If you have been reading these blogs you’ll know by now that Autonomous Underwater Vehicles (AUVs) have come of age.
They are able to gather hydrographic and oceanographic data at unmatched resolution with great stability and can be programmed to do so at the sweet spot for the sensors that they carry. For the most part, commercially available AUVs are programmed to follow a set route of waypoints and tasks. There’s no reasoning, they simply follow the plan. There’s no adapting of a mission’s goals to accommodate changes to plans. And when working with multiple AUVs, each one is operated independently and kept at arm’s length of others to keep them from interfering with each other. But, all the talk today is of AUVs working in collaboration as a swarm and working together as interconnected subsea networks. These new concepts of operation raise new questions. Let’s look at this in more detail.
What are the challenges?
Navies are interested in deploying AUV swarms to help survey, classify and map the littoral with high accuracy and at a fast tempo. These AUVs will sense the environment and then they will optimise their mission by processing the data from their on-board sensors. How many AUVs will be in the swarm? Will they be organised in squads? Will we be able to operate all the AUVs from a single command and control station? How will they interact with the operator?
In the Ocean Science community and the Oil and Gas industry, the talk is of interconnected subsea networks where instruments gather data over prolonged periods of time and AUVs are used to harvest the data and help with network maintenance tasks. The AUVs will be deployed for long periods of time, or even permanently, and will need to travel over the whole network autonomously without human control. Will the AUVs be able to navigate without external aids? Will they be able to gather the data and share it with a central node? Will they operate from a subsea garage? Will they work with other AUVs?
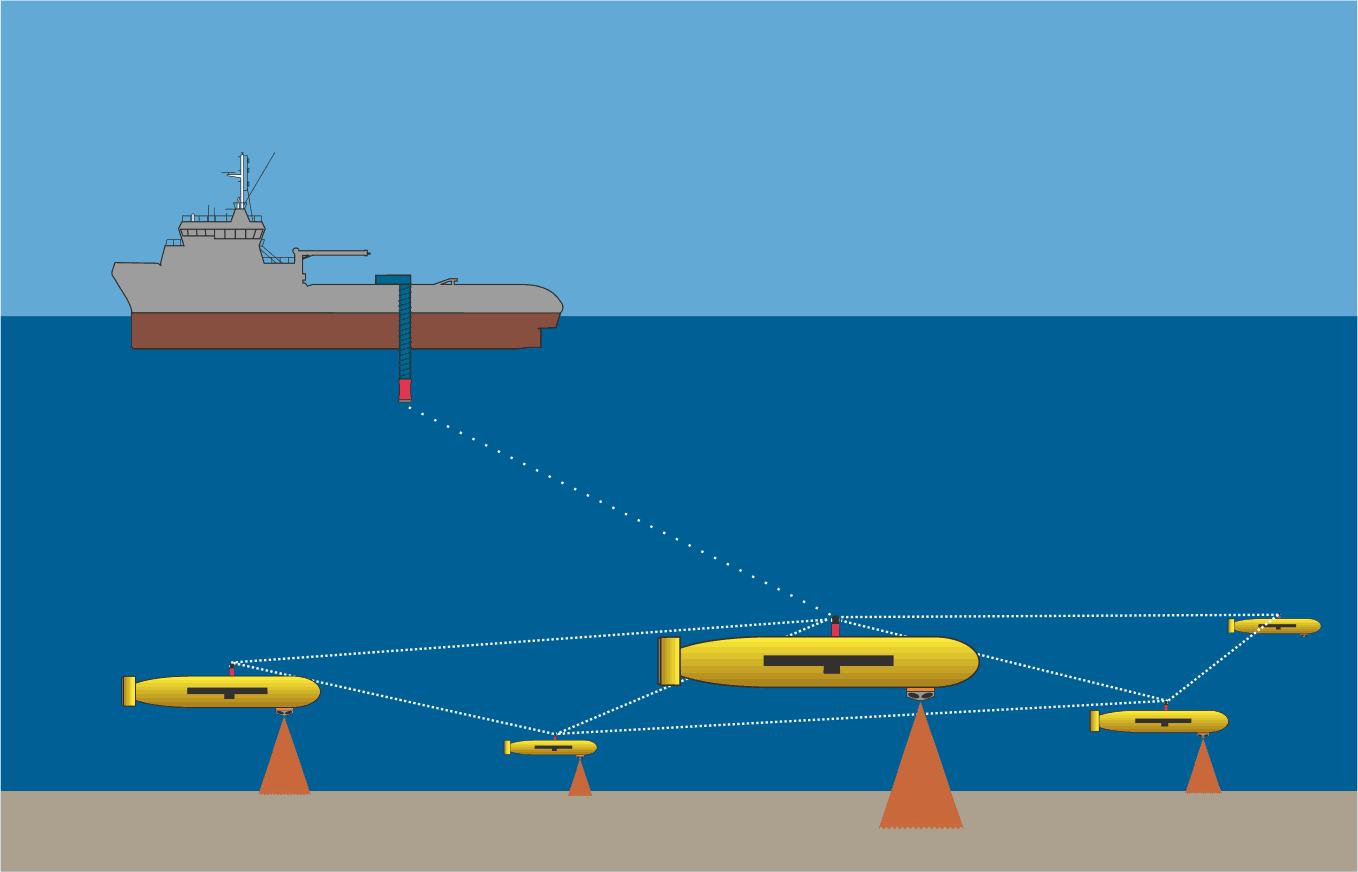
Subsea there’s no network of satellites to work with. Instead AUVs need to position and communicate using other means. Ultra-Short Baseline (USBL) acoustic systems, such as Ranger 2, are a good alternative to help localise the AUVs and have also been successfully deployed to communicate with AUVs equipped with transceivers, such as AvTrak 6. The AUV can be tracked from the surface and their navigation solution is operated from the surface using the same signal that is used to track it.
Too many systems = Congested acoustic operations
If each AUV requires a USBL system, we soon run out of effective frequencies from which to operate a swarm. Or we are required to use a single frequency band and limit access to each AUV to agreed time slots so that they don’t talk over each other. This is what is happening now, the community is using Time Division Multiple Access (TDMA) to provide each AUV with a time slot in which it can communicate. Some published results showed that in a fleet of eight AUVs, each AUV only had a window every 6 minutes in which to communicate. A very ineffective use of the bandwidth which doesn’t scale!
Enter 6G acoustics – One system, multiple tasks
“When we designed our 6G acoustic framework we had two words in mind: Scalable and Robust. In a congested space it’s easy to run out of bandwidth in which to communicate and our customers who often have to operate networks of transponders in the seabed could not afford to waste time while there’s real work to be done. We therefore introduced a flexible protocol of commands to enable flexible communications”, Darryl Newborough, Technical Director at Sonardyne, gave me some insights as to how it all started. “Our Wideband 2 signals enable us to incorporate data with every update – and the user can control just how much data they want to send. So the same USBL system that is used to track the AUVs can also tell them where they are. No need for additional modems.”
The ability to send data with each update is very powerful, now we can share mission plans with AUVs, alter their goals and so much more. The AUVs in turn can provide status updates and even send information to the user. The protocols are really effective, easy to use and completely applicable to AUV swarms. Here’s the list:
Discovery: All transceivers in range will let you know that they are there, their address and how far away they are.
Single Interrogate: A transceiver can interrogate any other transceiver exclusively. Carry out an individual USBL fix or share data effectively with a single asset. Without disturbing others… this includes AUV to AUV
Common Interrogate: A transceiver can interrogate all the other transceivers. In doing so it can share information with all of them, meaning that the USBL on the surface can let all the AUVs know where they are. Each AUV in turn could then provide an update of its individual location to the surface.
Modem: If at any point the data transfer required exceeds simple update messages, the transceivers can establish a modem connection and transfer large volumes of data peer to peer.
Choose your Group: Transceivers can be organised into groups such that Group A receives the information pertinent to that group and Group B receives that which is relevant to it. They can also switch to another group on stride, meaning the AUVs can find the right group to have a private conversation J
Using 6G, navies can organise AUV swarms into increasing number of squads. Squads can communicate with other squads, and operators can each take control of a squad or direct the whole swarm of AUVs!
And ocean scientists can mobilise AUVs permanently as part of an ocean observatory, enabling the AUVs to use the ocean observatory as a position reference and to exchange information with shore via a remotely connected node.
In oil and gas, the AUV will explore the subsea field and navigate relative to acoustic 6G nodes in the infrastructure and exchange data at the same time. Should they run into another AUV, they will be able to exchange notes!
Future ready
Whether you are looking to coordinate a swarm of autonomous seismic nodes, persistent monitoring gliders, military AUV squads or life resident AUVs, the powerful 6G architecture is ready to support your development. We offer awesome developer courses and can help you with your design. Get in touch and let’s make your AUV swarm happen!
Author: Ioseba Tena – Global Business Manager – Marine Robotic Systems