A Fetch AZA instrument is mostly in one of two main states, which are (1) Transport Mode; and (2) Seabed Mode. This article describes what these modes are and when they should be used.
Transport mode is what it says – when the Fetch AZA is delivered from the factory, it will be in transport mode. It should be in this mode whenever the instrument is a) out of the water and b) not actually running.
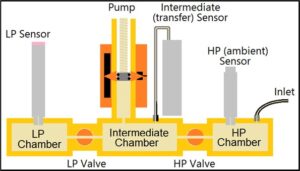
In transport mode, both valves within the AZA mechanism are open and all three pressure sensors are connected to the atmosphere outside the Fetch. This means that the low pressure reference sensor aka the zero pressure sensor will be protected against excess pressure caused by temperature extremes, such as strong sunlight. The Fetch AZA must NEVER be deployed while in transport mode, as the low pressure sensor will be destroyed by the pressure outside the sphere.
In seabed mode, the transfer (aka primary or intermediate) and ambient (high pressure) pressure sensors are both connected to the outside, while the low pressure sensor is sealed behind the low pressure valve. The Fetch AZA MUST be in Seabed Mode when it is deployed.