Hunting for wrecks can be a challenging exercise, especially when only an approximate location is known and a wide area of seabed has to be searched. Even then, you need highly trained operators to interpret the sonar data and determine if a target is of interest or not.
A major reason for this is that, often, low frequency sonar systems are selected in order to achieve a wide swath. That means targets of interest can be missed because they just don’t offer the resolution needed. Selecting a sonar with a wide swath can also result in shorter deployments when using an autonomous or unmanned underwater vehicle (AUV/UUV), not because they cover larger areas but because they need more energy.
Wide swath, high resolution
One of the advantages of using our Solstice side scan sonar is that you get a 200 m swath at high frequency resulting in a high area coverage rate and resolution that’s so good even an untrained eye can determine if a target they’re looking at is the wreck you’re hunting for.
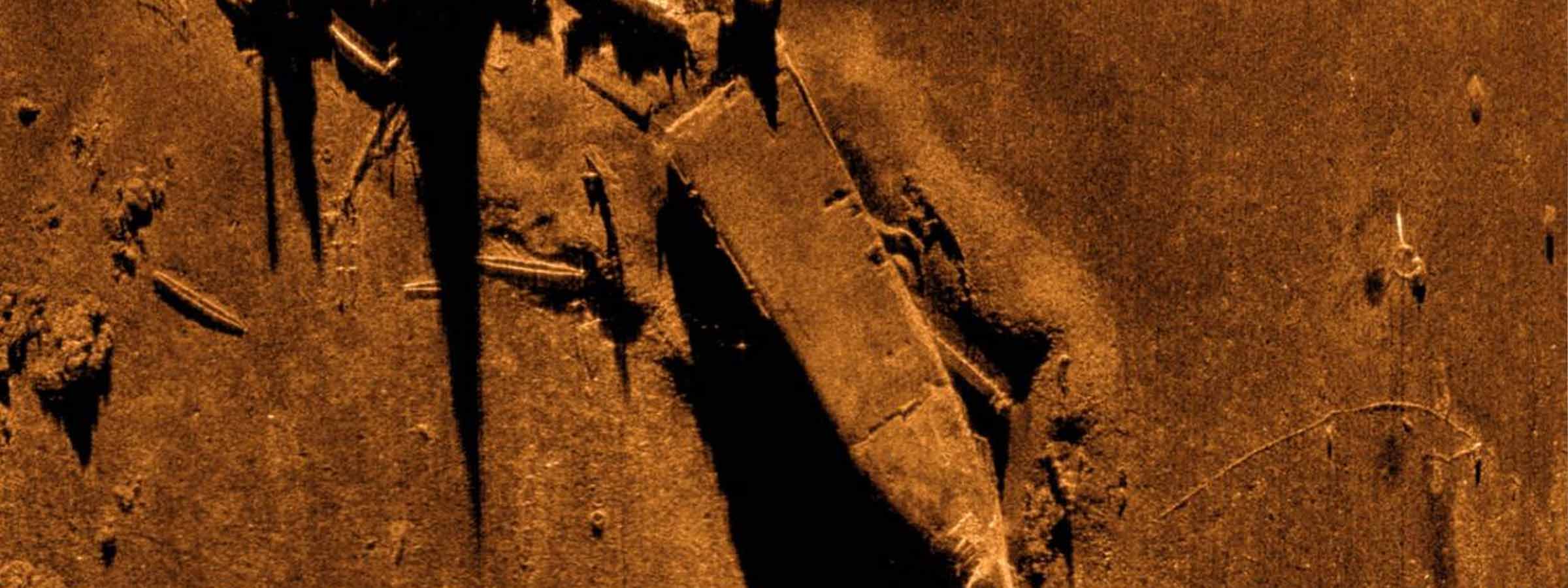
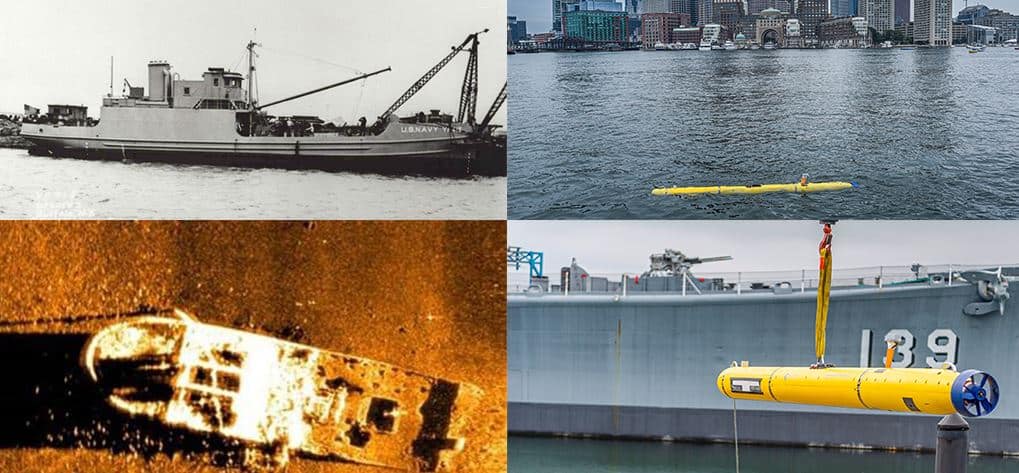
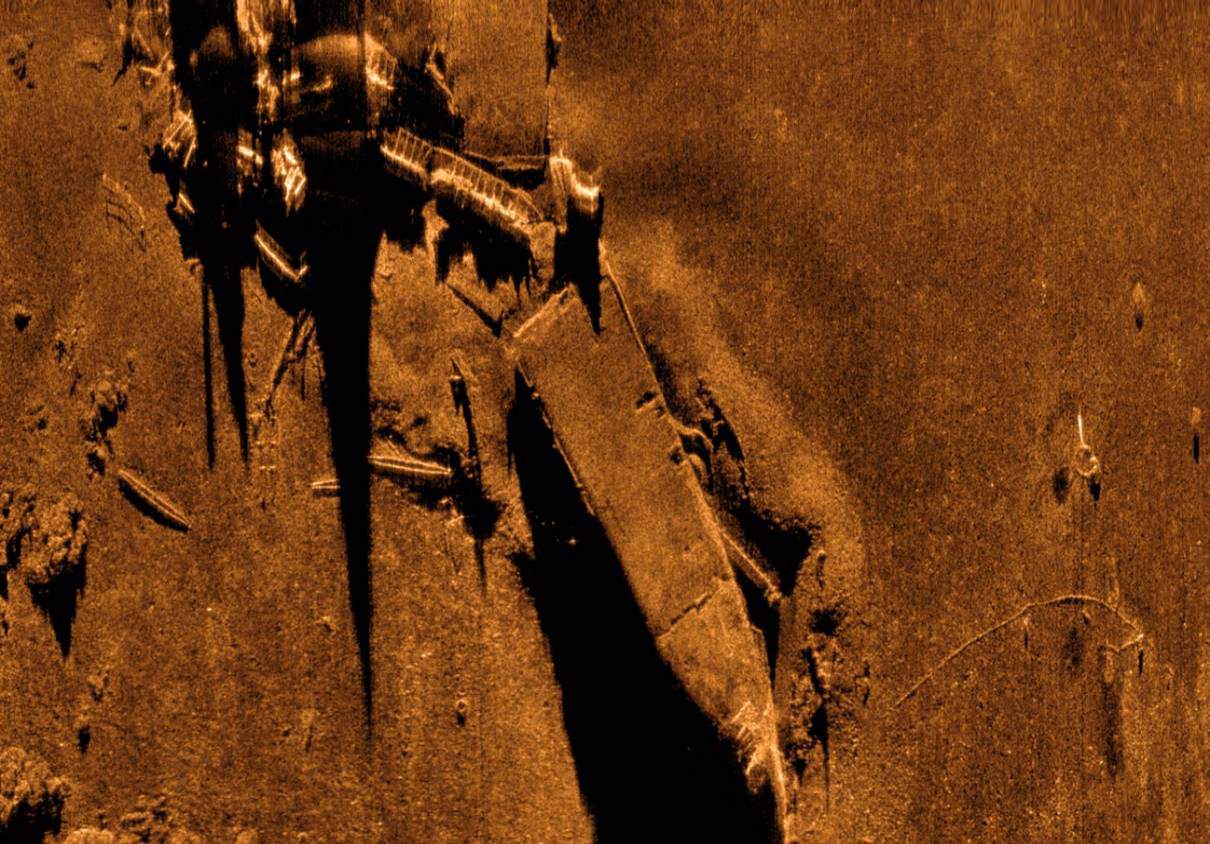
A General Dynamics demonstration using a Bluefin-12 UUV integrated with a Solstice MAS for the Royal Australian Navy (RAN) is a great example of this capability. During sea trials, as part of the RAN’s SEA 1778 Program to develop mine countermeasures, the Solstice data located the 1944 wreck of the USS YF-415.
General Dynamic’s Greg Jennings explains: “We initially found the USS YF-415 while performing acceptance testing with our SEA 1778 customers from Thales and the Royal Australian Navy. We were required to demonstrate the 24 hours endurance of the Bluefin-12 and chose to perform a large survey in an area where there were charted shipwrecks, in hopes of finding something interesting. When we came back to shore Monday evening and reviewed the data, I was stunned to find this beautifully intact wreck in a location where no wrecks were charted. The team was particularly excited about the find because we were really interested in capturing imagery of a shipwreck.”
In the following days, the team spent some more time logging the position of the wreck and searching other known wrecks in the area. It wasn’t until several weeks later, after Jordan Corbin, the Program Manager, contacted the Massachusetts Board of Marine Archeology, that they learned that it was the USS YF-415.
It was a sobering discovery. The USS YF-415, now resting in 240 ft water depth near Boston Harbor, was a type of barge used to transfer goods. In 1944, the vessel was conducting a routine obsolete ammunition dump when signal flares caught fire and ignited shells, leading to a series of explosions that sank the ship.
“The story really hit home for me because the ship had left dock just across the Back River from my home. It was quite sobering to learn of the tragedy behind the wreck. I hope that the families affected can find some solace in the beauty of the wreck. The imagery also shows large schools of fish surrounding the wreck, demonstrating how the sea has turned this gravestone into a monument to life.”
Side scan sonar for endurance UUVs
Solstice has been the multi-aperture sonar (MAS) of choice for General Dynamic’s Bluefin-12 since 2014 and is now also factory fit as standard on the Bluefin-9 as well.
The Bluefin-12’s offers long-range endurance, being able to run for 24 hours. The integration of our Solstice MAS, and on-board data processing features were key to the demonstration for the RAN. Its capabilities enable the Bluefin-12 to successfully provide ample mission-time and effective data collection and processing, yielding important information to help any team using it to assess and refine their mission. It also meant that the General Dynamics team were able to discover and enable the identification of the USS YF-415.
Ideal also for towfish
But while Solstice was initially designed for integration into UUVs, for wide area, high resolution mapping, whether that’s for survey, search and salvage, environmental monitoring or unexploded ordnance (UXO) survey operations, it’s also great from other platforms including towfish, as we demonstrated in a joint project with another Covelya Group company, EIVA. We trialled Solstice onboard EIVA’s ScanFish 3D remotely operated towed vehicle (ROTV), with great results, as you can see below.
With our SPRINT INS (inertial navigation system) onboard, and tracking using our Mini-Ranger 2 USBL system, it proved to be a real alternative to traditional synthetic aperture sonar (SAS) systems. Read more about the ScanFish 3D with Solstice here.
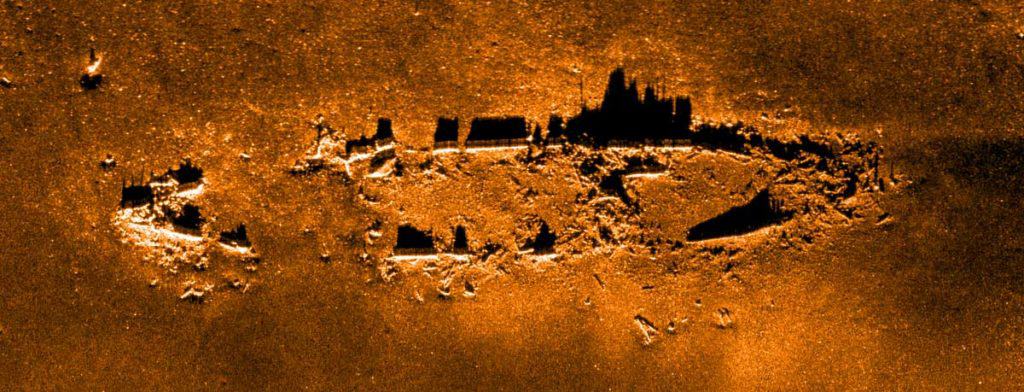
We’ve also deployed Solstice from our trials’ vessel, Echo Explorer. While not ideal – mounting the sonar from a vessel couples it to the sea surface, so it’s a harsh test – we’ve still gathered some superb imagery of wrecks, including the US liberty ship James Egan Layne, which was hit by a torpedo from a German U-boat near the Eddystone reef. Attempts were made to tow her ashore, but her stern collapsed causing her to sink.
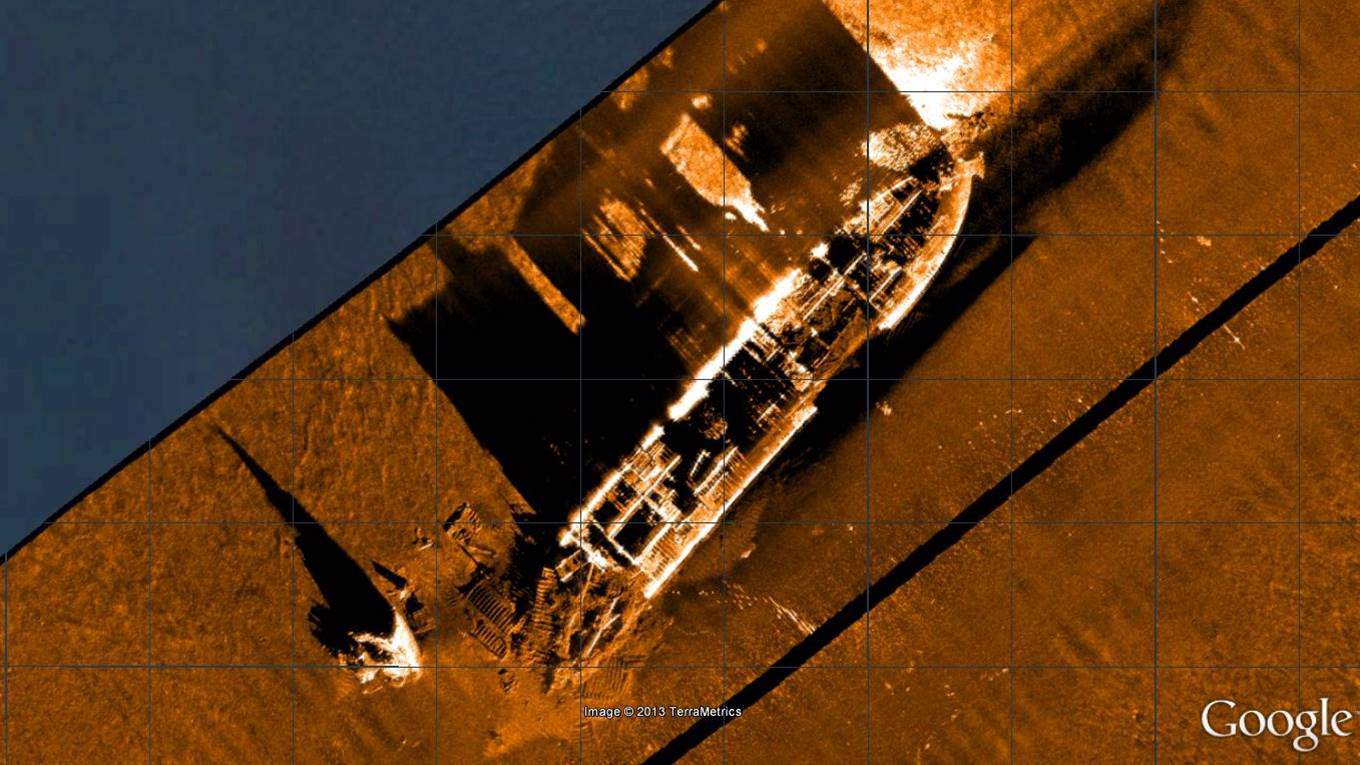
We also really like this imagery of the MV Fylrix, a general cargo ship which was towed and anchored in Jennycliff Bay, near Plymouth, after suffering severe listing, before eventually sinking. The vessel was irrecoverable and ended up being used for underwater explosives training. The image below was also generated using Solstice on a pole mount from Echo Explorer.
Get in touch with us to find out how Solstice can support greater coverage in higher resolution for your mission.