
Author: Edmund Ceurstemont, USBL technical authority
 In July last year I reported on the trials we performed off California (Part 1) to demonstrate the impressive tracking performance of our Lower Medium Frequency (LMF) Ranger 2 Ultra-Short BaseLine (USBL) system. In November we journeyed to the Spanish island of Tenerife – this time to characterise the long range data telemetry performance of the same system.
In July last year I reported on the trials we performed off California (Part 1) to demonstrate the impressive tracking performance of our Lower Medium Frequency (LMF) Ranger 2 Ultra-Short BaseLine (USBL) system. In November we journeyed to the Spanish island of Tenerife – this time to characterise the long range data telemetry performance of the same system.
As a location to conduct trials of marine technology and science platforms, Tenerife and California share at least one thing in common; the ability to access very deep water, very quickly from within a short transit from port. So it’s no surprise that the UK’s National Oceanography Centre (NOC) regularly choose the island to conduct routine equipment tests from.
RRS James Cook–a model vessel
Hosting us for the latest round of our LMF USBL experiments was the Royal Research Ship RRS James Cook. Although the ship celebrated its 10th birthday in 2016, it is still among the most modern research ships currently in service and has been used as a model for many other ocean-going research ships, including several used by Chinese institutes.
Our Medium Frequency (MF) USBL systems are popular for tracking targets and dynamically positioning a vessel in a few hundred metres down to a few thousand. However, when you need to reach full ocean depth or track a towfish over a very long layback, a common need of the ocean science community, then it’s time to consider LMF.

Outwardly, an LMF Ranger 2 USBL is similar to an MF system. But instead of operating in the 19 to 34 kHz frequency range, the vessel mounted transceiver and transponder hardware is built to work from around 14 to 19.5 kHz. This subtle shift halves absorption by the water path, meaning acoustic signals travel further. It can also mean the system is more susceptible to noise interference from the vessel itself. But, as these trials would go on to show, the gain in received signal as a consequence of less absorption, more than compensates for additional vessel noise in the LMF band.
For maximum operational flexibility, the RRS James Cook is permanently fitted with our MF HPT 5000 and HPT 7000 transceivers on her twin USBL spars. This setup presented us with the ideal opportunity to temporarily swap out the HPT 7000 unit with the LMF variant (HPT 7000L) in order to compare it with MF performance in near identical conditions and configuration. The one caveat to this being HPT 5000 has a smaller array giving a wider beamwidth with less noise rejection.
 With the HPT 7000L fitted, a calibration procedure to correct for lever arms and installation offsets was conducted using an omnidirectional Compatt 6 transponder deployed to a depth of 4,400 metres. This produced a calculated slant range error of 0.14% (1 DRMS)– similar to the 0.12% achieved during our Californian trial. In practical terms, this means that when tracking a target 11,000 metres away, 66% of position fixes should be within 15.4 metres.
With the HPT 7000L fitted, a calibration procedure to correct for lever arms and installation offsets was conducted using an omnidirectional Compatt 6 transponder deployed to a depth of 4,400 metres. This produced a calculated slant range error of 0.14% (1 DRMS)– similar to the 0.12% achieved during our Californian trial. In practical terms, this means that when tracking a target 11,000 metres away, 66% of position fixes should be within 15.4 metres.
With the system calibrated and noise measurements made, a series of tests were carried out with the ship steaming away from the Compatt on different courses in order to average out the impacts of environmental conditions. Analysis of these runs again echoed previous trials data with consistent tracking achieved out to a slant range in excess of11,000 metres. Switching to a Compatt with a higher power directional transducer would yield even greater ranges.
Telemetry schemes
The next test involved putting LMF through its telemetry paces over two slant ranges of 4,300 and 7,200 metres to a LMF Compatt 6 which was fitted with a directional transducer.
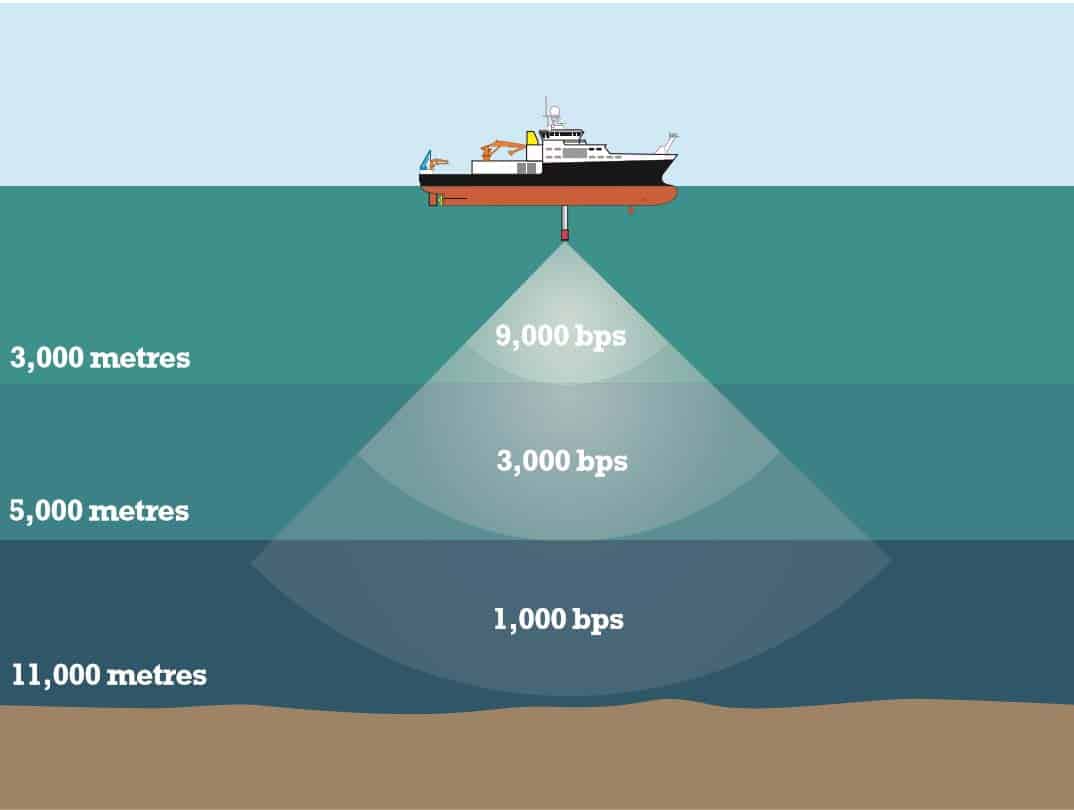
Our 6G (Sixth Generation) family of instruments support seven data rate telemetry schemes, ranging from 200 bps up to a nominal maximum of 9,000 bps. All support transmission of the different telemetry schemes however only multi-element platforms, such as our USBL transceivers, support two of the most robust, high-speed telemetry schemes of 3,000 and 6,000 bps due to their enhanced encoding.
Actual rates achievable are dependent on configuring the delays between packets to minimise errors and consequent retries, which in turn reduce real-world data-rates. The tests were carried out with a default set of delays which are normally used to allow the remote modem time to buffer external data using our different schemes. Actual data rates (including re-tries) were observed in excess of 5,000 bps over a slant range of 4,300 metres at 8 millijoules per bit, and in excess of 2,000 bps over a slant range of 7,200 metres at 17 millijoules per bit.
These results serve to underline how Ranger 2’s impressive ‘out-of-the-box’ positioning and telemetry performance in the MF band reaches new levels of capability when switching to LMF . For anyone taking on the challenges of the deep ocean, LMF is a key enabler for their vessels and has the flexibility to meet their precise in-water and near-bottom sustained observation needs.
This is because LMF not only supports control of deep AUVs and long range towfish tracking, but as these trials have shown, is also highly efficient at harvesting data from a wide range of compatible Sonardyne 6G LMF long-life seabed instruments, LMF telemetry therefore unlocks the full potential of these systems by enabling access to the critical data that they are capable of collecting over deployments, which can be several years’ long.
If you have any questions or would like to run through any of the trial in further detail, please get in touch, I would love to hear your thoughts.