and positioning underwater vehicles
It’s pioneering work and we’re pleased to again have a key role in supporting Nekton’s First Descent missions. As you may remember, last year our BlueComm underwater optical communications technology helped make Nekton’s First Descent: Seychelles a huge success. By enabling Nekton mission scientists, as well as international news presenters and the president of the Seychelles, to broadcast live from an un-tethered submersible beneath the waves, Nekton’s mission was communicated globally. In fact, the feat has since won two international broadcasting awards and has been nominated for others, including an engineering award.
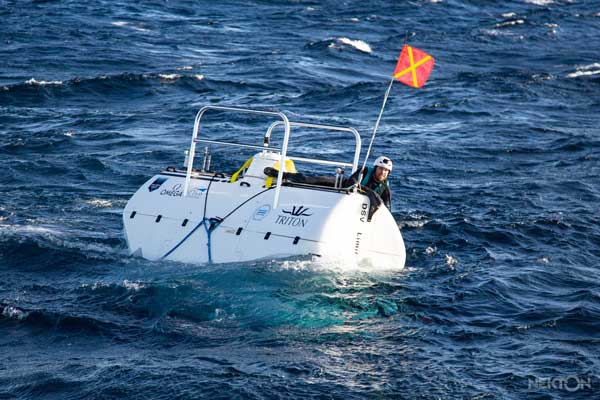
This year, Nekton’s Midnight Zone mission presents a different challenge, with operations taking place at 10 times the depth of the 2019 mission. This has meant the use of a much more advanced submersible than last year – the Limiting Factor. It’s an impressive vehicle. It recently completed the first manned dives to the deepest point in each of the world’s five oceans on the Five Deeps mission. Capable of diving to depths of 11,000 m, the Nekton Midnight Zone mission will be well within its capabilities.
 For this reason, Nekton have opted to use our Ranger 2 Ultra-Short BaseLine (USBL) system to provide underwater positioning for the Limiting Factor. This high-performance system is a perfect fit for the mission; it’s able to track platforms and vehicles to beyond 6,000 m slant range. High accuracy and fast update rates mean that it’s ideal for de-risking a critical subsea operation, such as this manned deepwater mission.
For this reason, Nekton have opted to use our Ranger 2 Ultra-Short BaseLine (USBL) system to provide underwater positioning for the Limiting Factor. This high-performance system is a perfect fit for the mission; it’s able to track platforms and vehicles to beyond 6,000 m slant range. High accuracy and fast update rates mean that it’s ideal for de-risking a critical subsea operation, such as this manned deepwater mission.
The Limiting Factor will be fitted with our AvTrak 6 underwater vehicle tracking transceiver/transponder, which provides acoustic communications as well as positioning. On the surface, the expedition’s mother ship, the DSSV Pressure Drop, is unfortunately not dynamically positioned, which means that a rigid hulled tender Little Rascal, will be instead be used as the platform for positioning the submersible due to its greater maneuverability.
Easy to fit, high-precision acoustic positioning
This gives rise to a number of challenges including size, vessel motion and lack of space to mobilise equipment. For this reason, we’ll be providing our new, second generation, Gyro USBL – in fact Nekton will be one of the first to use this lighter and more compact version of our Gyro USBL.
Our Gyro USBL overcomes the challenges of mobilising quickly and on a vessel of opportunity in a stroke. That’s because Gyro USBL tightly couples our High Precision Transceiver (HPT) acoustic transceiver and Lodestar AHRS (attitude and heading reference system) in one system. So there’s no need to worry about fitting other systems to the tender to correct the USBL system for vessel motion. Everything is in one unit, which means that Nekton will have a quick and easy to mobilise high-performance system.
 What’s more, our new second generation Gyro USBL is 30% shorter and 40% lighter than the first generation, so it’s easier to handle and install, making it an ideal plug-and-play option for installing in a wide variety of vessels, including as Little Rascal.
What’s more, our new second generation Gyro USBL is 30% shorter and 40% lighter than the first generation, so it’s easier to handle and install, making it an ideal plug-and-play option for installing in a wide variety of vessels, including as Little Rascal.
Nekton will also use our ViewPoint subsea navigation software to remotely relay the submersible’s position from the tender to the DSSV Pressure Drop.
It’s going to be a busy month for the Nekton team, as they head out to their research site and start their 35-day expedition. We can’t wait to see and hear what they come up with.
High-accuracy, long-endurance underwater instrumentation from Sonardyne Inc. is set to play a major role in helping scientists across the US better understand and possibly predict earthquake and tsunami risk at a far greater scale than has been possible before.
Scripps Institution of Oceanography, through a US$5.5 million grant from the US National Science Foundation (NSF), is procuring equipment to be used by the broader scientific community to study seafloor deformation. Comprising of more than 50 Sonardyne Fetch subsea sensor logging nodes, this major new equipment pool will also include Sonardyne’s advanced acoustic positioning modules fitted to three Liquid Robotics Wave Gliders.
These will, for the first time, make highly precise seabed monitoring capability – at scale – available to the entire US earth science community using a technique known as GNSS-A.
GNSS-A combines GNSS-derived surface platform positions with acoustic ranging to seafloor sensors, enabling scientists to make centimetre-level and globally referenced measurements of movement across geological features such as subduction zones, which can cause potentially catastrophic earthquakes and tsunamis.
Unlike on land where these observations are easily acquired using the GNSS network, this level and type of measurement has been either too costly or too impractical to acquire subsea. This has resulted in there being almost no seabed geodetic information, which has limited understanding of the geological mechanisms at work.
“This lack of seabed geodetic data has been a real challenge for scientists,” says Geraint West, Global Business Manager Oceanographic, at Sonardyne. “With access to Wave Gliders, to make the highly accurate measurements to our Fetch sensors, the ability to link subsea measurements within a global reference frame is now practical and affordable. What’s more, we’re able to do this over long periods of time, taking the detailed measurements that are needed over decadal timescales.”
[blockquote author=”David Chadwell, Research Geophysicist at the Marine Physics Laboratory at Scripps”]”Seafloor geodesy is poised to be transformative. It will allow for a broad community of existing and next-generation earth scientists to study active deformation on the seafloor. Improved access to these instruments will foster and communicate knowledge of the new methods and science outside of the current and very small marine community, to a much larger scientific community primarily consisting of highly-skilled land-based geodesists, and an inclusive next-generation scientific workforce.”[/blockquote]
“To date only one prototype vehicle and approximately a dozen seafloor transponders have been available for the scientific community,” says David Chadwell, Research Geophysicist at the Marine Physics Laboratory at Scripps. “This project will add 51 additional seafloor instruments together with three new robotic platforms for making the required measurements. This will approximately quintuple the equipment available to the research community to make these important measurements.
“Seafloor geodesy is poised to be transformative. It will allow for a broad community of existing and next-generation earth scientists to study active deformation on the seafloor. Improved access to these instruments will foster and communicate knowledge of the new methods and science outside of the current and very small marine community, to a much larger scientific community primarily consisting of highly-skilled land-based geodesists, and an inclusive next-generation scientific workforce.”
Stephen Auld – Global Business Manager – Subsea Asset Monitoring
As I discussed in my previous blog, while operators do take care to prevent leaks from occurring, they can and do happen. When they do, they reach the public domain with the understandable and expected negative response and the resulting financial consequences on the companies involved.
Early identification and location of a leak can mitigate the impact. But, depending on the type of asset that needs monitoring or where a seep or leak is thought to be, very different approaches may need to be taken to ensure a timely intervention.
Previously, I identified two types of asset, each of which requires a different monitoring strategy. The first strategy, which I have already covered in detail here, is for specific assets, such as wellheads and their associated structures, which are contained within a limited area. For these, continuous, static, 360 degree monitoring, using our Sentry IMS, provides an automated, near real-time early warning system for any integrity breaches. Continuous monitoring could be employed throughout field life or during a specific phase, such as drilling, as you can read more about here.
Wide area coverage
 The second type of asset, which I’ll cover in this article, is for wider seabed areas, where hydrocarbon or CO2 seepage can occur anywhere within the wider field development. This could be naturally or from an inability to control the reservoir or overburden pressure, or where monitoring is required at emergent underwater carbon capture and storage (CCS) sites. It could also be where subsea infrastructure is more widely distributed, such as along pipeline corridors.
The second type of asset, which I’ll cover in this article, is for wider seabed areas, where hydrocarbon or CO2 seepage can occur anywhere within the wider field development. This could be naturally or from an inability to control the reservoir or overburden pressure, or where monitoring is required at emergent underwater carbon capture and storage (CCS) sites. It could also be where subsea infrastructure is more widely distributed, such as along pipeline corridors.
Where natural seepage or leaks occur at an unknown location across widely spread infrastructure, mobile monitoring is the preferred, if not the only, solution. Critical to this strategy, however, is the ability to cover wide areas and gather high resolution data efficiently. This means a need for low power but high resolution imaging systems, compatible with and capable of automated leak detection and reporting.
Solstice – multi-aperture sonar
That’s where our Solstice multi-aperture sonar (MAS) comes in. It’s low power, using just 18 Watts, but packs a punch, covering an impressive 200 m wide swath with an unrivalled 0.15° along-track resolution. Combined, these attributes make Solstice ideal for use on low power, long-endurance autonomous underwater vehicles (AUV) and where area coverage rate (ACR) and low false detection rates are key.
Quite simply, Solstice can map more – and more accurately. This is because it uses a back-projection beamforming technique to focus at every single pixel in the image, as well as accounting for platform motion to produced amazing undistorted imagery with real-time array calibration. With more accurate data, you improve the probability of positive detections using carefully designed and tested on board computer aided detection and classification (CAD/CAC) and automatic target recognition (ATR) algorithms. Better detections mean you get the results you need faster. This is why Solstice is a popular tool in mine hunting operations – where time is critical.
Real-time dynamic underwater leak detection
 For both leak detection and mine hunting applications, the ATR algorithms ‘score’ detections or regions of interest and then save small ‘snippets’ of metadata along with the sonar image data. During the AUV mission these snippets can be automatically transmitted to a following USV or conventional vessel or, alternatively, downloaded when the AUV surfaces. From there these snippets can be sent to shore, via satellite for further interpretation. Onshore, an operator can then request the highest scoring leak images, allowing a high confidence of detection while the survey progresses.
For both leak detection and mine hunting applications, the ATR algorithms ‘score’ detections or regions of interest and then save small ‘snippets’ of metadata along with the sonar image data. During the AUV mission these snippets can be automatically transmitted to a following USV or conventional vessel or, alternatively, downloaded when the AUV surfaces. From there these snippets can be sent to shore, via satellite for further interpretation. Onshore, an operator can then request the highest scoring leak images, allowing a high confidence of detection while the survey progresses.
What’s more, other sensors can also be fitted to your AUV, such as physical and chemical instruments, which, along with the Solstice and navigation data, can also be processed in real-time to cross-reference and validate any detected anomalies for sending back to shore via satellite.
Pre-emptive or reactive leak location
The data is impressive, the low power budget is impressive – and it all comes in a just 682 mm-long, 95 mm deep, 760 g (2.11 kg in air) package. This provides options. On a long endurance AUV, the low power consumption enables significant areas to be covered over extended time periods. On a smaller AUV, its small footprint means you can also quickly mobilise a detection capability capable of covering a large area in a small period of time. So you can both have a persistent monitoring presence in your field or quickly and cost-effectively deploy a leak detection asset to a problem area to locate an integrity breach.
Methane and CO2 subsea seep detection
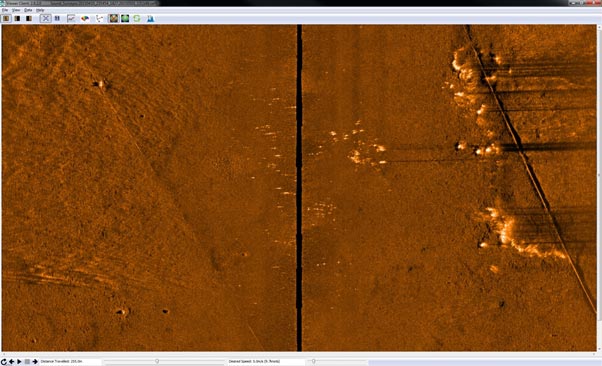
 Solstice is proven. It’s already been used on a number of projects detecting both simulated CO2 leaks in the North Sea and natural methane seeps. During a methane seep detection project we were tasked with detecting naturally occurring seeps from the ocean floor offshore California. As shown in the image above (at 200 m swath), side scan data collected from a Solstice mounted on a Bluefin AUV, the shape and height of the methane plumes close to a pipeline are clear as indicated by the numerous horizontal dark shadows crossing the diagonal pipeline on the starboard channel. Some of the seeps can also be seen to be emanating from pockmarks further away from the pipeline, i.e. closer to the AUV centreline.
Solstice is proven. It’s already been used on a number of projects detecting both simulated CO2 leaks in the North Sea and natural methane seeps. During a methane seep detection project we were tasked with detecting naturally occurring seeps from the ocean floor offshore California. As shown in the image above (at 200 m swath), side scan data collected from a Solstice mounted on a Bluefin AUV, the shape and height of the methane plumes close to a pipeline are clear as indicated by the numerous horizontal dark shadows crossing the diagonal pipeline on the starboard channel. Some of the seeps can also be seen to be emanating from pockmarks further away from the pipeline, i.e. closer to the AUV centreline.
In another project, Solstice’s ability to detect CO2 leaks was put to the test. A test target emitting 15 litres of carbon dioxide a minute was placed on the seafloor for the trial. Our Solstice imagery clearly shows the plume rising up from the seabed by the shadow it casts caused by the obstruction it makes in sonar data return. You can read more about that project here.
Solstice

Image Courtesy of General Dynamics
Solstice is also regularly used in other AUV-based seabed search and mapping operations, such as mine detection. In fact, Solstice comes as standard on General Dynamic’s Bluefin-12 and Bluefin-9 AUVs. And, onboard the Bluefin-9, it’s the most powerful sensor package for a two-man portable AUV.
Solstice offers data quality and resolution like no other side scan sonar of the similar size, weight and power. This means you can respond faster, cover more of your assets for less, long term, and with high confidence in the results.
For oil majors’ who have environmental awareness and hydrocarbon containment firmly in their sights for 2025, these are tools that can realise that vision today. Automated monitoring with Solstice is here, proven and available.
All USBL systems calculate position by measuring the range and bearing from a vessel-mounted transceiver to an acoustic transponder fitted to a moving target or placed on the seabed.
Here we offer five top tips on how to get the best out of your USBL systems and make sure your tracking performance in shallow water is trouble free. You can also watch our quick video, below.
Top tip #1
Consider where to deploy your transceiver. Is it on a rigid pole? Mounting your transceiver on a rigid pole will improve the performance of your system in any depth of water, not just shallow water.
Top tip #2
 Make sure there’s enough distance between your vessel hull and your transceiver. This will reduce the amount of background noise from your vessel that interferes with your USBL positioning. Also, consider where on your vessel to put your transceiver. Try to avoid deploying it near the propeller because the noise and aeration from it will affect system performance.
Make sure there’s enough distance between your vessel hull and your transceiver. This will reduce the amount of background noise from your vessel that interferes with your USBL positioning. Also, consider where on your vessel to put your transceiver. Try to avoid deploying it near the propeller because the noise and aeration from it will affect system performance.
Micro-Ranger 2 is already optimised for shallow water tracking. However, if you’re tracking with Mini-Ranger 2 at an elevation angle above 30 degrees, make sure you have depth aiding turned on at the beacon you’re tracking. This is easy to do. Just go to the beacon table in your Micro-Ranger 2 software, click on the sensor tab and then select the sensor from the depth aiding drop down. It’s also important to turn off depth aiding when you’re tracking underneath the vessel.
Top tip #3
Shallow water environments are by their very nature highly variable. Consider the environment you’re working in and pick the system setting that suits it best in order to optimise performance. For example, if you’re working in a noisy environment, such as waves or rain, you might want to set your beacon power levels to high. This will aid the acoustics to cut through that background noise and make sure they’re detected.
If you’re working in very calm water or near structures or walls of docks, for example, this may result in echoes and reverberation. In this environment, it’s best to set your power levels to ultra-low. This will avoid the echoes giving you false detections, so you’ll get much more accurate tracking. You can change a beacon power by opening the beacons table, then clicking on the advanced settings tab and selecting the power level you want from the drop down menu.

Top tip #4
If you’re always tracking a target at the stern of your vessel at high elevation, such as a tow fish, you might want to tilt your transceiver head towards your target. This will increase sensitivity in that direction and improve performance. However, seek advice because if this is implemented poorly it may result in increased background noise and reverberation. You can also use a 30 degree adaptor flange to point the transceiver back to the target.
Remember, Micro-Ranger 2 is already optimised for shallow water tracking, so tilting the head is not required. And, as we outlined in tip #1, care should be taken on the position of the transceiver to make sure you don’t introduce any more internal noise into the system. Also, if you tilt the transceiver head, remember to turn the depth aiding off.
Top tip #5
The type of beacon you use can be critical. Omni-directional beacons are used extensively in shallow water tracking and their performance can be optimised in the way we’ve described above. However, sometimes a directional beacon may be your best option, especially in high elevation high noise acoustic environments. These beacons focus their acoustic energy to make them much more detectable, giving you more robust tracking in those situations.
We hope these tips have been useful. If you have any questions, please don’t hesitate to get in touch. We’re here to help you get the best out of your Sonardyne USBL system.
Underwater diver detection sonar technology from Sonardyne Inc. has been chosen by yacht security specialist Frankentek Inc. for their latest new-build superyacht surveillance and protection project.
Sentinel Intruder Detection Sonar (IDS) will provide security personnel on the unnamed vessel with a clear and early warning of any underwater threats, such as divers, swimmers and drones, approaching the yacht or entering a restricted area, ensuring owner, guest and crew safety and privacy.
Sonardyne’s Sentinel is the most widely deployed commercial off-the-shelf (COTS) underwater IDS technology on the market, with a proven ability to recognise genuine targets with intent and non-threats, such as large fish or pleasure craft, in a wide range of operational environments.
Suitable for both permanent and temporary vessel installation, Sentinel detects, tracks and classifies underwater threats around 1 mile away (up to 1.5 km) range to provide a rapidly deployable perimeter intrusion capability to help safeguard large private yachts when at anchor or berthed in a marina. It is also regularly supplied to protect busy commercial ports, naval bases, VIP waterside residences and critical national infrastructure facilities including power stations and desalination plants.
Frankentek, based in Medford, New Jersey, has over 30 years of experience working with owners’ representatives, designers, shipyards and system integrators to deliver, install and support bespoke security installations for the international superyacht community.
[blockquote author=” Marc Franken, President, Frankentek”]”From our experience with all brands of sonar-based diver detection systems, we have the most confidence with Sonardyne’s Sentinel IDS. This is experience that has been proven on other build projects that we have done, as well as diver tests we’ve witnessed.”[/blockquote]
Dan Zatezalo, Technical Sales Manager – US Maritime and Defense, at Sonardyne Inc. in Houston, says, “There’s a tendency to think of private yacht security only in terms of above-the-water solutions such as CCTV, lighting, access control and personnel. But this is an oversight, as the threat from under the water, be it someone with scuba equipment or controlling a drone, is as great – if not greater, than someone approaching in a yacht in a small RIB. That’s where Sentinel comes in. It reliably detects underwater intruders in real-time at long range providing ample time for security personnel to react. With more than 150 systems installed worldwide and an unrivalled reputation, it is the undisputed leader in the field.”
New standards in long-endurance underwater navigation and automated subsea positioning have been set following the successful completion of a joint project led by subsea technology specialist Sonardyne International Ltd., with partners the National Oceanography Centre (NOC) and L3Harris.
The two-year, £1.4 million Precise Positioning for Persistent Autonomous Underwater Vehicles (P3AUV) project, part funded by Innovate UK, set out to integrate existing and emerging technologies to deliver a step-change in unmanned platform endurance and navigational precision.
In addition, the project also set out to increase the use of autonomy in offshore survey positioning operations using unmanned surface vessels (USVs), and in the process reducing risk to personnel, environmental impact and operating costs.

The final project trials, which also saw one of the NOC’s largest deployment of AUVs operating in swarms, were completed this month (December) in Loch Ness, Scotland.
“Sending autonomous and unmanned underwater vehicles (AUV/UUVs) out on missions that will last for weeks or even months, unaided by crewed ships is a shared vision held by the ocean science, offshore energy and defence sectors,” says Geraint West, Sonardyne’s Global Business Manager for Ocean Science. “But, current constraints on AUV or UUV operations, such as onboard battery capacity and navigational accuracy degradation over time, has meant that the role these vehicles have had to play has been largely restricted to relatively short deployments.
“As the only company that produces an all-in-one hybrid acoustic-inertial-Doppler navigation and communication solutions for AUVs and USVs, we were uniquely placed to collaborate with the NOC and L3Harris to realise the ambitious aims of the P3AUV project.
[blockquote author=” Geraint West, Sonardyne’s Global Business Manager for Ocean Science”]”By developing and integrating each organisation’s technologies, including our own SPRINT-Nav navigation instrument, we’ve proven it’s possible for underwater platforms to make more of their available onboard power and maintain navigational accuracy over long distances without external aiding.”[/blockquote]
“We’ve also proven the capability to autonomously calibrate networks of seafloor positioning transponders with an L3Harris C-Worker 5 USV to make offshore survey and construction operations faster and easier,” says West.
Using autonomous calibration techniques will remove the need for a manned vessel to perform this task, removing people from harms’ way, driving down fuel emissions and improving efficiencies.
“To put this into perspective, an offshore support or research vessel will typically burn some 3,000 tonnes of fuel annually and generate about 10,000 tonnes (equivalent) of greenhouse gases,” says James Cowles, L3Harris UK. “The environmental footprint of an independent ASV or AUV is, by comparison, negligible.”
“Combining all of these capabilities will bring about a step-change in AUV operations, providing a disruptive capability in the marine autonomy space,” says Matt Kingsland, NOC. “Indeed, reducing the cost and improving the navigation precision of autonomous ocean science in remote areas could bring a disruptive capability to a wide variety of applications.”
Underwater positioning and tracking technology from Sonardyne International Ltd. is to be used to support search and recovery operations undertaken by the Republic of Korea Navy’s (RoKN’s) new auxiliary submarine rescue ship (ASR-II).
Through a contract with GE’s Power Conversion business, the ASR-II will be fitted with Sonardyne’s Ranger 2 Ultra-Short BaseLine (USBL) system. This will interface onboard the vessel with GE’s class leading Seastream™ Dynamic Position (DP) control system providing accurate and fast position reference updates during critical station keeping activities.
The Ranger 2 onboard the ASR-II will also be used to simultaneously track the position of, and communicate with, Sonardyne instrumentation fitted to the new, untethered Deep Search Rescue Vehicle (DSRV) that is being built to operate from the ship when it comes into service.
Ranger 2 is installed on a global fleet of DP vessels operating within defence, offshore energy, ocean research and commercial survey. Its success in meeting the diverse operational requirements of these sectors is built around Sonardyne’s versatile 6G hardware and Wideband 2 signal technology platforms. This combination enables underwater targets to be tracked beyond 11 km, position updates to be acquired every second, and for a vessel to work in any water depth, shallow or deep.
The ASR-II and its moonpool-deployed DSRV are being built under South Korea’s Defense Acquisition Program Administration as a replacement for the submarine rescue ship RoKS Cheonghaejin. The 5,200-tonne ASR-II is expected to be delivered to the RoKN by the end of 2022.
Sonardyne’s order from GE’s Power Conversion business includes everything the ASR-II will need to achieve the best performance from its Ranger 2 USBL during exercises or in the event of a submarine rescue operation. This includes a seabed-deployed 3,000 m-rated Dynamic Positioning Transponder 6 (DPT 6) with recovery floatation collar to provide high accuracy USBL positioning for reliable station keeping, even when operating near sources of potential noise interference such as other naval vessels.
The control room software will be fitted with a Ranger 2 Marine Robotics Pack, which unlocks an additional range of features to enable the vessel crew to both track the DSRV and also communicate with it by sending and receiving status messages.
Finally, Sonardyne will also supply a deployment machine and gate valve, through which the Ranger 2 HPT 5000 USBL transceiver will be deployed through the hull of the ASR-II. The HPT 5000 enables underwater targets to be tracked over a wide range of water depths and elevations so is perfect for vessels needing to undertake different tasks on a regular basis.
[blockquote author=” Derek Lynch, Global Business Manager for Marine Vessel Systems at Sonardyne”]”We have a track record in reliably positioning underwater systems in the deepest waters, as well as shallow water, and for something as critical as a submarine rescue system, you need a system that has proven ability in all situations. Ranger 2 has that. The configuration of equipment we’re supplying to the ASR-II means it will have everything it needs to arrive on site and begin working immediately to support search, rescue and recovery operations anywhere in the world.”[/blockquote]
By Duncan Rigg
Transceiver deployment systems are key to ensuring your Ultra-Short BaseLine (USBL) system or sonar system performs at its best.
I looked at selecting the right deployment system for you in my last blog. But, once you’ve installed your system, there are a number of basic checks that you can do to help preserve its integrity and make sure that it still supports your sensor in the way it should.
We’ve created an easy step-by-step guide for you, outlined below. You can of course also call us if you would like any further support.
Step 1 – check for contamination  Contamination on the pole or inside the sea chest on a through-hull deployed pole will likely affect the installed sensor. For example, if the vessel transits through surface oil, there will likely be a residue left on the pole or inside the sea chest. During recovery this residue may coat the sensor.
Contamination on the pole or inside the sea chest on a through-hull deployed pole will likely affect the installed sensor. For example, if the vessel transits through surface oil, there will likely be a residue left on the pole or inside the sea chest. During recovery this residue may coat the sensor.
This can affect an acoustic device’s ability to determine range and bearing. This can be made even worse if the sensor is coated in soft marine growth, which acts like a sponge and absorbs the oil. It is therefore very important to check the pole on a regular basis and check for signs of contamination.
On the through-hull deployment machine, this can be done simply by flushing the sea chest with seawater. Just drain the sea chest and then open the gate valve. For the over-the-side pole, a quick inspection of the pole and sensor once recovered is usually sufficient to see if there is a residue present.
The through-tube pole will be more difficult to determine, but, with its modular construction, it can be easily removed from the tube so the sensor can be inspected.
Step 2 – check your bracing Sonardyne’s deployment systems are designed to work in harsh environments and have been built to withstand through-current speeds of up to 10 kts. The force generated on the pole whilst deployed is significant and if not correctly braced there is a potential of not only damaging the pole but also the vessel structure.
Sonardyne’s deployment systems are designed to work in harsh environments and have been built to withstand through-current speeds of up to 10 kts. The force generated on the pole whilst deployed is significant and if not correctly braced there is a potential of not only damaging the pole but also the vessel structure.
One of the results of an inappropriately braced machine is excessive vibration. This can affect sensor performance and reduce the working life of the deployment pole.
Inspecting the bracing on a regular basis and ensuring the required number of bracing points are used is critical to ensuring longevity and performance. By simply adding a witness mark to all nuts it is possible to visually tell if the tension in the bracing has changed.
Step 3 – check for corrosion All poles are designed to withstand the effects of being submersed for long periods of time. However, if the coating on the pole is damaged, corrosion can begin to set in.
All poles are designed to withstand the effects of being submersed for long periods of time. However, if the coating on the pole is damaged, corrosion can begin to set in.
Regular inspection of the entire pole should pick up areas of corrosion. We can provide details on how to temporarily repair our various deployment poles, but, if the corrosion is excessive, the only safe solution is to replace the pole.
Step 4 – keep it sealed On through-hull deployment poles, the pole surface condition is crucial to ensuring a water-tight seal is maintained. Any blemishes to the pole coating will damage the pole’s seals and scrapers every time the pole is deployed or recovered.
On through-hull deployment poles, the pole surface condition is crucial to ensuring a water-tight seal is maintained. Any blemishes to the pole coating will damage the pole’s seals and scrapers every time the pole is deployed or recovered.
On through-hull deployment systems, the machine forms a water block once the gate valve is opened. It is therefore crucial that all seals are well maintained and replaced as and when needed.
We recommend that all seals are replaced at least every 5 years, but, depending on where the vessel is operating, this may need to be more frequently. Typically, water ingress occurs where the pole passes through the sealing section. Although reaching these seals whilst afloat is possible, it is always a good idea to replace them when in dry dock. If these seals are being damaged regularly, it is also a sign that the pole itself is damaged.
Step 5 – remove marine growth Marine life not only affects the performance of the acoustic sensor, but it can also damage the pole structure, especially gate valves.
Marine life not only affects the performance of the acoustic sensor, but it can also damage the pole structure, especially gate valves.
Marine growth should be cleaned off when possible. On sealed systems, such as the through-hull deployment pole, where access is not always possible at the frequency required, simply operating the gate valve and the machine will remove any build-up of marine growth and ensure the gate valve and pole remain marine growth free.
Step 6 – staff training Once installed, deployment poles should be simple to operate. But, it is still a good idea to ensure that everybody who works in and around them is familiar with how they operate. All our deployment poles use hydraulics, so only trained personnel should be operating and servicing them.
Once installed, deployment poles should be simple to operate. But, it is still a good idea to ensure that everybody who works in and around them is familiar with how they operate. All our deployment poles use hydraulics, so only trained personnel should be operating and servicing them.
In addition, the through-hull deployment machine also uses high voltages to drive the hydraulic pump. Due to its design, the through-hull deployment pole can be operated remotely, so a full understanding of how the system works and a safe working practice must be implemented by the vessel to ensure those operating and working on the machine do so safely.
The through-hull deployment pole has a manual override function that the crew should familiarise themselves with in case of a power-out or for emergency operation.
We can provide training on operation and maintenance for all deployment poles and we recommend that any training is given on the vessel the machine is installed on.
We also offer site survey services, to ensure the installation and integration of your pole is done efficiently and so that your system will work at its best.
If you’d like to know more about our deployment machines options or to discuss a particular project, please get in touch.
By Andy Marsh, Technical Consultant, Sonardyne
Harbour porpoise are rather elusive creatures. They’re one of six species of porpoise and one of the smallest marine mammals. But, while they’re abundant in British coastal waters, including around river estuaries and even up rivers, their behaviours and social patterns aren’t very well known.

In some areas, their presence is not so well documented. It had been thought that they were rarely present, if at all, in the eastern English Channel. Indeed, sightings of live porpoise in Dorset, for example, are rare – at just a couple a year – with about twice as many reported dead strandings.
Because they tend to be quite shy and good at keeping a low profile, harbour porpoise are notoriously hard to spot. So, it’s been hard to really know if they are there or not. So, Dorset Wildlife Trust decided to take a different approach to looking for them – one that wasn’t based on visual sights. This meant using an acoustic equivalent of a camera trap – a C-POD, loaned by Chelonia Ltd.
These types of instruments can sit on the seabed for months at a time, recording the click sounds the harbour porpoise make. Recovering them, to access the data they’ve recorded, is then made easy – and wireless – using one of our acoustic release transponders.
Release transponders mean instruments can be moored where they’re required and then the instrument released wirelessly, using an acoustic signal from a remote transducer deployed from a vessel. Once it pops up to the surface, it can be easily collected. With a rope canister option, the entire mooring or instrument base can also be hauled up out of the water.
For this project, I arranged the loan and deployment of one of our Type 7986 Lightweight Release Transponders – LRT – (now RT 6-1000) with a rope canister. These LRTs work in up to 500 m water depth, making them great for use in continental shelf waters. Depending on the battery type chosen (alkaline or lithium), it can stay submerged, ready to be released, for up to 18 months or up to four years.
In Dorset, the LRT ( RT 6-1000) with a C-POD was deployed just off Anvil Point lighthouse last year. Dorset Wildlife Trust then went out in February this year to collect the instrument, by triggering the LRT from a 7967 Surface Command Unit from the San Gin II, a locally hired vessel.

The results showed that this type of marine mammal monitoring was worthwhile. During the deployment period, observers watching the sea surface only saw one harbour porpoise. In comparison, analysis of the C-POD data indicated harbour porpoise encounters on 11 out of the 83 days that it was out there listening.
“Even this is likely to be an underestimate as the C-POD was swamped by sediment noise during the periods the tide was running strongly (about 70% of the time),” says Dorset Wildlife Trust’s Marine Policy and Evidence Manager Peter Tinsley.
It’s a great way to learn more about coastal marine life,” he says. “The data gathered is likely to help improve the understanding of who is using the seas around Dorset’s coastline. The impact of that is more than just fulfilling curiosity. It will help organisations like Dorset Wildlife Trust to demonstrate how we can better manage human activities in those areas,” says Tinsley.
“As the seas have become busier, they have become much noisier – perhaps it’s time to identify some quiet refuges, akin to ‘dark sky sites’ for light pollution,” he suggests. “It’s also just good to know these shy hunters are out there.”
Find out more about Dorset Wildlife Trust here: www.dorsetwildlifetrust.org.uk
Porpoise Photo credits:
Header image: Marcus Wernicke (Tuugaalik), Porpoise.org Porpoise Conservation Society (www.porpoise.org) [CC BY-SA 4.0] (https://creativecommons.org/licenses/by-sa/4.0)]
Body image: Erik Christensen [CC BY-SA 3.0] (https://creativecommons.org/licenses/by-sa/3.0)]