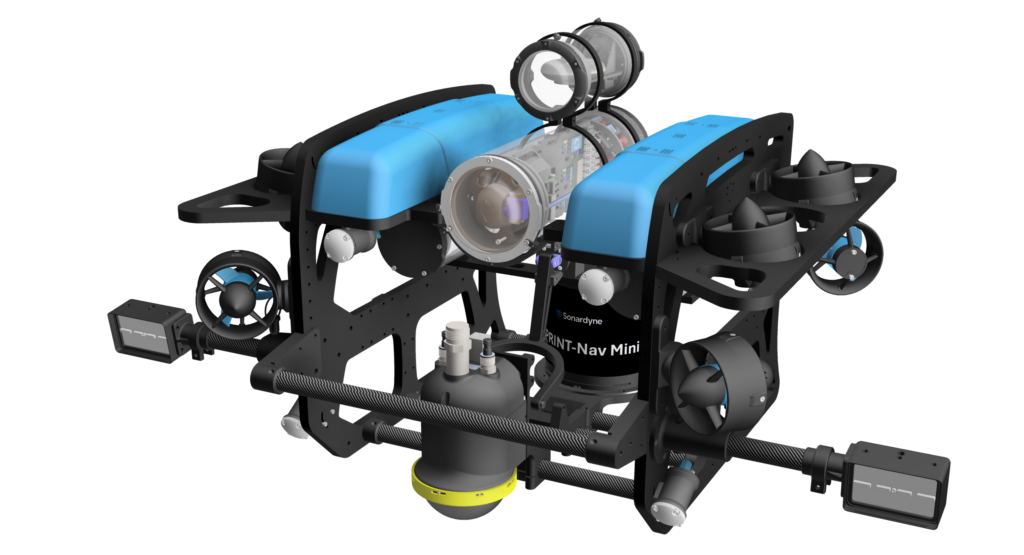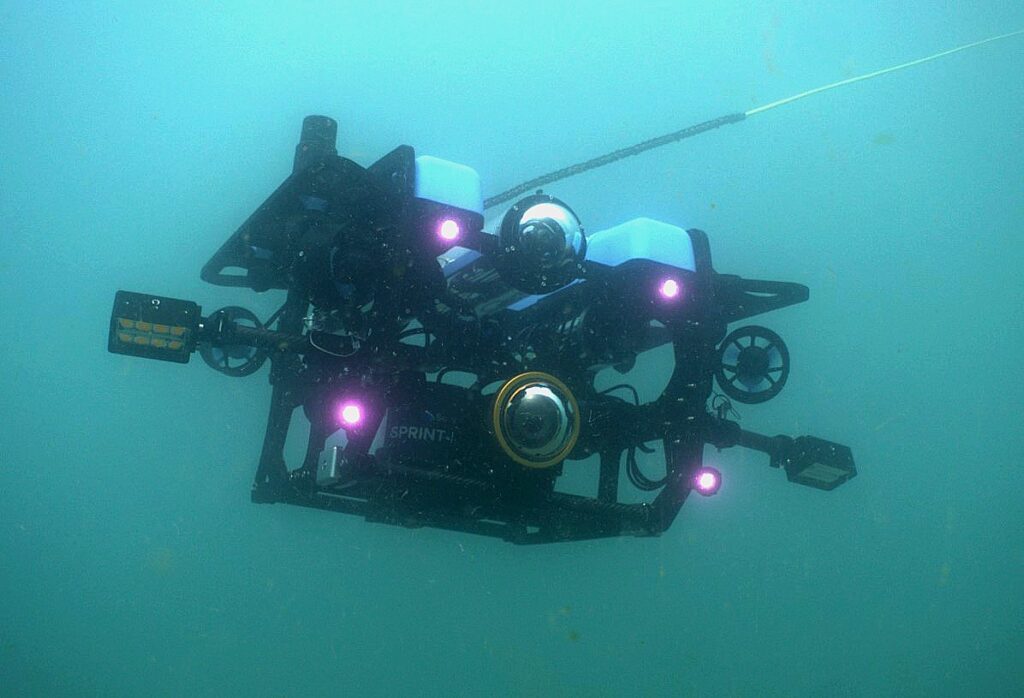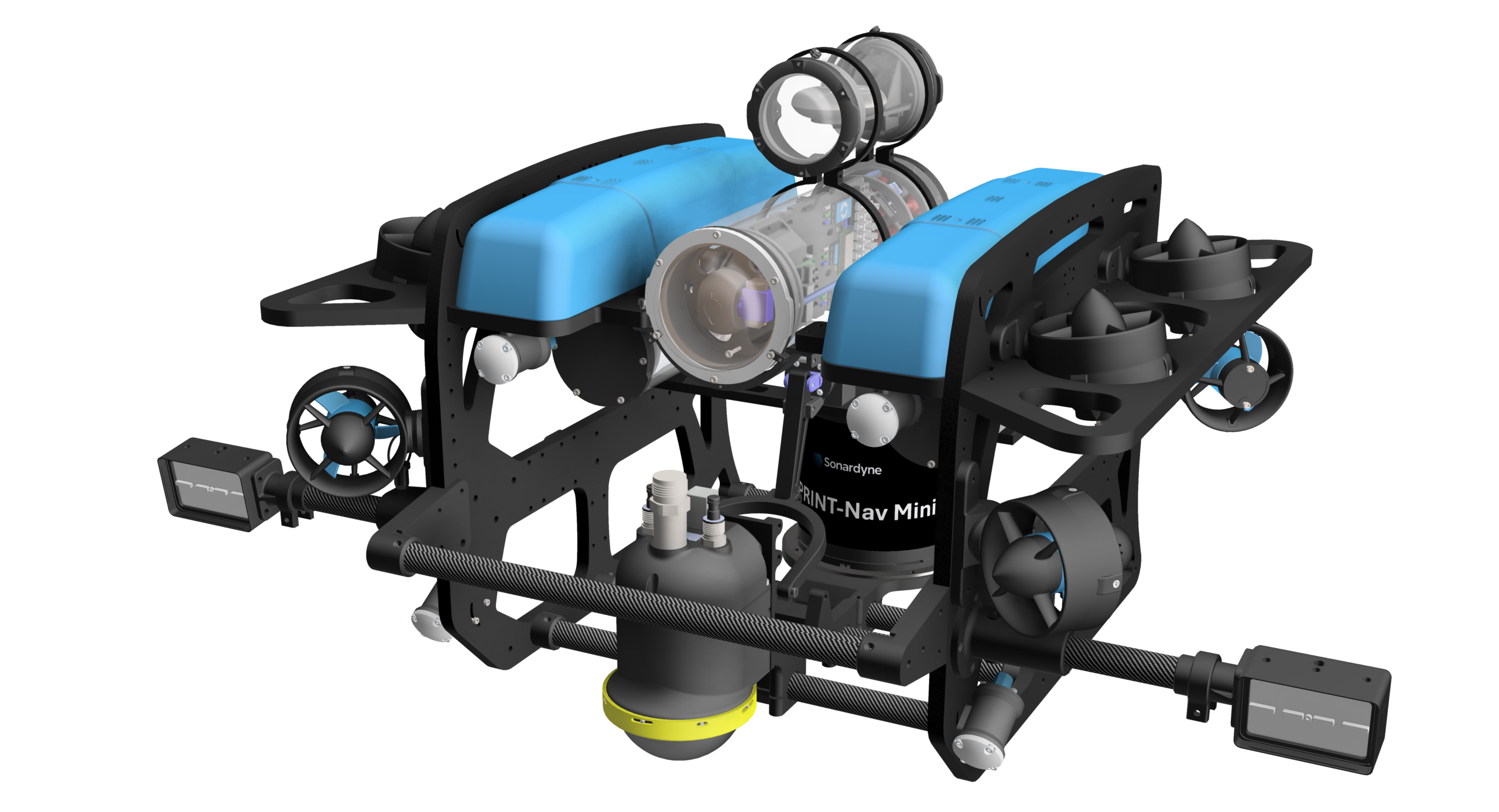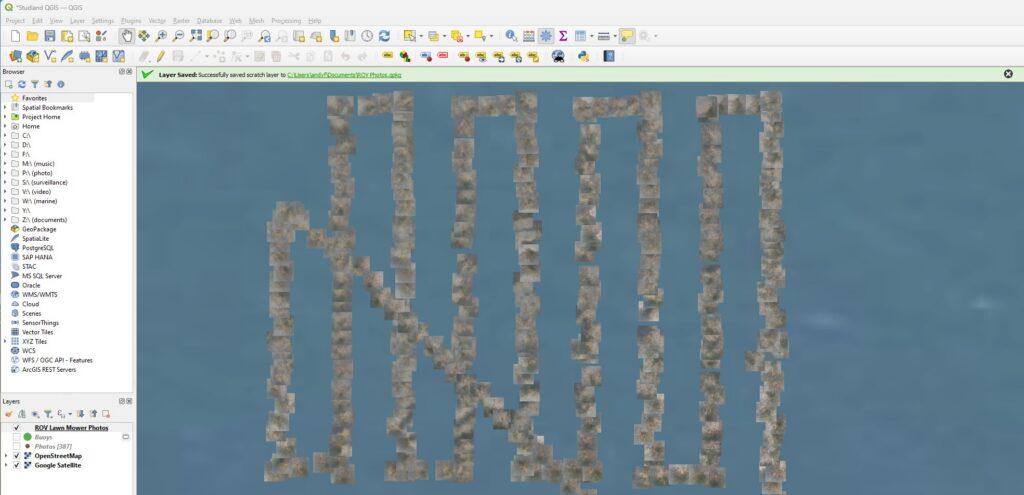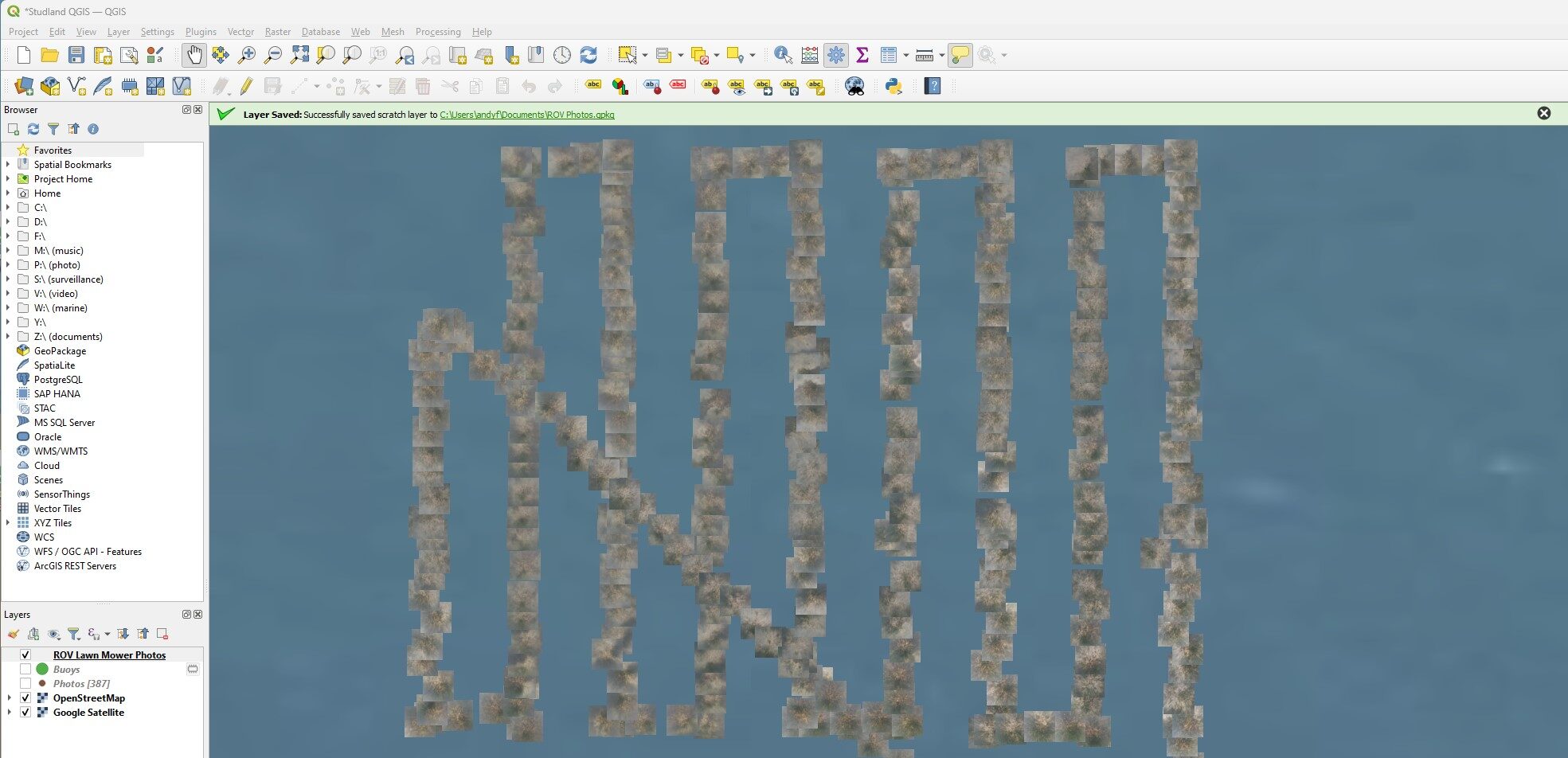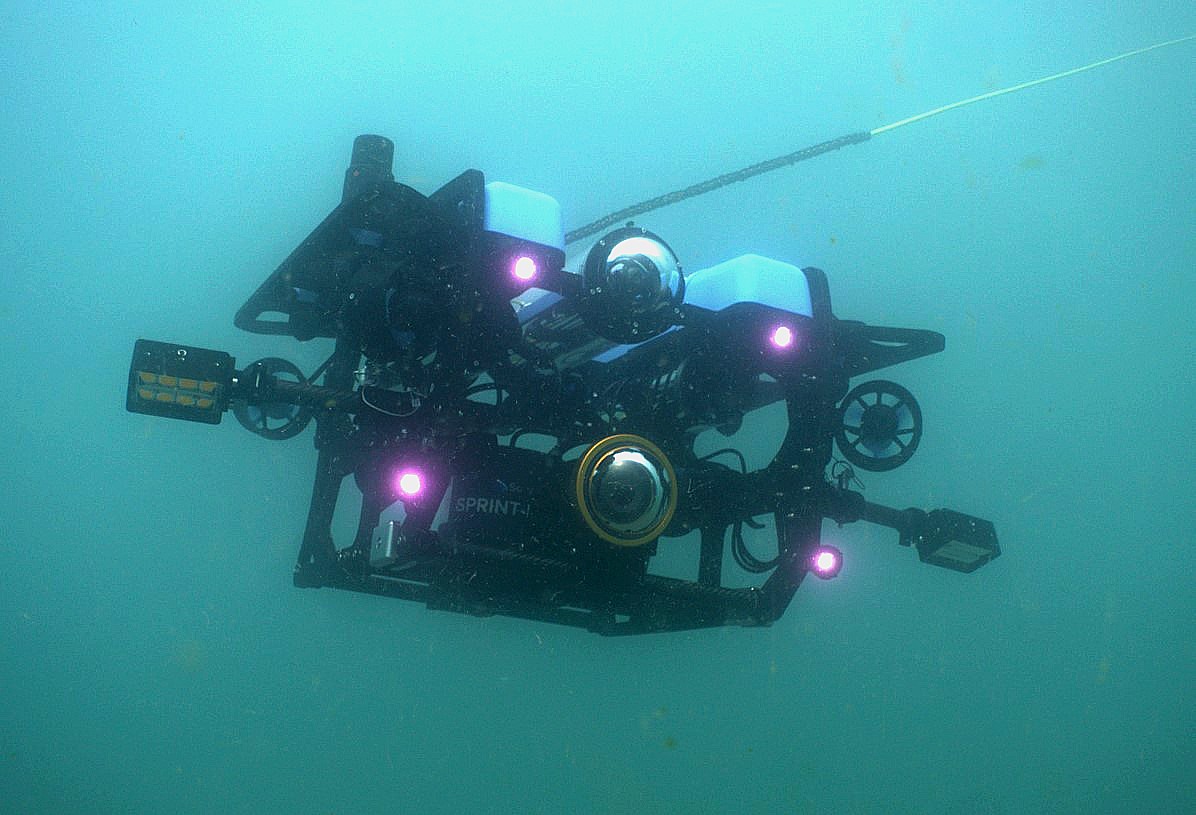
Knowing where seagrass is—and whether restoration is working—has been one of conservation’s biggest challenges. A purpose-built ROV developed through a unique collaboration with Sonardyne is now giving the Ocean Conservation Trust a clearer view below the surface, transforming how these habitats are monitored.
Beneath the surface of the UK’s coastal waters lies an unsung hero: seagrass meadows. These underwater habitats absorb carbon up to 35 times more efficiently than tropical rainforests and support vast marine life.
A single hectare can shelter 80,000 fish and 100 million small invertebrates, including rare species like seahorses and stalked jellyfish.
Yet seagrass is one of the fastest disappearing coastal habitats on Earth. In the UK, up to 90% of meadows have been lost to pollution, disease and physical damage. For the Ocean Conservation Trust (OCT), restoring these “Blue Meadows” is a race against time—made harder by the realities of working underwater.