Ocean science technology company, Sonardyne International Ltd, UK., announced today it has been awarded the contract to supply Britain’s new polar research vessel, RRS Sir David Attenborough, with subsea acoustic tracking and position reference equipment.
The Ranger 2 Ultra-Short BaseLine (USBL) system will be used by scientists to precisely track the position of, and communicate with, scientific instruments and robotic vehicles deployed from the vessel, including the now famous Boaty McBoatface AUV. Ranger 2 will also be interfaced with the vessel’s dynamic positioning (DP) system for precise station keeping during science operations.
Commissioned by British Antarctic Survey, an institute of the Natural Environment Research Council (NERC), and being built by Cammell Laird in Birkenhead to a Rolls Royce design, the RRS David Attenborough will be one of the most advanced vessels of its type when it enters service in 2019. Measuring 128 metres long and 24 metres wide, the new ship will have a range of 19,000 nautical miles and be able to accommodate up to 60 scientists engaged in ocean, seafloor and atmospheric research.
Sonardyne’s Ranger 2 will support the RRS Sir David Attenborough’s pioneering work by enabling science teams to precisely monitor the position of underwater systems deployed from the vessel. Sonardyne’s exclusive wideband acoustic signal technology and 6G (sixth generation) hardware platform allows autonomous and remotely-operated vehicles, towed platforms and seafloor landers to be simultaneously and precisely tracked to ranges beyond seven kilometres.
Alongside design and engineering services, Rolls Royce is supplying a comprehensive package of control systems and equipment for the vessel, including the DP system. This will utilise data from Ranger 2 to maintain a stable vessel position as equipment and vehicles are deployed and recovered in some of the most challenging marine environments on the planet.
Sonardyne’s contract includes the supply of two through-hull deployment machines, seafloor and vehicle-mounted tracking transponders, and topside control hardware and software. The first equipment deliveries to Cammell Laird for integration into the vessel have already begun.
The commissioning of the RRS Sir David Attenborough represents the UK Government‘s largest investment in polar science since the 1980s. When the ship comes into service, all three Royal Research Ships, James Cook, Discovery and now Sir David Attenborough, will be equipped with Sonardyne underwater positioning technology.
[blockquote author=” Mark Carter, Global Business Manager for Sonardyne”]”As a privately-owned British engineering company, it’s a great honour for our technology to have been selected for Britain’s next polar research vessel. The work now begins to deliver Ranger 2 and support Rolls Royce, Cammell Laird and British Antarctic Survey through the installation and commissioning phases of the project.”[/blockquote]
For more information on Ranger 2, click here.
Maritime security company, Sonardyne International Ltd, UK, has announced that its underwater intruder detection sonar technology, Sentinel, has been installed on the site of a new Critical National Infrastructure (CNI) facility in the Middle East to monitor unauthorised access from the sea. The programme of work included the supply of multiple in-water sonars and redundant control room equipment in order to provide uninterrupted situational awareness over a large waterfront.
CNI facilities such as power plants, dams, gas storage terminals and offshore oil platforms represent attractive targets for sabotage. Many of these installations have comprehensive above-the-water security systems that can include physical barriers, access control, surface radar and long range opto-electrical sensors. However, many are vulnerable to intrusion from the water, and in particular, from below the surface.
Sonardyne’s Sentinel closes this gap in surveillance capability. It reliably detects, tracks and classifies divers and small underwater vehicles approaching a protected asset, alerting security personnel to the potential threat. With a track record spanning more than 10 years, Sentinel is widely regarded as the security industry’s most extensively deployed diver detection sonar.
The small, lightweight design of Sentinel’s in-water sonar unit makes it ideal for mobile security operations but for this contract, Sonardyne’s in-country partner installed the sonars on permanent seabed mounts placed in key locations around the shoreline.
Each sonar is designed to provide 360 degrees of coverage and provides long range warning of incoming targets for the local security personnel to intercept the threat. It is even able to determine, with a high degree of probability, what type of diving equipment they are wearing; open or closed circuit.
Due to the strategic importance of the new facility within the region, for the first time Sonardyne was requested to supply dual redundant control-room equipment to ensure uninterrupted service. All equipment was interfaced with the facility’s third party C2 (Command and Control) security system.
[blockquote author=” Paul Rosewarne, Maritime Security for Sonardyne in the Middle East”]”Our announcement today marks the end of many months of planning and on-site activities with our local technical partners and end client to deliver, install and commission Sentinel at this important new facility. We’re confident that our diver detection technology will provide the same peace of mind as the many other Sentinel systems that are in service across the region.”[/blockquote]
For more information on Sentinel, please click here.
Author: Ioseba Tena – Global Business Manager – Marine Robotic Systems
Why do I need to use an AUV? Why are we putting so much effort into these systems? How are they adding value to our everyday operations? Those of us involved in the marine robotics industry face these questions every day, even though it’s been many years now since AUVs found commercial acceptance. Trust, as always, is in short supply. Yet we persevere, and the market for AUVs keeps growing. What drives this growth? While most of the players in the marine robotics industry have a passion for technology and the ocean, passion alone is not enough to sustain a business. Passion gets you started, but it can’t sustain you. So how do AUVs add value to operations? It’s all in the data!
Yes, the data. Even in the early days of AUV operations it was clear to see some of the key benefits that AUVs would bring to the table. They provided a very stable platform to fit payload sensors which could be used to measure the AUV’s environment. They could do that at a user defined distance from the seafloor and they could sample at a constant speed of travel in a chosen direction. This meant that surveyors and scientists now had a tool that they could send on a chosen path, and knew that the AUV would follow that route to the best of its ability. This lead to regular sampling, and higher precision. In other words, better data.
Side scan sonar data in particular was transformed by AUVs. The navies of the world caught on quick. Searching, classifying and mapping operations were transformed. They could deploy in challenging littoral waters and use acoustic beams to generate images either side of the AUV. These images helped operators make better decisions which in turn helped them save time and better manage risk. Initially the side-scan sonars were performance-limited as they needed to limit the power usage to accommodate the AUVs’ battery budgets. With time their performance improved. Boy, did it improve!
Improving the payload with Multi Aperture Sonar
Since the value of an AUV is intrinsically linked to the payload instruments it carries and the data it can capture, what’s the easiest way to add value to an AUV? Improve the payloads. That’s what the team at Sonardyne Wavefront were tasked with when they 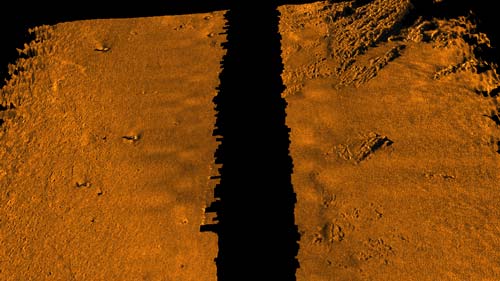 designed Solstice our Multi Aperture Sonar. We were asked the question “How can I get better data from a side-scan and more of it?” So we started to look at the variables, and how we could improve on what already exists. Essentially, the overarching objective was; if x value can be achieved from running a survey with a 100 metre swath side scan and an along-track resolution of 0.3°, doubling the range to 200 metres and halving the along-track resolution to 0.15° should be able to get 4x from the same AUV side scan.
designed Solstice our Multi Aperture Sonar. We were asked the question “How can I get better data from a side-scan and more of it?” So we started to look at the variables, and how we could improve on what already exists. Essentially, the overarching objective was; if x value can be achieved from running a survey with a 100 metre swath side scan and an along-track resolution of 0.3°, doubling the range to 200 metres and halving the along-track resolution to 0.15° should be able to get 4x from the same AUV side scan.
Rob Crook, Sonardyne Wavefront’s research director, recalls, “We had to use every trick in the book. Taking advantage of the unique qualities of AUVs, we started by re-designing the actual array used to generate the acoustic beams to limit multipath interference typical of shallow water deployments. We used unprecedented numbers of receive elements, 32 on each flank, to provide fully dynamically focused imagery over the whole length of the swath, with super high ‘classification’ resolution close in. Using Multiple Aperture Sonar Processing we enhanced the data by ensuring full un-distorted bottom coverage despite any non-linear platform motion and delivered improved signal to noise ratio into the bargain. We even developed a real-time technique to dynamically re-calibrate each individual hydrophone element several times a second to compensate for any dynamical strains. And we provide interferometric bathymetry – in other words we provide a 3D surface alongside the class-leading intensity picture”
Early results demonstrated that the effort had been worth it. Solstice is more than just a side scan sonar, at 0.15° it boasts incredible ultra-high, along-track resolution, matched by an incredible 200 metre swath. All of this is done while drawing no more than 18 Watts of power. This means that you can run it on a low-logistic AUV over an 8 hour mission and leave spare power to mount other instruments.
Better data = improved operations
 Navy users recognise the value of good side scan sonar data. More data means the AUV operation run more effectively, but better data benefits the whole operation. For example, it’s common to send a diver or a remotely operated vehicle (ROV) every time you need to confirm a possible identification in the side scan data, such as a mine. For every miss-identification it means increased deployments for the divers and ROVs. Any sailor would tell you straight away this is not a good idea. That’s why navy operators value the look of Solstice imagery. After all, an AUV’s intrinsic value is the data it gathers.
Navy users recognise the value of good side scan sonar data. More data means the AUV operation run more effectively, but better data benefits the whole operation. For example, it’s common to send a diver or a remotely operated vehicle (ROV) every time you need to confirm a possible identification in the side scan data, such as a mine. For every miss-identification it means increased deployments for the divers and ROVs. Any sailor would tell you straight away this is not a good idea. That’s why navy operators value the look of Solstice imagery. After all, an AUV’s intrinsic value is the data it gathers.
Since I joined Sonardyne, Solstice has been one of the stand-out products for me; I can’t believe the image quality. It builds on the strengths of AUVs and does so without impacting the power budget. The data is great to look at, as you can see from the images, but it’s also great for feeding into Automatic Target Recognition algorithms. If the data is why people buy AUVs (and I think we already established that’s why) then make sure you get the best data.
Please feel free to get in touch with me, or the rest of the team at Sonardyne, to learn more about the Solstice.
Maritime security company, Sonardyne International Ltd, UK, has reached the latest delivery milestone in a contract to supply a fleet of Offshore Patrol Vessels (OPVs) under construction in the Far East, with its diver detection sonar technology, Sentinel.
Two ship-fit Sentinels have now been tested and delivered with more to follow, as part of a wider contract to equip each OPV with a fully integrated force-protection capability. Working with MARSS Group’s NiDAR long range maritime surveillance system, the Sentinels will provide complete underwater domain awareness by detecting unauthorised divers and subsurface vehicles approaching the OPVs and the assets they protect.
Offshore patrol vessels are becoming an increasingly relied upon resource for navies and coast guards worldwide in the fight against piracy, drugs, terrorism and mine warfare. The OPV platform is advancing in its versatility thanks to new developments in shipbuilding technologies, allowing vessels to be configured for a number of different missions, using Commercial Off-The-Shelf (COTS) equipment, such as Sentinel.
The ability to reliably detect underwater intruders or vehicles in real-time at long range is essential to provide ample time for ship security officers to react to a security breach. Vital minutes can make the difference between successful threat interception and divers and vehicles being able to deliver their attack.
Sentinel detects, tracks and classifies underwater threats at up to 1,200 metres range to provide a rapidly deployable perimeter intrusion capability to help safeguard commercial harbours, naval vessels, private yachts, critical national infrastructure (CNI) and waterside residences.
For this contract, the Sentinel sonar heads will be deployed from the OPVs using bespoke through-hull technology developed by MARSS to occupy a minimal footprint within each hull. Controlled and monitored by Nidar, the sonars can be lowered automatically to establish an instant, 360 degree monitored zone around large naval ships at anchor, or the entry to a port or harbour.
Speaking about the contract, Ross Gooding, Business Development Manager for Maritime Security with Sonardyne said, “This has been an exciting project for us and our partners at MARSS to be involved with; reaching this latest milestone demonstrates our combined commitment to supply, install, commission and support this important new OPV fleet in the region for many years to come.”
[blockquote author=” Ross Gooding, Business Development Manager for Maritime Security”]”This has been an exciting project for us and our partners at MARSS to be involved with; reaching this latest milestone demonstrates our combined commitment to supply, install, commission and support this important new OPV fleet in the region for many years to come.”[/blockquote]
For more information on Sentinel please click here.
Author: Edmund Ceurstemont, USBL technical authority
We’re regularly asked “can you provide a tracking system capable of tracking beyond 7 km slant range” or “can you provide a system to track to full ocean depths”?
I have been working with underwater tracking systems for over 10 years now, and it’s not an easy task to replicate the deep ocean environment to test our Ultra Short BaseLine (USBL) systems to the limits of their performance where we are based in the UK.
Because of this, I decided to take it into the field, offshore, to test and demonstrate the capabilities of our LMF (Low-to-Medium Frequency) USBL technology and how it can be used to perform robust positioning at extended ranges.
Sonardyne’s LMF USBL system is based on existing MF technology, the only difference is the operating frequency.
If you were to take an LMF transceiver and an MF transceiver, side-by-side it would be hard to tell the difference.
Our LMF USBL systems looks a lot like our MF (Medium Frequency), in fact, if you put them side-by-side they are hard to tell apart. The clever detail that sets the equipment apart is in the design of the transmitter and transducers. That’s what enables us to push the kit to its limits to achieve longer tracking distances.
The objective
To push our USBL tracking system to see how far we can track underwater.
Planning
“Poor planning leads to poor performance”. And it’s no different when running offshore trials.
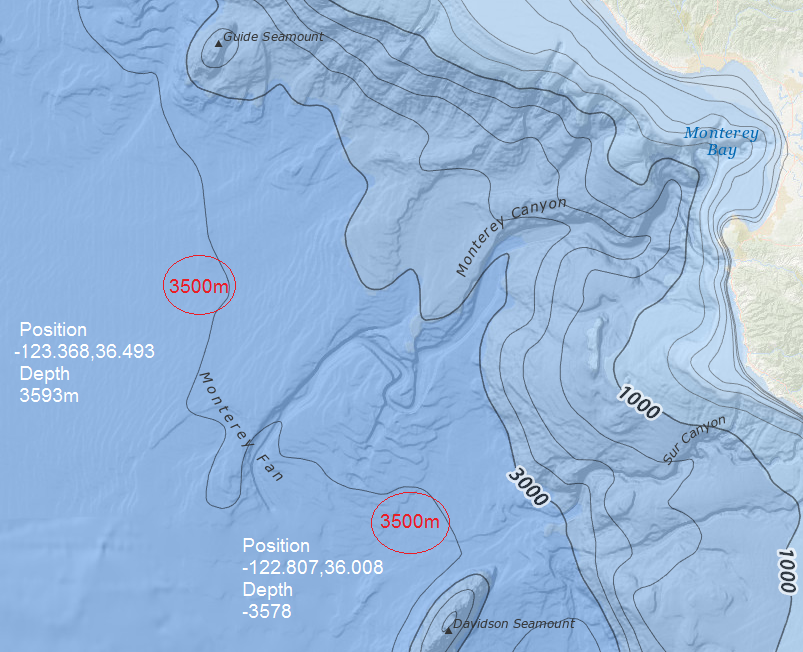 We had the fantastic opportunity to conduct the trials at the Monterey Bay Aquarium Research Institute (MBARI) based in California (it was a challenge, but I was willing to take one for the team!). MBARI was the ideal trials facility because of its accessibility to deep water and modern, high-spec research vessel, including two deployment poles for our use. This was the R/V Rachel Carson.
We had the fantastic opportunity to conduct the trials at the Monterey Bay Aquarium Research Institute (MBARI) based in California (it was a challenge, but I was willing to take one for the team!). MBARI was the ideal trials facility because of its accessibility to deep water and modern, high-spec research vessel, including two deployment poles for our use. This was the R/V Rachel Carson.
The deployment site chosen was 3,500 m deep and located about 130 km from the coast, beyond the Monterey Canyon.
One of the key targets was to test the system with a realistic set-up that a customer could buy off-the-shelf. There was no point in creating expensive, custom solutions when we are trying to solve a problem that a lot of our customers have. The system comprises an omni-directional LMF Compatt 6, which was deployed in a floatation collar, to be used as the target, and an LMF HPT transceiver. The LMF Compatt 6 provides the greatest operational flexibility when the geometry could be anything from vertical tracking to long lay back horizontal tracking. This put a restriction on the source level of the transponder, and had a knock-on effect of the overall range achievable; however, the setup would prove the versatility of the complete solution.
The system was modelled to predict the expected performance in terms of overall operational range, as well as precision and accuracy at these ranges. Based on signal losses alone, the predicted range of operation was 12,000 m slant range, however this was influenced by external factors such as the noise footprint of the vessel. The world ocean atlas aided the modelling, providing a reliable sound velocity profile for the trials site.
Deployment
After a seven-hour transit which mainly consisted of setup, catching up on sleep and the odd bit of whale watching (one of the perks of the job 😆 ) the LMF Compatt 6 transponder was deployed under ideal conditions.
The LMF Compatt 6 transponder free-fell to the seabed in about 30 minutes, during which the spiralling of the beacon through the water column could be visibly seen on Ranger 2 USBL tracking system.

After this, a Casius calibration was performed on the system to ensure offsets were correctly set and to verify the positioning performance directly overhead of the transponder.
The results showed a performance typical of MF, which is not that surprising as the LMF frequency of 15 kHz is only 5 kHz away from the bottom of our MF band.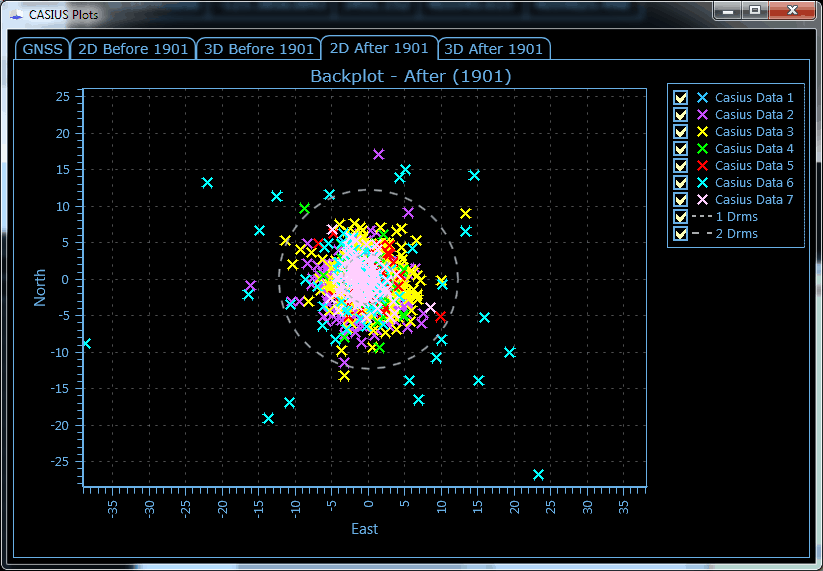
The Casius data showed the system operating with better than 0.12% slant range error (1DRMS).
After this verification, we could start work on what we came out to prove. How far can we track underwater?
The vessel headed out to the west for another 10 km whilst the LMF transponder was tracked and data gathered.
On a side note, and never one to miss an opportunity, during the run I wanted to test the high data rate telemetry (9000 bps), available within the HPT transceiver as standard, which uses our wideband and 6G technology. I was pleased to see that even at these longer operating ranges successful data transfer was achieved.
One difficulty of tracking at these ranges is the length of time needed for the signals to perform a return trip; at maximum range this was about 14 seconds. To overcome this difficulty, our Ranger 2 software which was used throughout the trial, was set to an update rate of three seconds which meant multiple ranging cycles were performed within one trip-time to give a true update rate of three seconds.
The system achieved robust tracking to a slant range of over 11,000 m, eventually limited by the source level of the transponder, transmitting 193 dB at 15 kHz.
![]()
I was impressed with the positioning performance of the system and the potential to track at extended ranges. The tests highlighted that an off-the-shelf product has a multitude of applications where extended range is needed, whilst maintaining excellent performance.
The trial ended with the successful release of the LMF Compatt 6 transponder, but with an error on my part! I calculated the up-thrust incorrectly. Due to extra weight attached to the transponder it meant a 1 ½ hour recovery rather than the 40 minutes predicted, much to the team’s annoyance!
Sonardyne and I would like to extend our thanks to the Monterey Bay Aquarium Research Institute for their support during the exercise which has helped verify real-world performance of a system able to track reliably in any ocean across the planet regardless of depth.
If you have any questions or would like to run through any of the trial in further detail, please get in touch, I would love to hear your thoughts.
Read the second installment of Ed’s blog here.
 Since 1993, we’ve worked with seabed-to-surface engineering, construction and services contractor, Subsea 7, supplying them with acoustic monitoring and positioning technology to support the tow-out and installation of prefabricated pipelines for the North Sea.
Since 1993, we’ve worked with seabed-to-surface engineering, construction and services contractor, Subsea 7, supplying them with acoustic monitoring and positioning technology to support the tow-out and installation of prefabricated pipelines for the North Sea.
The start of this year was no different and in the last few weeks, one 3.8 kilometre bundle for a field 300 kilometres north-east of Aberdeen and two 2.47 kilometre bundles for a UK based operator have been delivered. Pipeline bundles integrate all the components (valve work, pipeline and control systems) required to operate a field within one single steel carrier pipe. Incorporating everything within one structure offers substantial cost savings as offshore operations are minimised.
Each pipeline bundle is assembled at Subsea 7’s unique onshore fabrication facility at Wick, Scotland where rail tracks run from almost eight kilometres inland straight into the sea.
Once assembled, each bundle is pulled off the beach and transported to its offshore location suspended between two tow vessels. All stages of launch, tow and laydown on the seabed require continuous real-time monitoring of the bundle assembly to prevent unnecessary strain and stress being placed upon it.
Depth, heading, internal pressure and tow wire angle all need to be checked. To achieve this, specially configured Compatt 6 transponders are installed at regular intervals down the entire length of each bundle. Each one is fitted with a Data Highway Module (DHM) which interfaces with the bundle’s own internal data highway. This allows each Compatt to measure depth at its location and then communicate the data, via the data highway, to a designated ‘master’ Compatt mounted on the bundle.
 Heading data for each bundle is collected by three pipe-mounted subsea Lodestar AHRS units – each interfaced to a Compatt. Additionally, two pressure sensors provide carrier pressure at each end of the bundle and one sensor provides tow wire angle; all are interfaced to the bundle’s highway – again via the Compatts’ DHM.
Heading data for each bundle is collected by three pipe-mounted subsea Lodestar AHRS units – each interfaced to a Compatt. Additionally, two pressure sensors provide carrier pressure at each end of the bundle and one sensor provides tow wire angle; all are interfaced to the bundle’s highway – again via the Compatts’ DHM.
During a tow, the master Compatt 6 acoustically transmits data every 20-40 seconds to a towfish deployed from the survey vessel. Software developed by Subsea 7 provides the Tow Masters with a graphical representation of the bundle’s catenary, together with a histogram of its depth. This enables the actual in-flight profile and shape of the bundle to be regularly updated, and allows the Tow Masters to make operational adjustments during transportation to the field. It also ensures it ‘flys’ at the required depth to avoid submerged objects.
Upon arriving on-site, the bundle is correctly oriented using acoustics, before the bundle is vented to allow it to settle on the seabed.
Commenting on another successful season with Subsea 7, Nick Street, Senior Projects Manager at Sonardyne said, “We’ve now clocked up our 20th project using 6G; a great track record and one we hope keep building upon in the future.”

Subsea technology from Sonardyne that tracks the position of divers and remotely operated vehicles (ROVs) as they carry out surveys and inspections, has been selected by Vietnam-based Thien Nam Positioning JSC to supports its offshore activities in the region.
The Mini-Ranger 2 Ultra-Short BaseLine (USBL) acoustic tracking system, the first to be delivered into Vietnam, was supplied through Sonardyne’s subsidiary in Singapore. It has the capability to simultaneously and precisely track up to 10 underwater mobile targets and benefits from the same Wideband acoustic signal technology found in Sonardyne’s deep water USBL product family, but for significantly less cost.
Thien Nam Positioning conducts a wide range of geophysical surveys, pipeline and flowline installations, and maintenance operations in support of the country’s offshore oil and gas industry. Their divers and ROVs often work from vessels-of-opportunity, so survey equipment needs to be easy to install and easy to move from between vessels without affecting performance.
Speaking about the contract, Sonardyne Sales Manager, Daniel Tan explained that this type of operational scenario is perfect for Mini-Ranger 2. “For example, the transceiver used to communicate with the acoustic beacons fitted to divers and ROVs, is small and lightweight so can be mounted to a simple pole fitted to the side of a small survey vessel. At the same, it’s optimised to provide reliable tracking in shallow water, near the surface as well as in deeper waters. He added, “Onboard wiring is simple, whilst built-in diagnostic tools allow operators to monitor and tune system performance in difficult conditions.”
[blockquote author=” Vu Ba Dinh, Managing Director at Thien Nam Positioning”]”We’ve been a user of Sonardyne’s deep water system, Ranger 2 USBL, for some time now and been pleased with the results it’s delivered. Our decision to invest in Mini-Ranger 2 was made only after a detailed comparison of competing USBL technologies. This concluded that it’s attractive price and features will meet all of our needs.”[/blockquote]
For more information about Mini-Ranger 2, click here.
In 2007, a unique chapter in Sonardyne’s history began to be written – a chapter that would span the next 10 years and lead to the development of a completely autonomous and long endurance seafloor monitoring capability.
Shaun Dunn, Global Business Manager, and Tom Bennetts, Project Manager at Sonardyne look back at a unique subsea engineering challenge, how it was overcome and supporting a reservoir surveillance campaign that saw over 600 million measurements collected.
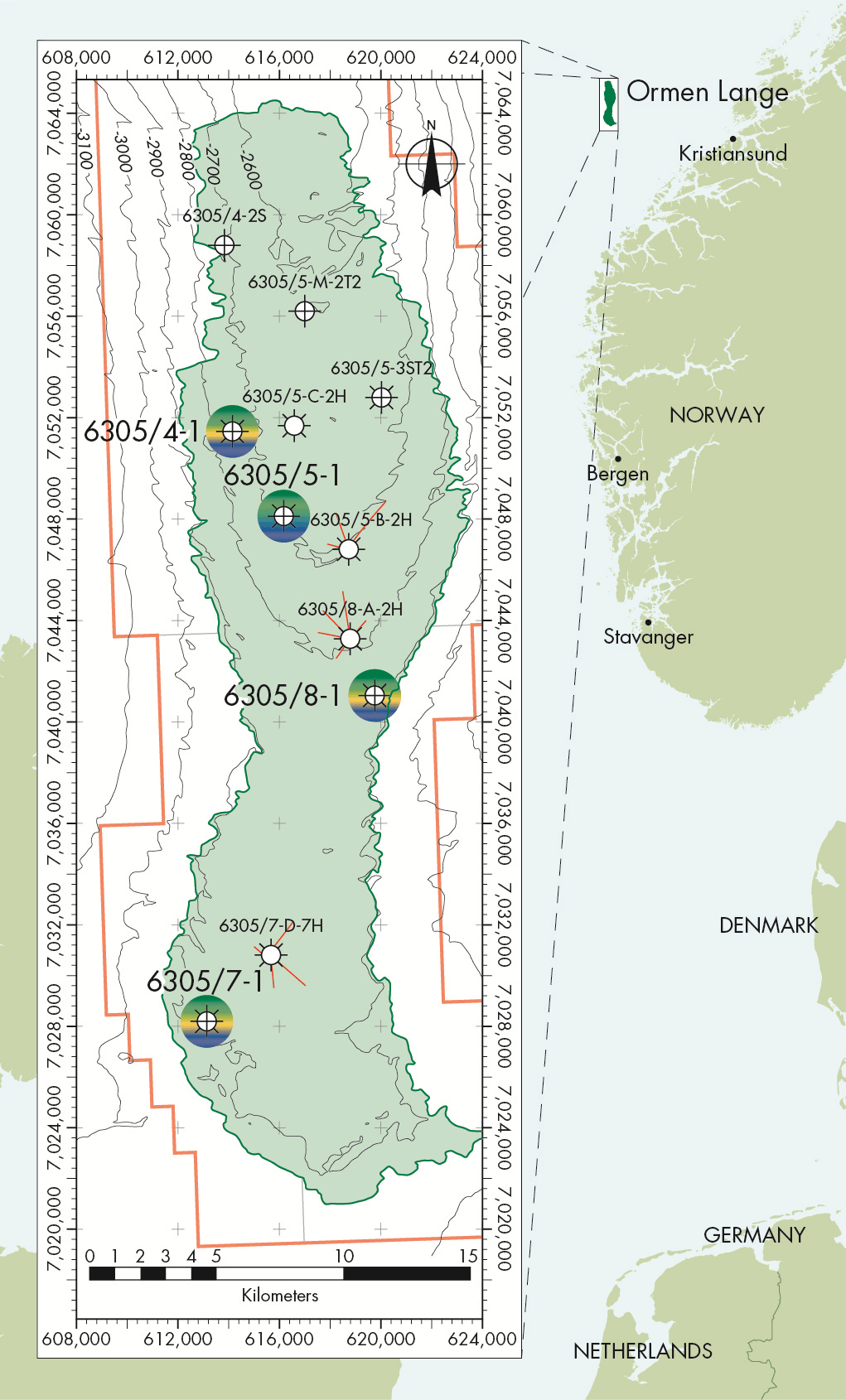 It began with a challenge set by Shell geophysicists, Stephen Bourne and Paul Hatchell. They were looking for a method of precisely measuring potential movement of the seabed caused by reservoir depletion in the newly commissioned Ormen Lange deep water gas field, located hundreds of metres beneath the surface off the coast of Norway.
It began with a challenge set by Shell geophysicists, Stephen Bourne and Paul Hatchell. They were looking for a method of precisely measuring potential movement of the seabed caused by reservoir depletion in the newly commissioned Ormen Lange deep water gas field, located hundreds of metres beneath the surface off the coast of Norway.
Subsidence measurement on land is comparatively easy because satellite positioning systems such as GPS provide highly accurate and repeatable measurements over long timescales. In the ocean it’s much harder, since electromagnetic waves are attenuated by salt water so GPS and optical survey techniques are not possible.
Therefore, a totally new solution was required and as we reported at the time in Baseline Issue 5, Stephen and Paul set us a very demanding brief. They were looking for subsea technology that could be deployed for many years without intervention, make hundreds of millions of stable highly precise measurements from a number of sensors, safely log the data and on command, wirelessly transmit the data to the surface.
Understanding the problem
Extracting hydrocarbons from a reservoir lowers the pore-pressure of the formation that contains the oil or gas, weakening it to a point where it might not be able to adequately support the rock layers above it. In earth sciences, this layer is known as ‘the overburden’. If measured accurately enough, the small, but detectable, changes to the surface of the overburden can be used by geophysicists to provide valuable insight into the rate of subsidence and other dynamic properties of the reservoir.
 Because deformation manifests itself as both vertical and horizontal seabed displacements, it quickly became apparent that these movements could be measured using a network of our acoustic transponders acting as ‘seabed monuments’ placed both within and outside of the expected subsidence region.
Because deformation manifests itself as both vertical and horizontal seabed displacements, it quickly became apparent that these movements could be measured using a network of our acoustic transponders acting as ‘seabed monuments’ placed both within and outside of the expected subsidence region.
Acoustic signals can be used for the purpose of measuring horizontal displacement by transmitting signals between pairs of transponders separated by several hundred metres and then accurately measuring the two-way round trip time. Since we can also measure the acoustic wave speed using sound velocity (SV) sensors built into each transponder, we can convert time and speed into distance and therefore continuously monitor for changes to the separation, known as strain rate, between many pairs of transponders.
Vertical displacement can be measured using integral pressure sensors and the results from multiple transponders can be compared and therefore the effects of tide, water column density and barometric pressure changes which are largely common to all instruments over long timescales can be removed from the data, leaving only the seabed depth changes remaining.
Precise ranging, acquisition of sensor data and telemetry is a common element of many subsea applications, so much of the engineering effort for the Ormen Lange project focussed on delivering the required endurance – which at that time was much longer than users typically required – and transponders that were capable of running a fully automatic data gathering and logging regime without intervention.
These requirements were met with the development of the Autonomous Monitoring Transponder (AMT) – a 3,000 metre depth rated instrument fitted with a range of sensors, wireless communications and a five year battery life.
Trial deployment
Keen to witness its capabilities, includingranging precision and long term pressure sensor performance, a small scale field trial of 10 AMTs was commissioned at Ormen Lange later that year. The AMTs were mounted in three metre tall tripod frames mand deployed to the seabed by ROV.
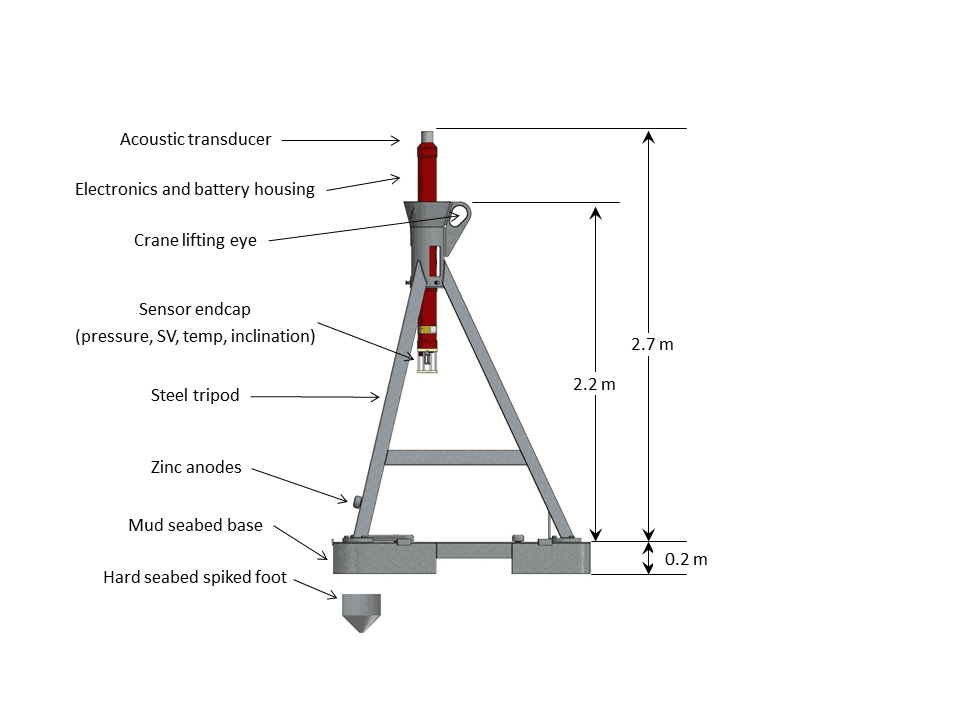 Conscious that any horizontal movement could affect the quality of the results, the AMT tripod was designed to be ‘heavy’ with the option of spiked feet for mounting on rocky terrain or a ‘mud skirt’ to reduce settlement into a soft seabed.
Conscious that any horizontal movement could affect the quality of the results, the AMT tripod was designed to be ‘heavy’ with the option of spiked feet for mounting on rocky terrain or a ‘mud skirt’ to reduce settlement into a soft seabed.
An initial 250 days of acoustic traveltime, pressure, sound velocity, temperature and inclination data was wirelessly recovered to the surface and handed to Shell for processing. Analysis of around 500,000 travel time, 60,000 sound velocity and around 10,000 pressure measurements demonstrated a range repeatability of around 5mm/km and drift in depth data in the order of 20mm/year. Results from this trial deployment were considered to be sufficiently encouraging to justify a longerterm field-wide subsidence monitoring campaign at Ormen Lange.
Full scale deployment
As the northern field was both the least developed area in 2010, and was also perceived to have the highest risk of deformation, it was decided to focus a field-wide network in this area such that the data would have the highest potential business impact to Shell and its asset partners. A narrow strip of sensors was also added to provide insight into the reservoir connectivity, pressure baffles and compartmentalisation over the saddle area between the southern and northern part of the field.
 The next task was to perform a terrain assessment across the region to identify suitable deployment locations for each AMT that would avoid line of sight obstructions and therefore ensure successful range measurement. This work was carried out by our Survey Support Group and their resulting deployment plan proposed 138 AMT units for the main northern subsidence region, 34 units for the trussed stripe going from north to south, and four stationary controls placed well outside the main array.
The next task was to perform a terrain assessment across the region to identify suitable deployment locations for each AMT that would avoid line of sight obstructions and therefore ensure successful range measurement. This work was carried out by our Survey Support Group and their resulting deployment plan proposed 138 AMT units for the main northern subsidence region, 34 units for the trussed stripe going from north to south, and four stationary controls placed well outside the main array.
Having determined the AMT array plan, all the instruments were manufactured and deployed within the very short Norwegian summer weather window. Using a vessel-ofopportunity, each AMT was lowered by crane to the seabed and moved into its final position using an ROV.
Data harvesting and recovery
The Ormen Lange AMT array was programmed to gather range, pressure, SV and temperature and tilt data at threehourly intervals. Each AMT wakes up and acoustically interrogates several neighbouring AMTs in order to precisely measure the distance between each unit.
These ranges, along with the environmental readings from the on-board sensors, were then stored to the AMT’s memory. The time-stamped data logged within each AMT was available for recovery at the surface via the integrated high-speed acoustic telemetry modem. On eight separate occasions, a vessel-of-opportunity was tasked with visiting the site and recovering data from where it was immediately sent to Shell whilst the vessel continued to move around the site.
In June 2016, after five and a half years of continuous operation, a final visit to the Ormen Lange AMT array was made – this time to recover all the transponders and bring the project to an end. This involved using an ROV to attach a crane hook to each AMT tripod from where they could be lifted from the seabed and on to the vessel.
Survey findings and looking ahead
The acoustic network data has been analysed in great detail by Shell geophysicists and used to obtain average deformation values over the period from October 2010 to May 2016. The data indicates the network is contracting at a maximum rate of around 10ppm/year in the centre of the field – equating to around 1cm of contraction per kilometre of seabed per year.
 The pressure data has been used to obtain subsidence estimates averaged over a period of one year. Individual AMT stations subside by up to 3.5cm/ year although there is some uncertainty in this result since drifts in the older generation pressure sensors used and residual noise on this data was observed to be quite close in magnitude to the measured subsidence signal.
The pressure data has been used to obtain subsidence estimates averaged over a period of one year. Individual AMT stations subside by up to 3.5cm/ year although there is some uncertainty in this result since drifts in the older generation pressure sensors used and residual noise on this data was observed to be quite close in magnitude to the measured subsidence signal.
When comparing the seafloor deformation data, a consistent picture of low subsidence rates was found to be in agreement with modelled predictions for Ormen Lange. The measured strain and subsidence rates of 5ppm/year and 2cm/year on average, were close to the sensitivity limits of this generation of equipment, but several promising improvements have been made to the sensors used and the AMT design since it was first developed in 2007, and it is expected to reach an overall sensitivity to horizontal strain and vertical subsidence of better than 5ppm/year and 1cm/ year in future deployments.
Norwegian survey company, Electromagnetic Geoservices ASA (EMGS) has increased its investment in technology developed by Sonardyne International Ltd, UK, which allows hydrocarbon sensing equipment to be positioned in deep water with extremely high accuracy.
The Ranger 2 Gyro-iUSBL system combines acoustic positioning and inertial navigation technologies and is the second system now owned by EMGS. It will be fitted to one of their towed electromagnetic sources which operate in water depths down to 4,000 metres, in conjunction with electromagnetic receivers, to detect the presence of hydrocarbons through more than three kilometres of rock. The purchase was announced on the opening day of the EAGE annual conference in Paris which both companies are attending.
EMGS are specialists in Controlled-Source Electromagnetic Surveying (CSEM), a method that involves towing a long horizontal dipole antenna behind a towfish flying at between 30-50 metres above the seafloor and transmitting a specific pre-defined EM waveform. EM receivers deployed on the seabed measure any energy that has been reflected by fluids, such as hydrocarbons, present in the reservoir as well as from the surrounding geological strata. This information can be used to produce reservoir maps for hydrocarbon exploration.
Precise subsea positioning of the source towfish, antenna and each seafloor receiver is critical to the success of CSEM. It leads to more accurate mapping of deeper reservoirs, and helps to reduce the risk of drilling dry wells.
Sonardyne’s Inverted Ultra-Short BaseLine (iUSBL) positioning technique addresses these complex operational requirements. It uses an acoustic transceiver called Gyro-iUSBL fitted on the towed source pointing backwards to continuously measure the positions of small acoustic transponders attached along the length of the dipole antenna. From this information, the precise shape of the antenna can be determined as it moves through the water.
Gyro-iUSBL combines in a single, deep rated subsea housing, the features of Sonardyne’s sixth generation HPT acoustic transceiver technology with SPRINT, a subsea inertial navigation sensor that can result in more than six times improvement in positioning precision over USBL alone.
During a survey, the positions of the towed source and seafloor receivers are determined using a conventional Ranger 2 USBL installed on EMGS’s survey vessel, Atlantic Guardian. This system is also used to process positioning data from the Gyro-iUSBL to calculate a tightly integrated navigation solution.
Trevor Barnes, Sales Manager for Exploration at Sonardyne said, “We delivered the first Ranger 2 Gyro-iUSBL system to EMGS in 2013, and at the time it was one of the most technically complex, but highly successful system integrations we had ever undertaken. He added, “Over the last four years it has been proven to meet all of EMGS’ requirements and we’re delighted with their decision today to invest in a second system.”
[blockquote author=” Markus Skarø, VP Acquisition for EMGS”]”SPRINT inertial and iUSBL technology have allowed EMGS to further improve the positioning accuracy of our deep towed EM source system and also provided increased positioning redundancy leading to decreased technical down time.”[/blockquote]
For more information on Ranger 2, click here
Leading offshore drilling contractor, Noble Corporation plc, has selected acoustically-aided inertial navigation technology from Sonardyne Inc., Houston, for its ultra-deep water drillship Noble Globetrotter I. The Marksman DP-INS system is being used to provide a high integrity, independent subsea position reference for the vessel’s GE DP3 dynamic positioning (DP) system as it drills exploration wells in water depths up to 10,000 feet.
Built in 2011, the Noble Globetrotter I is significantly smaller than a conventional drillship but has the same operational capacity. The reduction in size has been achieved through design features such as a hoistable drilling floor, multi-purpose tower and inboard storage of risers which has allowed deck space and equipment handling to be fully optimised. The compact design of the vessel also means operating costs are lower thanks to the smaller wind area and lower hull drag.
The installation of Marksman DP-INS is an example of Noble’s continued commitment to the delivery of performance improvements and operational savings for customers through innovation. The system improves vessel positioning performance by exploiting the long term accuracy of Sonardyne’s Wideband acoustic signal technology combined with high integrity, high update rate inertial measurements. The resulting navigation output provides accuracy and update rate that can exceed differential GNSS completely whilst remaining completely independent.
In addition to the system’s deep water positioning performance and safety benefits, Marksman DP-INS has been proven to deliver valuable time and cost savings for rig operators. By tightly-coupling acoustic and inertial data, robust, accurate positions can be measured using just two and three seabed transponders depending on the application. Not only does this reduce installation and calibration time, it also extends transponder battery life as less frequent aiding updates from the seabed transponders are required.
The equipment supplied to Noble Corporation included Sonardyne’s vessel-fitted inertial sensor and bridge software. Although DP-INS is compatible with HPR systems from other manufacturers, for this installation, it was interfaced with Noble Globetrotter I’s existing Sonardyne acoustic reference system using the same bridge workstation.
[blockquote author=” Dan Zatezalo, Technical Sales Manager at Sonardyne in Houston”]“We’re delighted that Noble has once again chosen to invest in our technology to support their vessel positioning and drilling activities. Marksman DP-INS is a mature, field proven technology which meets industry’s requirements for a robust, independent DP reference, whilst delivering operational savings for vessel owners.”[/blockquote]
For more information on Sonardyne’s Marksman DP-INS click here.