When you’re working in extreme environments, where operational windows are measured in weeks not months, having the right kit on board counts. Geraint West, Global Business Manager – Oceanographic, looks at the challenges of remote science and discovers how the latest generation of polar research vessels is leaving shipyards equipped for success.
The polar regions are among the most challenging environments to operate in, with extremes of weather and long, complex, costly logistics trains. Their critical influence on global processes, including climate, biogeochemical cycles and sea-levels, means they’re also among the most scientifically important areas on earth.
That’s why a small number of specialised polar research vessels (RVs), hosting an increasing number of autonomous underwater vehicles (AUVs) and remotely operated vehicles (ROVs), are dedicated to research in these regions.
But, while the underwater robotic assets hosted by RVs are beginning to reshape the way polar research is done, 24-hour darkness, dangerously low temperatures and ice thickness, still make winter-time RV operations all but impossible. That means maximising the effectiveness of operations – when Arctic or Antarctic seas are accessible – is key.
A new breed of polar research vessel
 These are considerations going into the latest breed of specialist polar RV designs, including the British Antarctic Survey’s (BAS) new vessel, the RRS Sir David Attenborough, and the Polar Research Institute of China’s (PRIC) Xue Long 2 (Snow Dragon 2). Although these two flagship vessels are from yards separated by 5,700 miles – Cammell Laird’s yard in Birkenhead, UK, and Shanghai’s Jiangnan Shipyard – they share many similar features.
These are considerations going into the latest breed of specialist polar RV designs, including the British Antarctic Survey’s (BAS) new vessel, the RRS Sir David Attenborough, and the Polar Research Institute of China’s (PRIC) Xue Long 2 (Snow Dragon 2). Although these two flagship vessels are from yards separated by 5,700 miles – Cammell Laird’s yard in Birkenhead, UK, and Shanghai’s Jiangnan Shipyard – they share many similar features.
Both vessels, which are in excess of 120 m long, will transport cargo and scientists to Antarctic bases – up to 90 onboard the RRS Sir David Attenborough and up to 60 on the Xue Long 2. Both will be fitted-out with an impressive range of scientific equipment and vehicles, much of which has to be deployed outboard of the vessel to gather a range of important marine chemistry, ecology, geology, geophysics and sea ice dynamics data. This equipment is deployed with complex heavy handling systems over the stern and side, as well as through, an increasingly common feature in polar RVs, a moon pool. And, significantly for us, both will be equipped with Ranger 2 USBL tracking technology.
Shallow, deep, noisy
We’ve now more than 25 years’ experience building USBL systems for vessels of all shapes, sizes and roles. But we’re particularly proud of the track record Ranger 2 has earned within the international science community. There, it’s seen as the performance standard for tracking vehicles and platforms from vessels, as well as a dynamic positioning (DP) system reference. In fact, it’s already fitted to BAS’ current polar research ship, the RRS James Clark Ross, the Korea Polar Research Institute’s RV Araon (All Sea), as well as other ice strengthened vessels.
 RVs by their nature work in many different environments; shallow, deep, noisy. So USBLs need must be equally versatile. And Ranger 2 is. It’s built on our Wideband 2 acoustic signal technology and 6G (sixth generation) hardware platform, which enables simultaneous and precise tracking of multiple AUVs, ROVs, towed platforms and seafloor landers to slant ranges in excess of 7 km or 11 km if you opt for the LMF version.
RVs by their nature work in many different environments; shallow, deep, noisy. So USBLs need must be equally versatile. And Ranger 2 is. It’s built on our Wideband 2 acoustic signal technology and 6G (sixth generation) hardware platform, which enables simultaneous and precise tracking of multiple AUVs, ROVs, towed platforms and seafloor landers to slant ranges in excess of 7 km or 11 km if you opt for the LMF version.
The power of Wideband and 6G
Wideband 2 and 6G are key to a host of flexible options, meaning that Ranger 2 is a tool-kit that can be used in a wide range of scientific applications. At a basic level, platform and vehicle positioning are supported by a wide offering of acoustic transponder options, ranging from the Wideband Sub-Mini 6+ (WSM 6+), a versatile, 4,000 m-rated USBL transponder that is easy to install, to AvTrak 6, which combines the functions of transponder, transceiver and telemetry link in one low power unit for the optimum AUV solution. Using Sonardyne Messaging Service (SMS), AvTrak 6 enables two-way transmission of vehicle configuration or status messages, as well as position updates from surface.
That’s just the beginning though. HPT, the system’s vessel-mounted transceiver, is a highly effective modem that supports seven telemetry schemes between 100 – 9,000 bps. This means Ranger 2 can track your sensor packages, but also receive the data they are gathering. Something the science community has been asking for is for Ranger 2 to be able to command Sonardyne acoustic releases. That request has now been addressed with our new RT 6 family of releases.
Protection from ice
Mounting and deployment arrangements for your HPT is always critical for optimal performance. For a polar RV, this has particular significance. Building on our experience, with literally hundreds of installations to date, our deployment systems incorporate a number of modifications and adaptions to mitigate against the harsh environmental conditions of the polar regions. These include use of appropriate materials and installation arrangements that maintain the watertight integrity of your double hull.
In addition, the system fitted to these vessels has an option to lower the pole so that the face of the transceiver is flush with the ship’s hull. This does compromise performance to an extent, dependent on the ship’s self-noise and dynamics, but it also protects the transceiver if ice is likely to be encountered under the hull, such as when actively breaking ice. In open waters, optimal performance is achieved with the pole extended to around 2 m below the hull.

Out of range, beneath the ice
As I’ve mentioned, these ships are also home to an expanding fleet of autonomous and robotic systems. The RRS Sir David Attenborough will host a range of vehicles from the UK’s National Marine Equipment Pool, operated by the National Oceanography Centre (NOC). These include the Isis ROV and the Autosub family of vehicles, which includes the now famous Boaty McBoatface Autosub Long Range (ALR) AUV. Indeed, Isis and the Autosub are no strangers to the polar regions, having been deployed from the RRS James Clark Ross.
As we reported in Baseline 21, the newest member of the Autosub family, the 2,000 m depth rated under-ice Autosub (called Autosub2KUI, or A2KUI for short), is being equipped with our SPRINT-Nav 700 hybrid navigation instrument. SPRINT-Nav will give A2KUI a positional accuracy of 0.01% of distance travelled in a typical survey scenario, giving it the positional capability to operate under the ice far beyond the range of the RRS Sir David Attenborough’s Ranger 2 system.
Tracking assets on the go
Of course not all work is carried out from an RV. In many instances, scientists set up camp on the ice, but, even here, USBL can play its part. BAS has recently confirmed its acquisition of one of our Micro-Ranger 2 USBL systems with our Nano beacons for tracking their divers and small vehicles. It’s a neat addition to the Ranger 2 family which has now grown to three models.
Because Micro-Ranger 2 system uses the same software as a ‘standard’ Ranger 2, BAS scientists can start operating it with no additional training. Its compact size also means it’s great for use from small boats and quaysides, so it’s ideal for the ice-covered waters around BAS’ Rothera Research Station on the Antarctic Peninsula. There, it will not only enable geolocation of scientific seabed samples, but also underpin the safety of BAS’ divers in these hazardous environments.
These latest deployments are the latest in our increasing track record in providing underwater positioning and communications technology that enables polar operators to work with confidence, safety and maximum efficiency in ice covered waters. A further tool to support safe operation of RVs in poorly charted ice-covered waters is our Navigation and Obstacle Avoidance Sonar (NOAS), but that’s a story for another day
Our SPRINT-Nav hybrid navigation instrument is helping to drive a growing move towards the use of resident ROV systems. We visited Norway-based IKM Subsea to find out more.
IKM Subsea has been taking a step-wise approach to resident subsea systems. After building its first all-electric remote operated vehicles (ROVs) in 2015, the company has gone on to introduce a subsea garage system from which their latest vehicles can operate.
Having vehicles based subsea has a number of benefits that more and more operators are seeing. As resident systems, deployed permanently, or semi-permanently subsea, vehicles can be on site, ready for action, 24/7, supported from onshore – reducing cost and increasing safety, operability, and productivity.
Resident ROVs
IKM Subsea’s resident ROV (R-ROV) concept is based on the firm’s 3,000 m-rated Merlin UCV ROV, which operates on a 1,000 m excursion capable tether management system (TMS) from a subsea “E-cage” (or garage). The E-cage is in turn wired to a host platform. Since late 2018, one of these systems has been operating on the seabed at operator Equinor’s Snorre B facility, offshore Norway. It’s available on demand, piloted from offshore and onshore (via a fiber optic link to the beach), on three-month long deployments. Between those deployments, it’s hauled to the surface, using the host facility’s crane, for maintenance.
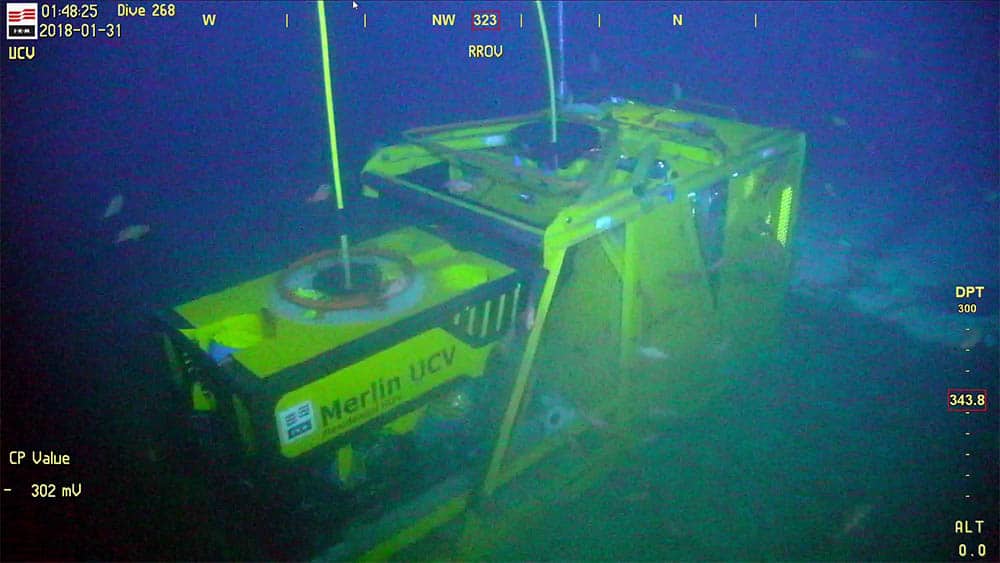
Enabling a subsea resident vehicle poses a number of challenges, from remote control functionality to reducing maintenance requirements. “A key requirement has also been station keeping, to help with certain tasks, when you need the ROV to be stationary,” says Ments Tore Møller, IKM Subsea’s Engineering Manager, “and as a backup mode of operation, if communication is lost. It’s also useful for path-follow mode, when the ROV can navigate itself.”
Compact hybrid navigation
For these capabilities, IKM Subsea looked to SPRINT-Nav. SPRINT-Nav is our compact hybrid navigation instrument built around highly robust and accurate Honeywell ring laser gyro (RLG) inertial sensors, in an inertial measurement unit (IMU), tightly coupled with our Syrinx Doppler velocity log (DVL), and a high-precision pressure sensor. Tightly integrating raw sensor data from these sensors at a low level means higher levels of accuracy and reliability are achieved: ROVs can calculate their position for longer with less drift.
SPRINT-Nav is also fast to initialise, with no need for calibration manoeuvres before getting to work. This is because it runs two algorithms so that the inertial navigation system (INS) can instantly initialise from the attitude, heading reference system (AHRS) in the IMU. It is also due to the RLG’s very deterministic characteristics, compared with other types of gyros.
All of these characteristics make it a very popular instrument for resident ROVs that can be quickly called on to operate, without waiting on weather or spending time getting to the work site.
Going tetherless
This transformation in the ROV world is just starting. There is more that could be done. Some are looking to remove the tether, because survey work today is limited by the length of the tether from a fixed point. Møller believes there will be a need for different vehicles to do different things.
Without a tether, and aided by SPRINT-Nav, a vehicle travel further, between nodes where it could recharge or transfer data. Compatts on the subsea cage would mean that the ROV’s return to its standby position could be automated, supported by anti-collision systems. Our BlueComm free space optical modem, providing live video transmission through the water, enables live remote controlled operations.
Another option is deploying a cage with battery packs, so that it’s independent of both a support vessel and having nearby infrastructure, with communications and control from onshore via a surface buoy and the 4G cellular network, says Møller.
IKM Subsea is also looking at digital twins of the subsea world. SPRINT-Nav would provide positioning alongside a 3D sonar, which could recreate the subsea environment. If communications or the sonar drops out, SPRINT-Nav can continue calculating where the ROV is. A digital twin would also make simulating procedures and training easier and more realistic and reduce time on the real system, says Møller. Next steps include more automation.
With interest in seabed deployed systems increasing, more of these systems are appearing in the market. Their capabilities and concepts of operation will evolve and differ, but they can all rely on our navigation and communications technologies.
Author: Duncan Rigg, Vessel Systems – Technical Lead
Have you ever considered how the quality of the equipment you attach your transceiver to affects your transceiver’s performance?
We have, which is why over the last 25 years we have been developing and perfecting our own deployment machines to suit most vessel types. These have been designed to provide survey grade rigidity, maximising system accuracy.
 Through-Hull deployment
Through-Hull deployment
There are four types of deployment machine available, the first of these is our through-hull deployment machine. It consists of a hydraulically operated pole, a sealed bearing section and a sea chest service section with inspection door. The whole machine sits on a gate valve with the whole arrangement sitting on a through-hull penetration pipe.
Owing to its more complex nature and size, this set up is typically integrated into new build vessels. However, many have been retrofitted when there’s space.

Offshore Support Vessel Through-Hull deployment
The second type of deployment machine is a reduced size version of the through-hull deployment machine, specifically designed for offshore support vessels (OSV) where space is at a premium.
As a result, this deployment machine is intrinsically lower cost – without compromising on performance. The through-hull deployment machine uses an Inconel clad steel pole, for fantastic corrosion resistance. The OSV machine uses stainless steel pole providing good corrosion resistance, but at a lower cost.
Both machines can be controlled from a main control unit, local control unit or an optional bridge control unit as well as through Ranger 2 and Marksman. Both machines offer the option to have remote gate vale actuation.
These machines can be supplied to whatever type approval is required for your vessel, as well as type approved DN350 and DN500 gate valves.

Going over the side
When cutting the hull is not an option we have our over-the-side deployment pole. This is the perfect solution for vessels of opportunity or smaller support vessels.
Made from high grade steel, the highly rigid pole has been designed with a helical strake running up its submerged section. This reduces the chance of vortex induced vibration, which can degrade system performance and lead to pole failure.
The pole is made from 3m sections allowing it to be adjusted in length for the vessel it’s being installed on. Typically, it’s supplied in a 9m or 12m length, with a deck mount pivot for easy access to the transceiver. For vessels where the drop between the deck and the water line is greater than 3m a hull-mount pivot can be supplied.
To protect the pole from corrosion it is made from hot dip galvanize steel coated in a two-part marine epoxy.
The deployment and recovery is left down to the vessel but this is typically done using the vessel’s crane or a third party winch fitted to the over-the-side pole.
 Through-tube deployment
Through-tube deployment
Our final type of deployment system is our through-tube deployment pole. This variation on the through-hull deployment machine has been designed for vessels where gate valves or over-the-side deployment are not viable or practical, due to size and space.
Just like the over-the-side pole, the through-tube pole also uses a helical strake to reduce the effect of drag and vibration. The same steel finishing processes are used here too. And, the through-tube pole can normally be retrofitted to most vessels.
If you’d like to know more about our deployment machine options or to discuss a particular project, please get in touch.
If you missed our video on deployment machine options, you can always watch it here.
By Geraint West – Global Business Manager, Oceanographic
From entire basin-wide acoustic monitoring systems to unmanned surface vessel (USV) survey and data gathering operations, great in-roads are being made into how much we know and are now able to learn about the oceans.
Some of these in-roads were shared at the 63rd Marine Measurement Forum (MMF), held last week.

This fantastic non-profit and non-affiliated event, which we had the pleasure of organising and hosting at the at Farnborough Air Sciences Trust (FAST) museum, brought together people from across science and industry to discuss some of the latest initiatives and technologies in marine measurement.
About 60 attendees heard talks ranging from how we’re tracking sea-life and broadcasting to the world live from underwater submersibles to work that’s helping to clear plastic from the oceans.
Under particular focus was the increasing amount of work being done with USVs. But, it was also great to hear about basin-wide collaborative monitoring efforts and new sensor developments that will enable researchers and industry to sense more with single systems.
 We want to thank all of the speakers who gave their time to share their work, including: the Nekton Foundation, AutoNaut, the National Oceanography Centre (NOC), Chelsea Technologies, the Centre for Environment, Fisheries and Aquaculture Science (Cefas), XOCEAN, Plymouth Marine Laboratory (PML), HR Wallingford, the National Physics Laboratory (NPL), R&V Hazelwood Associates and ourselves.
We want to thank all of the speakers who gave their time to share their work, including: the Nekton Foundation, AutoNaut, the National Oceanography Centre (NOC), Chelsea Technologies, the Centre for Environment, Fisheries and Aquaculture Science (Cefas), XOCEAN, Plymouth Marine Laboratory (PML), HR Wallingford, the National Physics Laboratory (NPL), R&V Hazelwood Associates and ourselves.
Our thanks also go to The Hydrographic Society whose Southern Region evening meeting, chaired by our very own Edd Moller, joined us at FAST following a locally supplied curry and drinks. The focus – The Fourth Industrial Revolution – with talks from XOCEAN and L3 Harris ASV, was a great follow-on from the talks we’d heard during the MMF.
We’re also hugely grateful to our venue, the truly fascinating FAST, which we got a chance to look around between talks. It’s well worth a visit for anyone interested in technology development, not just aeronautical. The museum’s archival material and built heritage date back to 1906 and include a 24ft wind tunnel and a raft of exhibits and aircraft, including a full scale replica of Samuel Franklin Cody’s aircraft – famed for having undertaken the first powered “controlled” flight in Britain.
 But, none of this would have been possible without those behind the MMF. In case you’ve not heard of the MMF, it’s a series of non- profit one-day events focused on the informal exchange of ideas, knowledge, techniques and developments across an extensive range of marine scientific measurement activities. It’s run by a volunteer committee and hosted on a volunteer basis.
But, none of this would have been possible without those behind the MMF. In case you’ve not heard of the MMF, it’s a series of non- profit one-day events focused on the informal exchange of ideas, knowledge, techniques and developments across an extensive range of marine scientific measurement activities. It’s run by a volunteer committee and hosted on a volunteer basis.
While we are making in-roads into what we know about our oceans, there’s still a long way to go. That’s why we’re already looking forward the next MMF, which will be hosted by The Hydrographic Society and in Plymouth in Spring 2020. Keep an eye on www.mmf-uk.org for details, or better still, sign up for the mailing list via the website.
Science equipment and underwater vehicles deployed from Brazil’s flagship oceanographic research vessel, Alpha Crucis, are to be tracked using Ultra-Short BaseLine (USBL) positioning technology supplied by Sonardyne Brasil Ltda.
The 64 m-long vessel, which is operated by the University of São Paulo, undertakes research projects spanning global climate change to biodiversity in Brazilian waters. It will be equipped with a Sonardyne Ranger 2 USBL high precision acoustic positioning system to enable the Alpha Crucis’ 21-strong science team to precisely track their instruments and sensors to beyond 7 km.
Ranger 2 accurately tracks the position of subsea targets by precisely measuring the range and bearing from a vessel-mounted transceiver to transponders on each target. The University of São Paulo has selected Sonardyne’s pre-calibrated Gyro USBL transceiver for the vessel and 4,000 m depth rated Wideband Sub-Mini 6 Plus (WSM 6+) transponders for its in-water equipment, which includes sediment corers, towed cameras, landers and remotely operated vehicles (ROV).
Gyro USBL is pre-calibrated thanks to its perfectly aligned acoustic transceiver and built-in attitude and heading reference sensor (AHRS). This combination eliminates the need for measurements to be undertaken to determine the alignment of the ship’s motion sensors to the acoustic transceiver. Survey operations are faster and more precise, helping to maximise the available vessel time for science.
[blockquote author=” Dr. Prof. Paulo Sumida, Vice-Dean, Oceanographic Institute of University of São Paulo”]”To gather meaningful data to support our studies, first our scientists need to know exactly where their sensors and equipment packages are in the ocean when they make their observations. With Ranger 2, they’ll be able to do just that. It came highly recommended by our colleagues in the international science community giving us every confidence to select it for the Alpha Crucis.”[/blockquote]
André Moura, Sales & Applications Manager from Sonardyne Brasil, says, “The university’s vessel operates from off the coast to the deepest parts of the South Atlantic so it’s important it’s equipped with the best available technologies available to underpin its important work. Ranger 2 Gyro USBL, deployed using our over-the-side deployment pole, is the perfect option for the vessel – it’s quick to install and pre-calibrated. Plus it gives the university the option to move the complete system to another vessel if the need ever arises.”
A/S Norske Shell is launching a 10-year seabed subsidence monitoring campaign at its Ormen Lange field in the Norwegian Sea, using long-endurance sensors from subsea monitoring specialist Sonardyne International Ltd.
Norske Shell’s goal is to continuously monitor any movement of the seafloor at Ormen Lange, Norway’s second largest gas field. The data will help the energy company to detect changes that might be caused by ongoing gas extraction and inform its reservoir management strategy, as it continues to produce from the huge field over coming decades.
By monitoring vertical displacement of the seabed, operators can detect even small production induced changes in their reservoirs and overburdens, which can then help reduce subsurface uncertainties in their modelling and planning.
For the project at Ormen Lange, which will run from 2019 to at least 2029, a field -wide array of 50 Sonardyne Fetch subsea sensor logging nodes configured as pressure monitoring transponders (PMTs) will be deployed in 800m to 1,100m water depth. There, the Fetch PMTs will accurately collect pressure, temperature and inclination data at the seafloor, at pre-programmed intervals, throughout the full 10-year deployment. Using this data, vertical displacement of the seabed will be calculated, enabling Norske Shell to better track what is happening across the field.
This is the latest deployment of Sonardyne sustained observation technology at Ormen Lange. Sonardyne’s Autonomous Monitoring Transponders (AMTs) were used for a five-year, full-field monitoring project at Ormen Lange, starting in 2010. Back then, the AMTs were used to collect millions of acoustic ranges between each instrument, as well as pressure data, to monitor seafloor deformation in three dimensions. During that project, over half a gigabyte of data was uploaded wirelessly to surface vessels during eight data harvesting missions.
For this latest project for Norske Shell, starting this autumn, a number of innovations have been made, including doubling the battery endurance of the sensors to 10 years, and increased pressure sensor accuracy.
Shaun Dunn, Global Business Manager for Exploration & Surveillance, at Sonardyne, says, “We have been working closely with Shell’s geoscience teams at this field for more than 10 years and our latest technology developments have created a sensor which enables operators to continuously monitor seafloor deformation with the extremely high precision that is required for proactive reservoir management.
“Indeed, since the first trial in 2007 and subsequent full-field deployment in 2010-2016, we have doubled the battery life of our Fetch PMTs, from five to 10 years, and we’ve improved their sensitivity. Our ultimate goal is to achieve towards <1cm per year of unresolved relative subsidence. Further advances we have made with our unique AZA (Ambient-Zero-Ambient) technology will move us closer to this goal.”
[blockquote author=” Tomas Frafjord, Senior Project Surveyor, Norske Shell”]”Shell has fully supported Sonardyne for over a decade in the development and improvement of seabed subsidence monitoring technologies that have been used to great effect at several of our fields. While the oil and gas industry drove these initial developments, it is very pleasing to note that they have also become a key tool for the scientific community, enabling scientists and researchers to measure movements of subduction zones and tectonic plate boundaries. This, in turn, is helping to unlock a better understanding of the earth’s dynamics and providing the information which can be used as an early warning system of potentially catastrophic events along major populated coastlines.”[/blockquote]
A new generation of long range, long endurance autonomous underwater vehicles (AUVs) able to travel from port to port is emerging – with the support of Sonardyne acoustic and optical systems. Ioseba Tena, Global Business Manager for Defence and Robotics, takes a look at one.
The concept of a long range autonomous or unmanned underwater vehicle (UUV) able to travel long distances and quietly and covertly hover in strategic locations is a desired and useful capability in today’s world.
In the defence sector, it would enable increased and extended military surveillance and support anti-submarine warfare (ASW) operations. In the commercial world, a long range AUV that can travel from port, carry out a full route survey and then return home again – without intervention – would eliminate the need for costly and risky launch and recovery operations at sea using ships.
With help from our underwater acoustic and optical positioning and communications systems, steps towards realising this capability are now being taken by Canadian underwater systems specialist Cellula Robotics.
Under a programme for the Canadian Department of National Defence’s (DND) science and technology organization, Defence Research and Development Canada (DRDC), Cellula has designed and built a 8.5 m-long, 1 m-diameter, 3,000 m depth-rated vehicle that’s able to carry-out multi-month, long endurance underwater surveillance over a 2,000 km range. It’s called the Solus-LR (Long Range).

The Solus Long Range (LR)
The UUV, which is due to begin sea trials this October, brings together a unique payload configuration innovative onboard power system and integrated navigation and communications suite, in order to meet the DRDC’s All Domain Situational Awareness (ADSA) Science & Technology (S&T) Program objectives, which include enhancing domain awareness of air, maritime surface and sub-surface approaches to Canada, in particular those in the Arctic.
To start with, long-endurance mission capability is being enabled by a new-design high-pressure hydrogen and oxygen fuel cell, delivering 250 kWh of usable energy. But its other secret weapon is a specially designed suction anchoring system, which, deployed via the UUV’s underhull cargo doors, allows the vehicle to tether itself to the seabed in a low-power loiter mode, quietly and covertly listening for a range of targets.

Sonardyne for guidance and communications
Underpinning its guidance and communications – the backbone of any long-duration underwater vehicle – is a suite of our trusted 6G positioning and communications acoustics and high speed optical modems. Critically, to aid the Solus-LR on its multi-month missions, Cellula has integrated our SPRINT-Nav hybrid (Doppler and inertial) navigation instrument. SPRINT-Nav is already proving its worth on deep water autonomous underwater vehicles (AUVs) and remote operated vehicles (ROVs) globally and this is just the latest testament to the performance it offers.
Its high performance is crucial to enabling prolonged autonomy over long ranges. By limiting error growth through dead-reckoning, SPRINT-Nav enables underwater vehicles to travel for longer without surface support. The alternative – i.e. poor navigation performance – would limit the autonomy of the vehicle and therefore its usefulness.
For Cellula, SPRINT-Nav offers not only a high-performance, operationally proven instrument, but also one which is easy to upgrade, thanks to the availability of different grades of Honeywell-engineered ring laser gyros (RLGs) to support different mission performance levels – all packaged in the same form factor.
Endurance trials
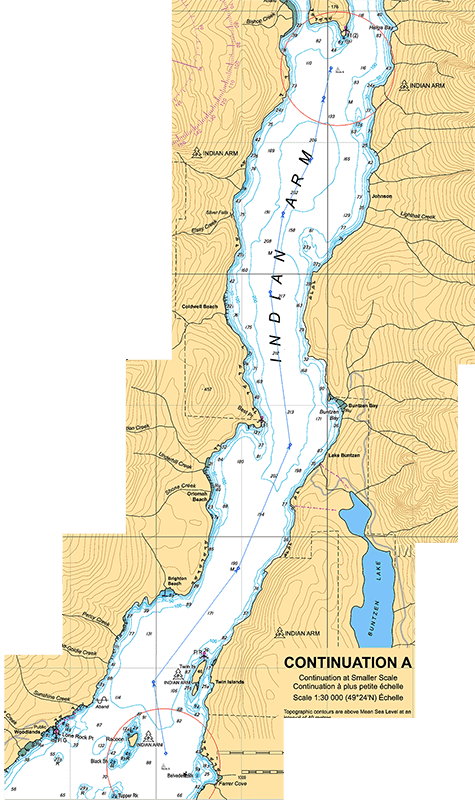 Sea trials start in Indian Arm fjord, near Vancouver, British Columbia this autumn – just 18 months after the project was kicked off. The trial itself will be equally ambitious – requiring Cellula’s Solus-LR to run 10 km laps of a range in the fjord, without surface support for about a month.
Sea trials start in Indian Arm fjord, near Vancouver, British Columbia this autumn – just 18 months after the project was kicked off. The trial itself will be equally ambitious – requiring Cellula’s Solus-LR to run 10 km laps of a range in the fjord, without surface support for about a month.
Integrating trusted, commercial-of-the-shelf technologies (COTS) like our acoustic, inertial and free-space optical sensors into underwater capability programmes – especially naval ones – has considerable appeal. It reduces cost, reduces risk and crucially means that the time needed for new platforms to enter service can be measured in months not years.
The trial will be supported with Compatt 6 seabed transponders, BlueComm 200 optical modems and our Micro-Ranger 2 Ultra-Short BaseLine (USBL) acoustic tracking system with bolt-on Robotics Pack. This will be used for tracking, telemetry and control, supported by an AvTrak 6 Omni-directional combined transponder, transceiver and telemetry instrument, integrated into Cellula’s UUV.
“At the north end of the range, a Compatt 6 will be deployed and surveyed to provide a navigation update to the SPRINT-Nav,” says Cellula’s Business Development Manager, Adrian Woodroffe. “Meanwhile, the south marker will have a Micro-Ranger 2 installed on a surface buoy for acoustic telemetry and position updates and Sonardyne’s BlueComm subsea optical modem installed on a seafloor lander connected to the buoy. The surface buoy will have a cellular data link providing a communication link back to our office.”
Long range and autonomous
“During the demonstration mission, Solus-LR will operate submerged and truly autonomously without a chase boat. Solus-LR will check in with us approximately every six hours as it passes the south marker, with low bandwidth status updates via an acoustic link using the AvTrak 6 on the AUV and the Micro-Ranger 2 on the buoy. Here, it can also receive mission updates and transfer large log files using the high bandwidth BlueComm link. At the North end of the range, the SPRINT-Nav will autonomously use the seafloor Compatt 6 to reduce the INS drift and correct any accumulated position error since the last update.”
Throughout, our application engineering team will be on hand, ready to help. So, Cellula is not only supported by the full range of instruments it needs for the Solus-LR – all from under one roof – but also the engineering support it needs to get the best value from its instruments and us.
We look forward to supporting the trials and seeing the Solus-LR take the next step. The end result could offer new capabilities for defence, survey and monitoring applications, all Sonardyne supported. Get in touch if we can help you achieve your subsea long range autonomous vehicle goals.
International subsea services provider DOF Subsea has equipped a further three of its Brazilian offshore vessel fleet with hybrid acoustic and inertial navigation technology from Sonardyne Brasil Ltda.
Sonardyne’s SPRINT-Nav all-in-one subsea navigation instruments are now supporting five Forum Energy Technologies (FET) remotely operated vehicles (ROV) on board the three vessels. This latest order takes the total number of DOF Subsea’s Brazilian vessels equipped with SPRINT-Nav aided ROVs to six.
SPRINT-Nav combines Sonardyne’s SPRINT sensor, Syrinx 600 kHz DVL (Doppler velocity log) and a high accuracy intelligent pressure sensor in a single housing, making it one of the smallest combined acoustic-inertial navigation instruments on the market. The system is fast becoming the instrument of choice for underwater vehicles, both meeting stringent specifications for subsea inertial navigation and providing industry-leading high-performance positioning – all from a single tightly integrated instrument.
DOF Subsea’s growing fleet of SPRINT-Nav systems will be used to support the company’s ROV operations, as part of construction, inspection, maintenance and repair (IMR) work in Brazil’s deepwater pre-salt oil fields, in depths down to 3,000 m.
[blockquote author=” Fábio Nóbrega, Survey Manager at DOF”]”Having adopted SPRINT-Navs for three of our vessels earlier this year, we’re seeing clear benefits. Not only do we now have high -performance hybrid acoustic aided INS positioning for our underwater vehicles, we also benefit from Sonardyne Brasil Ltda.’s support here in Brazil, from training to support during installation and commissioning, all by local specialised field engineers. Choosing these instruments for our vehicles, underpinned by the support we receive, helps us to provide the excellence our customers require for their deepwater operations here, offshore Brazil.”[/blockquote]
Speaking about the contract, Andre Moura, Sales & Applications Manager for Sonardyne in Brazil said: “It is a great pleasure for us, now being present on six of DOF Subsea’s ROV support vessels in Brazil. This latest batch, which are already installed, is a testament to the relationship we have with our customers here in Brazil, where consistency of local support and collaboration is central to our working ethos.”
This year, Sonardyne is celebrating its 20th anniversary in Brazil, having first set up an office in the country in 1999. Within the last year alone, the company has now supplied nine Brazil based vessels with its acoustic positioning and navigation technologies, from high performance Ultra-Short BaseLine (USBL) systems to its latest hybrid navigation technology.
BP’s first foray into unmanned over-the-horizon operations, using Sonardyne technology and an unmanned surface vessel (USV), is helping it gather strategic data. It’s also a key step towards a more marine autonomous systems led future. Craig Allinson, Survey and Positioning Lead at BP North Sea, explains.
Throughout the life of a field, reservoir management strategies can change and, when they do, we need data to verify what impact we’re having. For the Machar field in the North Sea we changed our reservoir water injection strategy and we wanted to monitor its impact.
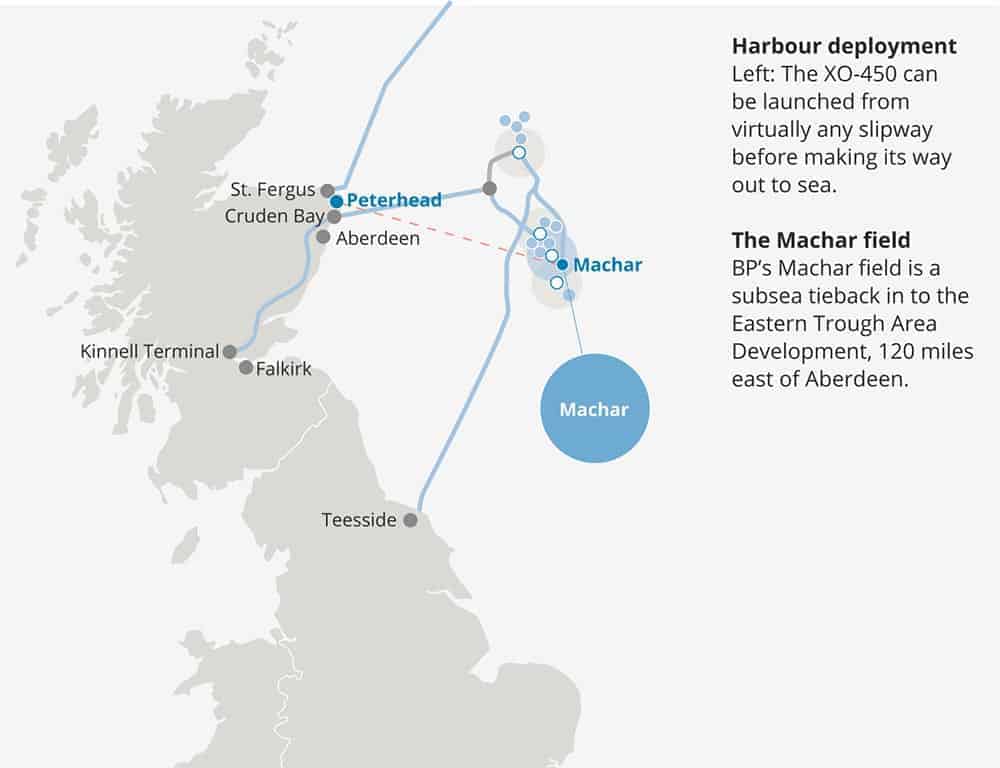
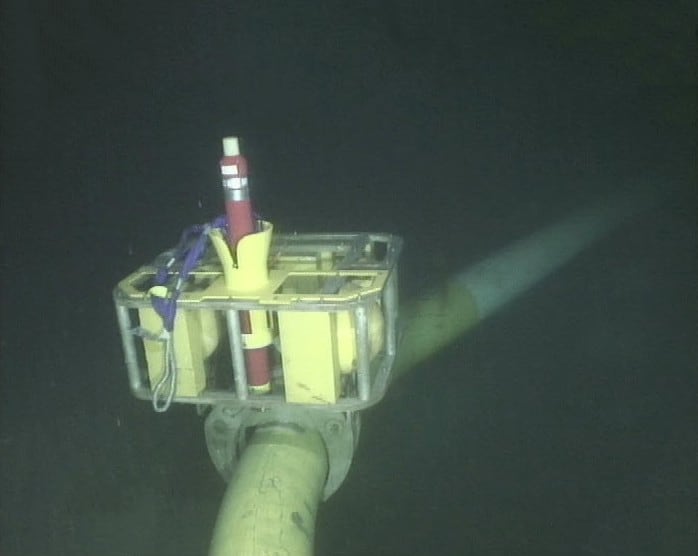
Specifically, we wanted an efficient way to keep a close eye on any seabed deformation in the field. Having considered unmanned operations for some time, we decided, in a first for BP, to use seafloor sensors combined with an unmanned surface vessel (USV), operated over the horizon, for data harvesting. We chose XOCEAN’s XO-450 USV (visit stand 1B57), fitted with a Sonardyne Mini-Ranger 2 6G Ultra-Short BaseLine (USBL) system. The Mini-Ranger 2 has modem functionality, so it can communicate with and retrieve data from Fetch low-power, long-life subsea sensor logging nodes, also from Sonardyne, that were chosen for our seabed deformation monitoring.
Using a USV for unmanned monitoring
The XO-450 is an International Marine Organisation (IMO) compliant, 4.5 m-long USV with a hybrid power system, including a diesel generator and solar panels, powering lithium-ion batteries to drive the electric thrusters and all instrumentation. The vessel has an 18-day endurance capability with communications (including dual redundant satellite communications systems), cameras (including thermal imaging) and navigation lights. It’s able to communicate real time with XOCEAN’s onshore control room, where pilots have a full view of all the systems and can take control at any time, 24/7, so we can use the vessel almost anywhere.

Sensor deployment and data retrieval
The project started in November 2018, when we installed four Fetch sensors over the Machar field. After a few months, we wanted to go out and harvest the data they had collected. So, in early April, the XO-450 was brought by trailer to Peterhead, Scotland, where it was launched from a slipway. The USV used waypoints to safely transit 120 miles out to Machar. Once on site, we located and then started communicating with each Fetch sensor, first to check its health and then to download its data, while the USV held its position, auto-piloting in a 25-30 m radius to let the Mini-Ranger 2 do its work.

After each download, the USV’s satellite communications sent the data to shore, where we confirmed, in real time, that we had the data we needed before moving on to the next Fetch. Throughout these operations, Sonardyne specialists were on hand (remotely) with full access to the XOCEAN real-time data to ensure the harvesting was successful and completed efficiently. When the operation was complete, the vessel transited safely back to Peterhead for demobilisation – within 40 hours of having set off.
Enabling SIMOPS
No project is that smooth of course. We had to wait for a suitable 5-day working weather window for the operation. It came during Ocean Business in Southampton, where the XO-450 was on show. With only a few hours’ notice, XOCEAN were able to drive the vessel up to Peterhead for mobilisation within 24 hours.
Once offshore, there was a light well intervention (LWI) vessel operating close to one of our sensors, which meant we had to negotiate going into their 500 m exclusion zone and perform simultaneous operations (SIMOPS). There was also a concern that the acoustics being used from the LWI vessel and ours – which were using the same frequency – could interfere with each other. So, we took a risk-based approach and started our data collection campaign from the Fetch that was furthest from the LWI vessel, keeping in continuous contact with its crew. There was no interference. We then got within 100 m of the LWIV to access to sensor closest to it and successfully harvested the data without any problems; a SIMOPS success. Had we not been using the USV we would not have been able to get as close to the fetch unit, because it was within the LWI vessel’s 500 m zone, and data harvesting of this unit may not have been possible.

Reducing HSE and emissions
A key reason for us going down this route, for using a USV over the horizon, was to eliminate health, safety and environmental (HSE) risk. Unmanned operations with a small vessel enable us to do that. They achieve a significant reduction in carbon emissions – compared with a manned vessel – and total elimination of the need for humans offshore for this type of work. We also get a significant cost saving, compared with using a conventional vessel.
BP have been pleased with the result of this operation and we have proven the concept of data harvesting with USV. We now have our data from the first harvest and the results are being assessed. The Fetch units are continuing to monitor the seabed at Machar, which will enable us to continue monitoring the seabed, harvesting data twice a year, using the USV, for some years to come.
Underwater navigation technology from Sonardyne International Ltd. has been chosen by subsea equipment specialist Soil Machine Dynamics Ltd. (SMD) for its new electric work class remotely operated vehicle (ROV) range, launched today at Offshore Europe in Aberdeen.
The Quantum EV will be factory-fitted with Sonardyne’s hybrid navigation solution, Lodestar-Nav 200, as standard, enabling new owners to put the ROV straight into operational service after taking delivery.
 The Quantum EV Work Class ROV prototype introduces electric drive technology to the subsea sector in an optimised, modular package which brings electric ROV performance and capability to a new level. Lodestar-Nav is a turnkey navigation solution for ROV control and guidance. It combines a high accuracy attitude heading reference system (AHRS), Syrinx Doppler velocity log (DVL) and survey grade pressure sensor, in an all-in-one instrument, making it less complex to integrate and operate. What’s more, Lodestar-Nav is pre-calibrated providing the ROV pilots with a robust and reliable solution, even in the most challenging operational scenarios, without needing to worry about sensor offsets.
The Quantum EV Work Class ROV prototype introduces electric drive technology to the subsea sector in an optimised, modular package which brings electric ROV performance and capability to a new level. Lodestar-Nav is a turnkey navigation solution for ROV control and guidance. It combines a high accuracy attitude heading reference system (AHRS), Syrinx Doppler velocity log (DVL) and survey grade pressure sensor, in an all-in-one instrument, making it less complex to integrate and operate. What’s more, Lodestar-Nav is pre-calibrated providing the ROV pilots with a robust and reliable solution, even in the most challenging operational scenarios, without needing to worry about sensor offsets.
For complex survey applications, where an inertial output is required, Lodestar-Nav can easily be remotely upgraded in the field to a SPRINT-Nav, Sonardyne’s increasingly popular acoustic-inertial hybrid navigation system.
[blockquote author=” Mark Collins, Director for Remote and Autonomous Solutions, SMD “]”The EV range represents a new philosophy in ROV design focused on performance, reliability, flexibility, ease of use and compact form factor. It makes sense to apply the approach to the sensors we select to fit. Lodestar-Nav exceeds our stringent design criteria and focus on ease of use and reliability. Over the past few months our engineering team has been working closely with Sonardyne’s to fully understand the instrument’s impressive capabilities and complete all the integration and pre-delivery testing regimes.”[/blockquote]
Alan MacDonald, Sales Manager with Sonardyne in Aberdeen, says, “Lodestar-Nav’s 4,000 metre housing is compact and easy to fit with just one cable to interface so fitting it during the build of a vehicle makes a lot of sense. From an end-users’ perspective, taking delivery of your new vehicle with the navigation already taken care is very appealing, and means you can put your new asset to work in less time.”