What is GNSS-A?
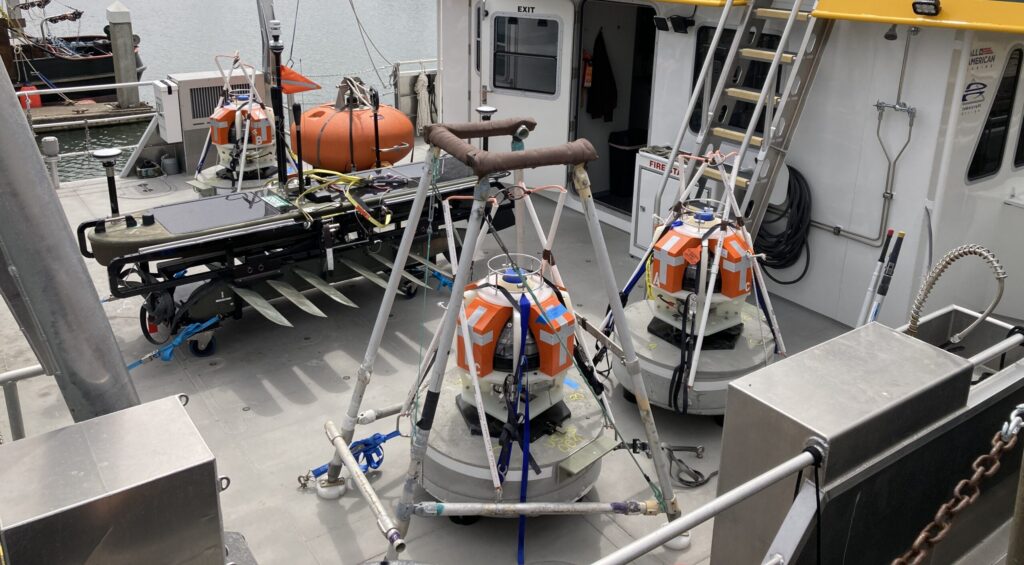
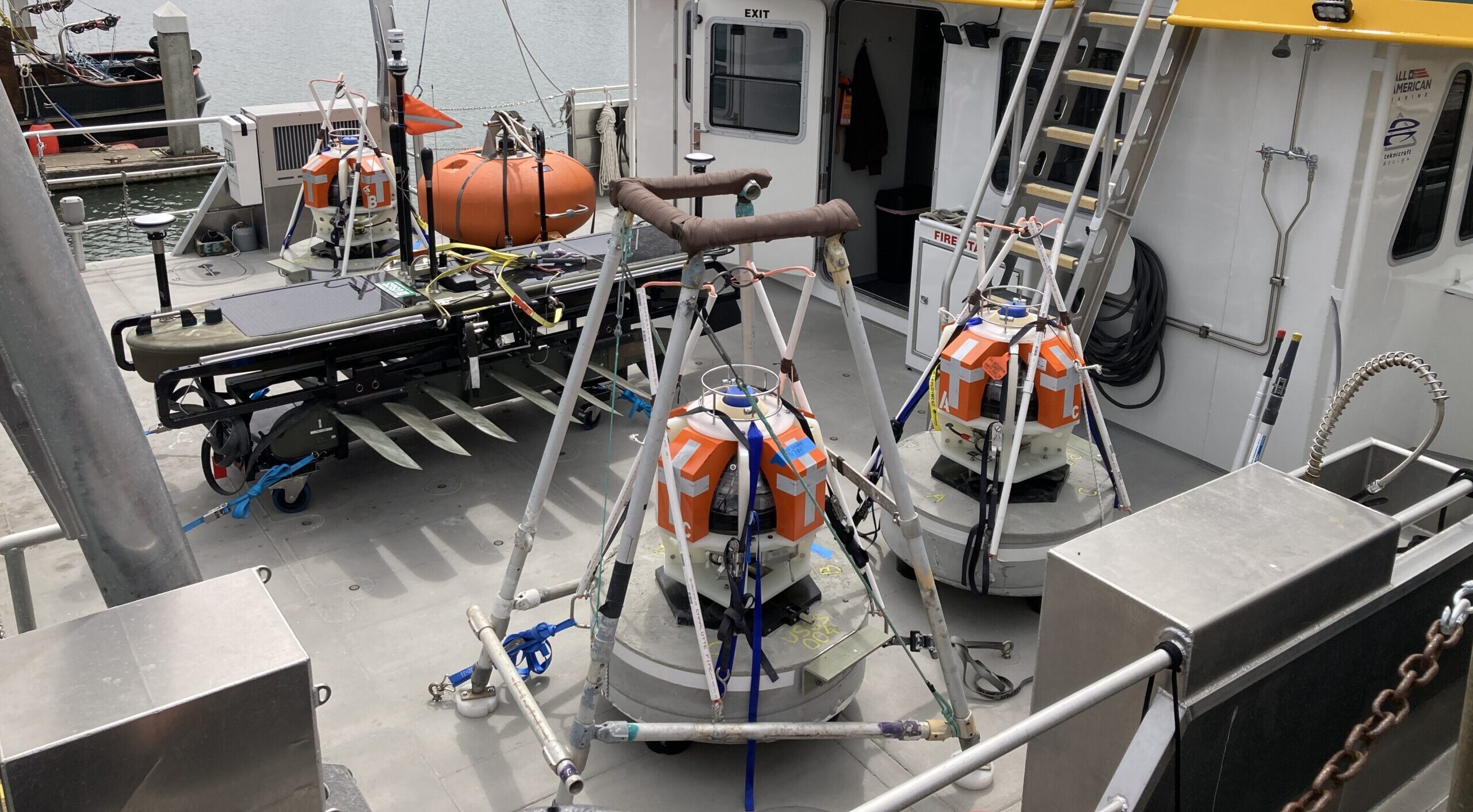
GNSS-A works by combining satellite positioning with underwater acoustics to track seafloor movement with centimetre-level accuracy. An uncrewed surface vessel (USV) with Sonardyne’s GNSS-A payload patrols above an array of Sonardyne Fetch transponders on the seabed.
Combining its known surface position with acoustic pulses down to each Fetch transponder allows it to calculate the precise position of each transponder – and therefore the position of the seabed it’s sitting on.
By repeating these measurements over time, scientists can track the movement of tectonic plates across faults to better understand and estimate earthquake and tsunami hazard.
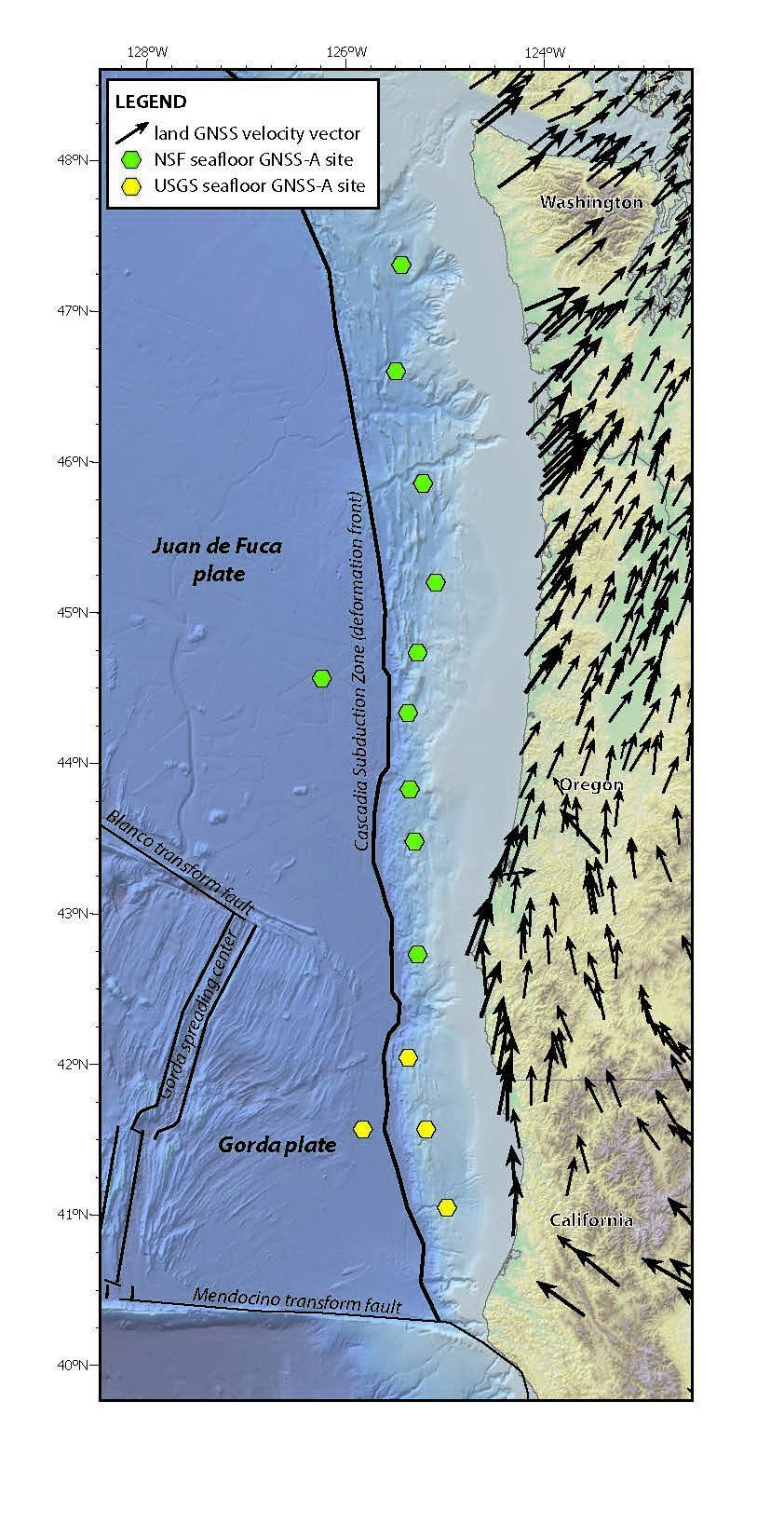
One of the organisations using this technique to monitor subduction zones, where one plate is sliding under another, is the USGS.
They first started exploring its use in 2017, working in collaboration with the University of Hawaii and Scripps, and using a Wave Glider and seabed sensors, in order to measure how friction between two tectonic plates restricts sliding and causes a build-up of stress – essentially measuring “how stuck are the plates”.
Since then, they’ve continued to contribute to the development of GNSS-A using Sonardyne GNSS-A modules and Fetch transponders.