Accurately positioning objects underwater has always been one of the greatest challenges in marine operations. Whether it’s tracking a remotely operated vehicle (ROV) thousands of meters below the surface or installing critical subsea infrastructure, knowing exactly where things are is essential.
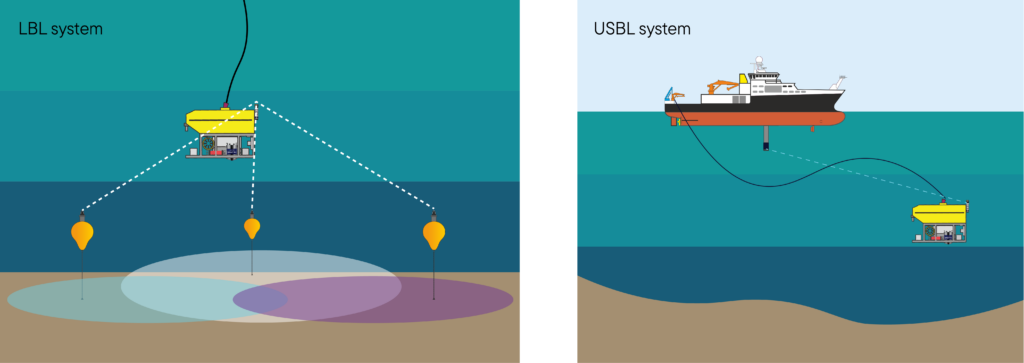
For decades, this capability relied on two primary acoustic positioning techniques: Long BaseLine (LBL) and Ultra-Short Baseline (USBL). While LBL offered exceptional accuracy independent of water depth, it demanded dense, time-consuming arrays of seabed transponders.
USBL provided speed and flexibility but faced accuracy limitations in deep water and challenging acoustic conditions. This operational gap created the ideal environment for a hybrid approach to emerge—Sparse LBL (which our surveyors would be happier calling range aiding).
It’s an approach that Sonardyne played the leading role in developing, making it the firmly established practice it is today. In this article, we explore the history of range aiding (Sparse LBL), tracing its emergence from a conceptual to a commercial solution by the early 2010s, into an industry standard and further advances like SLAM calibration.
We will look at the technological enablers that made it possible and consider its impact on efficiency, integrity and cost-effectiveness in modern offshore operations.