
Over the past three years we focused heavily on building our latest obstacle avoidance sonar. We set ourselves significant targets. We wanted our latest forward looking sonar (FLS) to do everything and more than our previous FLS, enabling navigation in challenging environments, such as uncharted or dynamic waters. But we also wanted to design a system compact and low-power enough that it could be easier to install into smaller vessels – even swimmer delivery vehicles (SDV) or uncrewed/ unmanned surface vessels (USVs). And we wanted it to come with a simple, intuitive interface with automated alarms and easy to interpret seafloor bathymetry so that users, from oil tanker captains to underwater gear clad SDV operators, are always aware of their underwater environment in a way that’s easiest for them.

Collision avoidance with Vigilant
The result is Vigilant. We like it and our customers, from Superyacht to SDV owners, do too. But we’re always really happy to try it out on new vessels and in new environments. So we were hugely excited to be invited to demonstrate Vigilant to the Stiletto Maritime Demonstration Platform at the Naval Surface Warfare Center Carderock Division (NSWCCD) in Virginia, US. Stiletto was looking, specifically, for capability demonstration of real-time obstacle avoidance for high-speed landing craft in shallow waters, using vessel-mounted surveillance systems.
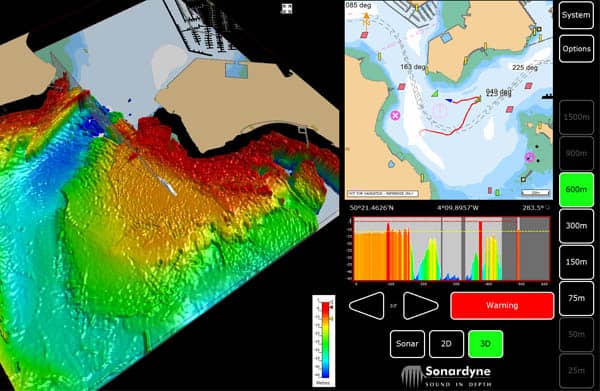
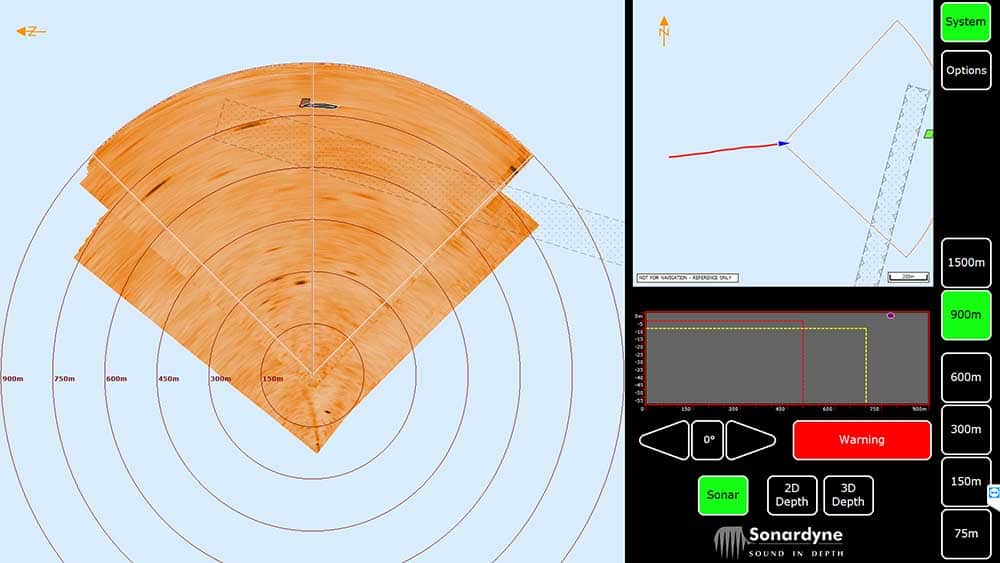
Just in case you don’t know, Vigilant is our long-range, forward-looking sonar for seaborne obstacle avoidance. It works by transmitting acoustic energy into the water, through a 90 degree azimuth and through a vertical plane down to 100 m water depth – deeper than any other system in the market. It then listens for the sonar returns. These are used to detect objects in the water column out to as far as 1,500 m (4,921 ft) away in Vigilant’s Sonar made. In 3D mode, frequency encoded sonar returns are processed through a unique Altitude Confidence Filter (ACF) in order to create a really easy to interpret 3D visualization of the seabed depth and bathymetry and depth of objects in the water column, all out to 600 m (1,968 ft) down to 100 m depth. This data is also retained, so it’s easy for navigators to retrace their steps.
3D bathymetry and long range obstacle detection
The user can seamlessly toggle between Sonar and 3D mode, depending on their navigational requirements – with zero delay in the data displayed on their graphical user interface. So, in open waters, its configurable CAD markers can alert the operator (or a third-party AI based processor) to the presence of a navigationally relevant obstacle, such as coral reefs, rocks, containers or even small ice bergs. In shallow waters and close to shore, they might prefer to see the bathymetry and water depth ahead. The bathymetry is so clear it can even be used to find a good anchorage – and they’ll still get the CAD marker alerts, even when in 3D mode. It’s just these sorts of details the Stiletto team were interested to see.
We mobilized to the Chesapeake Bay area in Virginia (not to far from my office in the DC Metro area), where NSWCCD’s Combat Craft Division is based, and got set up. At this point we have to thank the Stiletto team for helping us with our sonar head deployment pole. Being a temporary deployment, the sonar head was mounted externally using a pole mount. But we were sent the wrong type of pole, so we needed to make some last minute changes. Thanks to the Stiletto team’s help, we got a new deployment system rigged up on the navy range test craft and we were soon out on the sea trials running over three days – socially distanced of course – in and around Chesapeake Bay. Despite some pretty rough weather on the first day and having to give up mid-day on the third day, as our last-minute deployment pole set-up gave out in what was fairly rough weather, we got some great results.
Meeting mission objectives
The challenges set by the Stiletto project included being able to detect obstacles (such as mine like objects, debris or boats) while the vessel is transiting at speed of up to 10 knots, see out to 914 m (3,000 ft) in up to sea state 3 or greater for longer than 24 hours. Near real-time data would be required, with audible alerts, an easy to use visual display that can overlay on navigational charts, such as EDCIS, with no specialist training required for its use. And the vessel it’s mounted on must be able to beach. We were pretty confident it could achieve all of these tasks and more. For example, we’ve proven Vigilant at up to 25 knots and our ability to detect obstacles out to 1,500 m in sonar mode.
During the trials we were pleased to demonstrate some of these capabilities, including detecting a floating navigation marker at 1,090 m distance in Sonar mode while in less than 8 m water depth and a channel market at 850 m in similar depths.
We’d like to thank the Stiletto team for inviting us to demonstrate Vigilant. If you’d like to learn more about Vigilant, please get in touch.