Marine robotics company, Sonardyne International Ltd. has demonstrated technologies that will aid autonomous vehicle operations in challenging environments under a project funded by the UK’s national Defence and Security Accelerator (DASA).
Working with a 12 m-long SEA-KIT X class unmanned surface vehicle (USV), Sonardyne tested and validated sensors already used by unmanned underwater vehicles for use on USVs in support of missions in coastal waters
Specifically, Sonardyne’s market leading SPRINT-Nav hybrid inertial navigation instrument was integrated into a SEA-KIT X and tested against local real-time kinematic (RTK) GPS positioning, as part of the DASA programme to fast-track autonomous vehicle capability in challenging or harsh conditions.
Loss of satellite-based timing signals needed for navigation and positioning can occur in ports and harbours around tall structures or close to cliffs or inside fjords, where GPS or GNSS receivers may not have a clear line of sight with the sky. It can also happen through deliberate signal jamming or degrading of performance, known as spoofing.
Sonardyne’s SPRINT-Nav is already proven as a reliable navigation instrument for unmanned underwater vehicles, which operate in what is effectively a GPS or GNSS denied environment. Now it will also be used to provide a high integrity, continuously available navigation solution for a USV, like SEA-KIT X, operating in littoral zones in water depths up to 150 m.
SEA-KIT is a 10,000 nautical mile-range vessel able to carry up to 2.5 tonnes of payload and deploy and recover autonomous underwater vehicles (AUVs) and remotely operated vehicles (ROVs). This capability, and flexibility, means it is well suited to support naval missions including intelligence gathering, hydrographic survey and as a communications gateway.
Ioseba Tena, Global Business Manager, Defence and Marine Robotics at Sonardyne, says, “Most USVs rely on uninterrupted GPS or GNSS signal updates to inform their situational awareness and plot a course safely. When there’s no signal, or what’s called spoofing or jamming, USVs must consider alternative navigation sensors and instruments or they need to be remotely piloted adding expense and risk to over-the-horizon operations.
“By integrating SPRINT-Nav onto a USV, such as SEA-KIT, we have shown we can overcome this challenge, providing a continuous and resilient navigation in denied environments capability that will be ideally suited to challenging operations such as mine-counter measures (MCM).”
In total, 21 contracts were awarded by DASA, on behalf of the UK’s Defence Science and Technology Laboratory (Dstl), amounting to £2.1 million in funding. The awards are part of the Autonomy in a Dynamic World competition, launched last year, which aims to address factors that affect the military effectiveness of current autonomous technologies.
Helen Mullender, DASA project manager, says, “The work being funded is to mature autonomous systems with the capability to operate on demand, under all conditions that may be encountered. Military operations are undertaken in all kinds of challenging environment. The inclusion of autonomous systems in these operations will demand their ability to operate effectively and efficiently regardless of the environment.”
The competition is funded through the MOD’s Chief Scientific Adviser’s Research Programme’s Autonomy Incubator project that aims to: Identify and develop underpinning research and technologies to support the development and fielding of unmanned systems across defence which may be matured through the Dstl Autonomy Programme and other Research and Development programmes.
Dstl delivers high-impact science and technology for the UK’s defence, security and prosperity. Dstl is an Executive Agency of the MOD with around 4,000 staff working across four sites; Porton Down, near Salisbury, Portsdown West, near Portsmouth, Fort Halstead, near Sevenoaks, and Alverstoke, near Gosport.
To do real-time SLAM, a new set of algorithms was developed using raw ranges from Compatt 6+ transponders in the SPRINT INS, which is in turn managed by Fusion 2, all in real-time. All you need is a ROVNav 6+ on your ROV, a SPRINT-Nav (or SPRINT INS and a DVL), and one Compatt 6+ transponder at a known or boxed-in location.
Starting at your known location, you then pilot your ROV on a SLAM trajectory, while ranging to the known location and to the Compatts required to be calibrated, to perform SLAM calibrations on each Compatt 6+ in turn – a routine that can be performed concurrently to your pre-lay survey. We have a white paper on what we have learned with regards how to perform SLAM calibrations which is available for people to use for working into their procedures. Just ask us if you’d like to see it.
In a brownfield location, where there are already known positions, and you are, for example, laying a new pipeline for a tie-back project into an existing asset, the SLAM process can be further optimised; put a Compatt at that known location and you’re ready to SLAM straight away, potentially no box-ins required.
Intuitive interface
In Fusion 2, the real-time status of the calibration is displayed intuitively and as soon as the SLAM calibration meets your accuracy criteria the calibration can be finished, and you are straight into tracking. There are no delays due to post processing.
This is still just the start of the journey. We continue to evaluate the scope there is to re-think and simplify survey tasks by taking advantage of SPRINT INS-aided operations in Fusion 2.
We’ve been improving structure positioning by including acoustic heading into the tracking. We’ve also now released a wireless structure deflection monitoring module that can be run in Fusion 2 and we already have Fast-LBL, enabling up to two-second update rates of structures being tracking in full LBL arrays with sensor data – depth, sound velocity, pitch, roll and heading – being streamed wirelessly at the same time.
Rethinking your operations
By looking at your operation differently, you can also do more. For example, at the moment, you cannot track a mobile Compatt on a structure within a sparse array, as you haven’t got a SPRINT INS on it. But, instead you can dock an ROV with our SPRINT INS* onboard onto a structure whilst you track that in sparse LBL mode during installation. Or why not track an ROV in sparse LBL mode, install sand bags as visual markers to mark the structure landing area, and, knowing the markers are installed correctly, position the structure visually?
It’s going back to basics but it works. As Mike Clark mentions in our blog here, a lot of how we operate is restricted due to operator specifications. They say we must have a positioning transponder on the structure to land it, but why?
Remote training for Fusion 2
Want to learn more? If you’re trained in Fusion 1, all you need is a one day top up course to be able to be up and running with Fusion 2. We’re now offering these remotely, on a one-to-one basis, so you can complete the training where ever you are in the world, at home or offshore.
We’ll cover the theory, go through demonstrations and then give you remote access to the software to try it for yourself and run through a host of scenarios to make sure you’re comfortable with your new skills.
Contact our Training Team at [email protected] for more details or watch our video on real-time SLAM calibration here:
*It will also work when your ROV has our SPRINT-Nav 300, 500 or 700 onboard.
Underwater positioning specialist Sonardyne International Ltd. has increased the capabilities of its Fusion 2 software package to enable surveyors and construction personnel to do even more, both on and offshore, with their existing hardware.
This latest release of Fusion 2 unlocks new benefits, including a simplified surface box-in app and the ability to perform wireless structure deflection monitoring, without having to deploy specialist hardware. Additionally, Fusion 2 now includes ‘office’ mode as standard, allowing project teams to plan and fine tune procedures before doing them for real offshore. Multi-user mode now comes as standard when using Sonardyne’s Compatt 6+ transponder arrays, bringing the savings of simultaneous operations to all users.
Until now, structure deflection monitoring (SDM) – a requirement for most construction campaigns – usually meant having to buy or rent dedicated systems that require lots of cabling. Now, with the Fusion 2 SDM rentable add-on module, subsea construction staff can install their existing Compatt 6+s on each corner of a structure that is to be installed, and a Gyro Compatt 6+ and, supported by their existing ROVNav 6+ remotely operated vehicle (ROV) transceiver, launch straight into wireless structure deflection monitoring. This new capability reduces interfaces, costs and complexity, making operations simpler and faster.
With the new complimentary office mode, users can do more from onshore, including planning for LBL and INS offshore campaigns and running tests such as geodetic checks, through to post-processing of LBL calibrations, reducing offshore workload and risk. The new box-in app makes interfacing with third-party USBL systems, such as HiPAP, for range only box-in operations far simpler and easier – and again is enabled as standard.
With just a single cable connection from the vessel’s USBL system to Fusion 2, operators will be able to run seamless real-time box-in operations. What’s more, Compatt 6+ multi-user functionality is now free to access through every Fusion 2 system, enabling up to five different users at any one time for operations from box-in to ROV tracking, all via a simple Compatt selection interface.
Edward Moller, Global Business Manager – Construction Survey, at Sonardyne. “With each update to Fusion 2, we’re adding new capabilities and increasing the ease and simplification of what are in fact complex survey and construction operations. In the past, for many operations, different systems need to be interfaced, which made operations inefficient, and specific hardware was needed for certain operations. Now, it comes in one package that works with the hardware operators already have in their inventories.”
Fusion 2 Version 2.02 will begin shipping from May 19 and is available as a free of charge remote infield upgrade to existing owners of a Fusion 2 license. Users are advised to email their request to: [email protected]. Pricing details of the SDM add-on module is available by contacting your local sales office.
In his first blog on monitoring the restless earth, Geraint West, Global Business Manager for Ocean Science, explained how scientists are able to measure underwater ‘avalanches’, or oceanic turbidity currents using our Autonomous Monitoring Transponders (AMTs). In this second blog, of a three-part series, he explains how the same versatile instruments are being used to measure underwater landslides down the sides of Mount Etna, an active stratovolcano on the east coast of Sicily, Italy.
GEOMar Mt. EtnaI’ve previously outlined, the deployment of an AMT network by the GEOMAR Helmholtz Centre for Ocean Research in Kiel to monitor deformation on the Nazca-South American plate boundary using direct ranging measurements with AMTs. Derived from Long BaseLine (LBL) acoustic positioning techniques, this involves acoustically measuring the change over time of the relative horizontal displacement between pairs of transponders, while integrated high-resolution pressure sensors measure the change in their relative vertical displacement.
This technique results in millimetric measurement of relative movement between transponders at a high temporal resolution, providing detailed information about seabed deformation over a local area.
Using this technique, GEOMAR measured underwater slippage of the southeast flank of Europe’s most active volcano, Mount Etna, for the first time between April 2016 – July 2017. Satellite observations have previously shown that the flank of the volcano is slowly sliding towards the sea. But, until a network of AMTs was deployed beneath the waves, it was impossible to confirm if and how the submerged segment was moving.
Fetch Scenario 2The GEOMAR array comprised a network of five AMTs placed astride of the fault in about 1,200m water depth. Three were on the presumed unstable flank and two on the adjacent stable slope. Measurements logged during a 15-month period confirmed that the entire flank of the volcano is in gravity-driven motion. In one event, the slope slipped about 4 cm in just eight days. The consequences are potentially dramatic.
“The entire slope is in motion due to gravity. It is therefore quite possible that it could collapse catastrophically, which could trigger a tsunami in the entire Mediterranean,” explains Prof. Heidrun Kopp, co-author of a paper on this project.
While there is still more work to be done towards fully understanding the processes at work on coastal volcano flanks, Dr. Morelia Urlaub, another study co-author, is excited about the potential to greatly improve understanding of these processes; “Our investigation shows that the sound-based geodetic monitoring network can be a tremendous help in this respect.”
Read the first blog here.
Maritime technology specialist Sonardyne International Ltd. has introduced a collision avoidance capability for naval, commercial, passenger and private vessels with its new Vigilant forward looking sonar (FLS).
Providing live and past vessel track, detailed 3D bathymetry out to 600 m and automated warnings of unseen collision hazards on and beneath the waterline out to 1.5 km, Vigilant FLS offers mariners with unprecedented subsurface situational awareness.
Compact in size and with mounting options for both new build and retro-fit, Vigilant is suitable for vessels of all sizes and types; expedition cruise, research and exploration, coastguard, private yachts and merchant shipping. It’s also supports naval platforms, from military ships to diver delivery systems (DDS) entering challenging operational zones.
When underway, Vigilant provides crew with an early warning of hazards, from rocks and wrecks to sand banks and otherwise hidden, below-the-surface obstacles, over a 90 degree field of view. This makes Vigilant ideal for both day-to-day operations in busy commercial waters as well as more remote off-chart excursions or operations in dynamic environments, for example, approaching a harbour following a natural disaster.
For unmanned surface vehicles (USV) of the type increasingly being employed to conduct intelligence gathering and over-the-horizon reconnaissance missions, Vigilant comes ready to support onboard automatic control and obstacle avoidance systems, enabling full below the waterline awareness.
Vigilant provides two operational modes: 3D and Sonar, which helmsman and vehicle pilots can seamlessly toggle between. Sonar mode detects obstacles in the water out to more than 1,500 m giving large vessels in particular, valuable time to react. The system’s configurable alarms ensure hazards are not overlooked during periods of high operator workload.
In 3D mode, users are able to view an easy to interpret, real-time generated three-dimensional colour map of the bathymetry out to 600 m, clearly identifying between safe and unsafe areas, while sonar mode continues in the background, at the selected range. Users are also able to view a profile display, showing the depth of any obstacles on the vessel’s heading or a specific bearing.
Vigilant offers multiple mounting and integration options including permanent, through-hull deployment and interfacing with third-party command and control systems or electronic charting displays and is suitable for both new builds and already commissioned vessels.
[blockquote author=” Derek Lynch, Sonardyne’s Global Business Manager for Marine Vessel Systems”]”Every day, we hear of ships of all types and all over the world running aground or colliding with unseen submerged objects, sadly including endangered mammals and ecosystems. The costs and consequences in all respects can be enormous. These incidents occur for many different reasons, some human, some technical, but in every case, there is a lack of subsurface situational awareness. Vigilant is the most capable (longest range, highest area coverage, highest resolution) commercially-available forward looking sonar on the market and it is an invaluable tool to help mariners avoid these situations.”[/blockquote]
Ioseba Tena, Sonardyne’s Global Business Manager for Defence, says: “Vigilant FLS is a powerful new tool for those working in theatres of operation where knowing what lies ahead is mission critical. Humanitarian relief is a great example. Often, navies delivering aid are first to arrive on scene following a natural disaster. With Vigilant onboard, crews would know if the seabed on approach to a harbour or landing zone has changed following a storm. From minehunters and expeditionary vessels to swimmer delivery systems and unmanned underwater and unmanned surface vehicles, Vigilant is highly capable, flexible, easy to use and service-ready.”
On land, rapid events like landslides and earthquakes are easily measured with satellite imagery, while precise measurement of much slower tectonic plate movements using space geodesy techniques have become routine. Unfortunately, neither of these techniques work underwater, which has meant that such measurements have stopped at the waterline – until now. In a three-part blog, Geraint West, Global Business Manager for Ocean Science, explains some of the research Sonardyne technology has been helping.
Whether it’s a fast-moving landslide or tectonic plate movement on a geological timescale, the reality is that, in one way or another, much of the earth’s surface is in motion. On land, surveyors and scientists now take the ability to measure centimetre (or even millimetre) displacements of the earth’s surface, using a variety of space-based technologies, including GPS, very long base interferometry (VLBI) and satellite laser ranging (SLR), for granted. Unfortunately all of these techniques rely on electromagnetic wavelengths, which are unable to penetrate below the surface of the sea – at least not to a scientifically useful level. The consequence is that there have been major gaps in the understanding of deformation mechanisms at the seabed and the ability to model them in relation to movements on land.
Based on technologies originally developed for the oil and gas industry, to measure seabed subsidence, we have been working with diverse commercial and academic partners to develop new techniques and technologies for directly measuring the movement of the seabed, even when it’s beneath many kilometres of seawater. The result is that our versatile technology is now being used in a wide variety of projects that are improving the understanding of seabed processes, from short and violent high velocity events to very slow tectonic plate movement.
At the heart of these studies is Sonardyne’s Autonomous Monitoring Transponder (AMT) and its long-endurance relative, the Fetch subsea sensor logging node. Derived from our 6G Compatt transponder, these instruments are designed to acoustically measure the two-way transmission time between pairs of instruments, as well as make high-precision pressure measurements at the ocean bottom, to ascertain depth. Additional sensors, including for temperature and inclination, complement these to make highly capable scientific data gathering instruments. Furthermore, integrated Wideband 2 high speed telemetry enables both offloading data from the seabed instruments at data rates between 100 – 9000 bps to a variety of surface Dunker systems, and their remote (re-)configuration from the surface. The latest versions of Fetch have sufficient battery capacity for in-situ operation in excess of 10 years, resulting in a tool that provides both the sensitivity and long-duration performance required for seabed applications, even in extreme depths.
Underwater ‘avalanches’ – measuring oceanic turbidity currents
Used as a standalone instrument, between October 2015 and April 2017, an AMT was deployed in of one of the most challenging environments that our technology has ever been subjected to. Led by the Monterey Bay Aquarium Research Institute (MBARI), the ambitious objective of the Coordinated Canyons Experiment (CCE) was to make the most detailed direct observation of oceanic turbidity currents yet undertaken. These ‘avalanche’-like events are responsible for carrying vast amounts of sediment (including globally significant volumes of organic carbon) into the deep ocean, while carving out submarine canyons that are similar in proportion to the Grand Canyon on land. Turbidity currents are unpredictable and powerful with frontal velocities of up to 19ms-1 . At this rate, they have the potential to destroy pipelines and communications cables in their path. This makes them extremely challenging to measure. Hence, scientists have been unsure of the basic characteristics of these flows and, in particular, whether they are entirely dilute or driven by a dense basal flow of sediment.
The CCE deployed more than 50 instruments in the Monterey Canyon, including an AMT mounted on top of an 800 kilogram 2.5 metre-high tripod frame. During the CCE, this frame was moved down canyon by the turbid flow six times, including on 15 January 2016, when it was moved 4.2 kilometres down the canyon in one day. When it was located, half buried in the seabed, the AMT was redeployed, before it was again moved on 24 November 2016; this time 0.9km from where it was located and buried on its side in a 2m-thick sediment layer with only one tripod foot sticking above the seafloor. The events that caused these movements all originated in less than 300m water depth and then travelled up to 50km down canyon, past the deepest instruments in 1,850m water depth.
The fact that the AMT moved at broadly similar speeds to other instruments that were also carried downstream is a strong indicator that these were all rafted in a moving mass of water-saturated sediment, often up to 15m-thick, rather than being dragged by a dilute flow. During these deployments, the AMT’s temperature sensor clearly recorded tidal oscillations prior to movement, but on burial this signal became damped, although the record indicates a further five subsequent movements post burial. Charlie Paull, MBARI marine geologist and first author of the recent Nature Communications paper describing the experiment said that, “for years we have seen instruments on the bottom move in unexpected ways, and we suspected that the seafloor might be moving. Now we have real data that show when, where, and how this happens.”
Sonardyne International Ltd. and XOCEAN have successfully completed a pioneering live seabed-to-shore data harvesting mission using an unmanned surface vessel (USV) for A/S Norske Shell, as part of a seabed monitoring campaign at the giant Ormen Lange field offshore Norway.
The project, completed early Monday (April 20) morning, without a single person having to travel offshore or from their home office, was achieved with significantly less emissions, health and safety risk and cost than could be done with a manned vessel.
By using an XOCEAN XO-450 USV to harvest data from an array Sonardyne’s long-endurance Fetch pressure monitoring transponders, an estimated 5.4 tonnes of CO2 per day was prevented from being emitted into the atmosphere, had a manned vessel had been used. XOCEAN’s USVs have a negligible carbon footprint – around one thousandth of the emissions of a conventional vessel – and all other emissions are offset, resulting in a fully carbon neutral operation.
The project, which saw the USV transit a total of 300 km from Kristiansund out to the Ormen Lange field and back, over just three days, is also thought to be one of the largest data harvesting missions, using a USV, to date.
In addition, it proved the ability to support this type of operation remotely without anyone involved having to travel, safely meeting current Covid-19 movement restrictions. The vessel was ‘posted’ to Norway and then launched by local marine operations service provider, SafePath AS. All other team members, including Sonardyne’s remote operations specialists in the UK, XOCEAN’s USV pilots in Ireland and Shell’s geophysicists in Norway and the US, remained working from their home offices.
The Fetch PMTs were deployed in 800 – 1,100 m water depth at the Ormen Lange field last September to support a long-term seabed monitoring campaign.
The Fetch PMTs accurately collect pressure, temperature and inclination data at the seafloor, at pre-programmed intervals. Using this data, any vertical displacement of the seabed can be calculated. The data will help Norske Shell to proactively inform its reservoir management strategy.
Sonardyne’s long-life Fetch PMTs incorporate a high-speed acoustic modem, which allows stored data to be extracted at any time, wirelessly through the water, on demand. On this mission, the XO-450 was equipped with a compatible Sonardyne acoustic transceiver attached beneath its hull.
Shaun Dunn, Sonardyne’s Global Business Manager for Exploration and Surveillance said, “We have always been big advocates of collecting data from our subsea instruments remotely using autonomous platforms. This technology is now coming of age and makes complete sense when thinking about the environment, the safety of offshore personnel and minimising cost. What’s more, thanks to the low hull and propulsion noise USVs can achieve, the data gathering is also faster, adding further to the efficiencies of this approach.”
[blockquote author=” James Ives, CEO of XOCEAN “]”Our USV platform has demonstrated itself to be a safe, reliable and ultra-low carbon solution for the collection of ocean data. We are delighted to be working with A/S Norske Shell and Sonardyne International on this ground-breaking project”[/blockquote]
Ioseba Tena – Global Business Manager – Defence & Robotics
When I started working at Sonardyne International a few short years ago, we were known as a leading manufacturer of subsea instrumentation – primarily working within the offshore sector. My role was to look at how our instruments could add value to vehicle platforms, which were typically manufactured by others. This included integrating our Solstice multi-aperture sonar (MAS) into portable autonomous underwater vehicles for mine countermeasures (MCM).
Today, that’s still my role, but – as you may have heard – we’re now part of a bigger picture; Sonardyne Group. Over the past 12 months, other companies have joined us and, as anyone with an extended family knows, being part of a group changes how you look at the world.
So, how is being part of group changing things? Opportunities is one word that springs to mind. And here’s an example. Recently, EIVA joined the group; they’re a world-leading and highly regarded Danish software and mechanical engineering house for subsea applications. In their portfolio they have a lot of neat tools. In our portfolio, we have a game changer: Solstice. A multi-aperture sonar (MAS) that has been making waves by enabling substantially higher area coverage rates (ACR) using low-logistics AUVs. It was designed by Wavefront Systems, another one of Sonardyne’s sister companies.
Bringing together Solstice, SPRINT and Scanfish
 Last year, our technical and commercial teams got together and decided it would be worth trialling our Solstice onboard their ScanFish 3D. ScanFish is a very capable remotely operated towed vehicle (ROTV) that’s widely used for unexploded ordnance surveys (UXO) and known for its stability in flight; stability that Solstice requires to get best imaging from the system. But we decided we didn’t want to leave it there, we also agreed to mount a SPRINT INS, a DVL and a Mini-Ranger 2 USBL system. Project Equinox was born.
Last year, our technical and commercial teams got together and decided it would be worth trialling our Solstice onboard their ScanFish 3D. ScanFish is a very capable remotely operated towed vehicle (ROTV) that’s widely used for unexploded ordnance surveys (UXO) and known for its stability in flight; stability that Solstice requires to get best imaging from the system. But we decided we didn’t want to leave it there, we also agreed to mount a SPRINT INS, a DVL and a Mini-Ranger 2 USBL system. Project Equinox was born.
A new tool for mine countermeasures
For some time now, we’ve seen a growing requirement from world navies to adopt unmanned surface vessels (USVs) to conduct MCM in the littoral. We knew the biggest challenge was the quality of the sonar data and the positioning of those mines. It was obvious as a group of companies we had all the technological ingredients needed – except of course for the USV. I recall the moment Jeppe Neilsen, EIVA’s CEO, realised we could offer a low-cost, low-logistic alternative to traditional synthetic aperture sonar (SAS) systems. It was over dinner at an internal training event in November of 2019. Then are there we made the decision to bring the different elements needed together – software, sonar, positioning and navigation – and trial the outcome.
We agreed the plan; EIVA would design and manufacture a custom pod to hold our SPRINT INS and Solstice. We also integrated acoustic aiding using a Mini-Ranger 2 USBL.
Across -team collaboration – fast track integration
We conducted an initial trial at the start of the year with all the parts, except the ScanFish, in our Plymouth trials facility. Then we shipped the gear to Denmark. In February we mounted the system on the ScanFish and, for the first time, and put it all in the water.
“We used Aurora, a local a university-owned research vessel that is regularly called upon to support EIVA’s own trials,” John Chapman, Wavefront System’s Managing Director recalls.
[blockquote author=” John Chapman, Wavefront System’s Managing Director “]”We expected a lot of headaches, our teams are all experienced, but this was the first time we attempted to work together as part of the group. Using proven products makes it all so much easier. We were up and running in record time”[/blockquote]
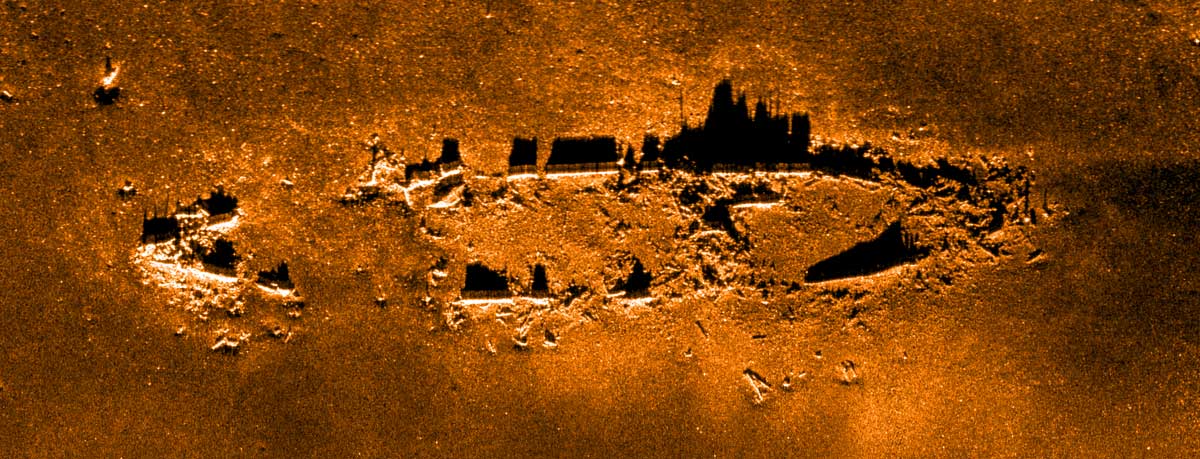
Graham Brown, Managing Director at Sonardyne, liked what he saw! “The wreck we chose to survey is a well-known site commonly used to trial side-scan and multibeam equipment,” he says. “It’s well charted and would serve as a great comparison for the system. Local legend claims it’s a sunken troop carrier from the war. I was taken aback by the quality of the navigation and the sonar data. I expected it to be good, but this was better. Sub-meter accuracy from a sonar survey.”
I liked what I saw too and I am sure you will. It’s impressive what we achieved as a group in such short period of time. It’s created a great new tool for mine countermeasures. All of us at EIVA, Sonardyne and Wavefront were really looking forward to engaging with our customers at shows like Oceanology, Sea-Air-Space and UDT 2020 on it. It was a great outcome which we wanted to let people know about. If you were planning, like us, to be there and want to find out more then don’t hesitate to get in touch with us and we can arrange an online meeting. We’d be delighted to show you more.
Underwater technology provider Sonardyne International Ltd. has announced important new additions to its 2020 product line-up, all designed to play a role in delivering users’ data from the seabed to the shore.
With a focus on compact yet highly capable unmanned and vessel instruments, Sonardyne has unveiled SPRINT-Nav Mini, the most compact guidance and control solution in the market, as well as ADCP functionality for its Syrinx Doppler velocity log (DVL) and a smaller, lighter version of its popular Gyro USBL transceiver.
SPRINT-Nav Mini provides guidance and control outputs – orientation, velocity, altitude and depth – in a single instrument that weighs just 0.7 kg in water for the 300 m-rated version. By tightly fusing the information from each of its sensors, SPRINT-Nav Mini provides precise, robust and fixed frequency outputs, independent of each individual sensor’s update rates. In replacing the need for three separate instruments; AHRS, DVL and pressure sensors – customers will benefit from reduced cost, less cabling and additional vehicle payload capacity.
SPRINT-Nav Mini comes in a highly compact 215 mm-high and 149 mm-diameter housing and is also available in a 4,000 m-rated titanium unit of the same size making it ideal for smaller remotely operated vehicles (ROVs).
Sonardyne is also introducing its second-generation Gyro USBL. It combines the vessel heading, pitch and roll data that’s critical to Ultra-Short BaseLine (USBL) system performance, with an acoustic transceiver – all in one housing. But, using the experience it’s gained from designing complex and compact sensor assemblies, the new Gyro USBL is now 30% shorter and 40% lighter. That means more vessels, including small vessels of opportunity and unmanned surface vessels, can get the best performance from their USBL using an even easier to handle and install instrument.
[blockquote author=”Graham Brown, Sonardyne International’s Managing Director”]”Our customers across the energy, defence and civil markets want to do ever more in the ocean space, increasingly through remote operations,”[/blockquote]
Gyro USBL is available in two performance levels; a cost-effective version for standard USBL operations and “plus” for long layback tracking and touch-down monitoring. Both versions will be delivered pre-calibrated, in-water, enabling users to get straight to work.
Finally, Sonardyne has also increased the functionality of its Syrinx 600 kHz DVL. Specifically, Syrinx now has optional acoustic current Doppler profiling (ADCP) capability, as well as dual DVL/ADCP operations, without compromising bottom track. The ADCP data can be viewed and analysed using the new Echo Observer software.
When using SPRINT-Nav, which comes with a tightly coupled Syrinx DVL built-in, the addition of ADCP functionality really comes into its own. Users can get absolute profile velocities in the most challenging conditions while maintaining SPRINT-Nav’s class-leading navigation performance. When bottom track is not available, inertial velocities from SPRINT are used by Syrinx to compensate the ADCP water column velocities for vehicle motion. That means users get absolute water velocities through the local water column, even when they have no DVL bottom track.
“Our customers across the energy, defence and civil markets want to do ever more in the ocean space, increasingly through remote operations,” says Graham Brown, Sonardyne International’s Managing Director. “We’ve been supporting them every step of the way, from seabed to shore, with smaller and more capable systems. Our latest products and capabilities – which we had intended to demonstrate this week in London at Oceanology – will further support their goals across an even wider range of assets, from smaller ROVs to small manned and unmanned vessels of opportunity.”
Want to know more? Following the postponement of Oceanology International 2020 in London from March 17-19 to December 1-3, Sonardyne is bringing its show news online. Throughout this week (March 17-19), the company will be posting content across its social media channels.
Leading marine technology provider Sonardyne International Ltd. has announced Graham Brown as its new Managing Director.
Graham, who takes over the role from John Ramsden on April 1, has served on Sonardyne International’s board from 2008, most recently as Sales and Marketing Director and Deputy Managing Director.
John, who has been Sonardyne International’s Managing Director since 2009, is staying within the Sonardyne family, taking the role of CEO of Sonardyne Group, the newly formed parent company of Sonardyne International and its sister companies; Chelsea Technologies, EIVA, Wavefront and 2G Robotics.
“This is an exciting time for Sonardyne International,” says Graham. “Looking beyond the current, uniquely challenging business climate, we’ll continue to grow organically, in terms of our people, our technology offering and the global markets which we support – while upholding the service and support that we’re renowned for. But we’re now part of a wider group of companies, with access to a considerably enlarged portfolio of products and services that complement our own seabed-to-shore systems. We expect this to deliver significant operational benefits for our customers across the global energy, ocean science, civil and defence markets.”
[blockquote author=” John Ramsden, CEO, Sonardyne Group”]”Next year will be Sonardyne’s 50th year in business and I’m proud to have played a significant role in the success of the company over the last two decades”[/blockquote]“As we look forward to celebrating that half century milestone with Graham at the helm, our collective sights are focussed on the direction we’re headed in at the start of our second half century. As CEO of Sonardyne Group, I’m excited at the prospect of working with Graham and his counterparts across our business to support those who measure, navigate, communicate or explore the world’s waters and oceans, safely, responsibly and more efficiently than ever before.”
Graham is an Electromechanical Engineer by background with a first-class degree and Ph.D. He is also a Chartered Engineer, a Fellow of the Institute of Directors (IoD), a Fellow of the Institute of Marine Engineering Science and Technology (IMarEST), and a member of the Society for Underwater Technology (SUT). He contributes to a number of industry groups such as the Southern Region Council of the Energy Industries Council (EIC).