How it works
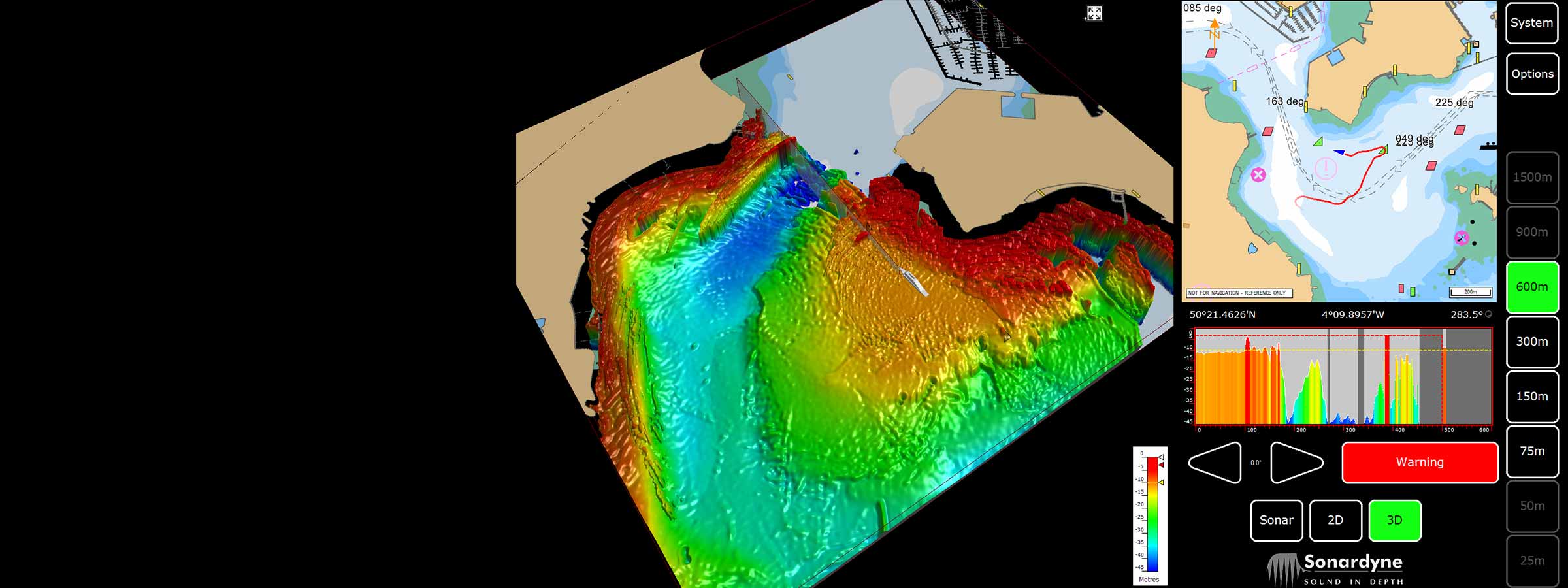
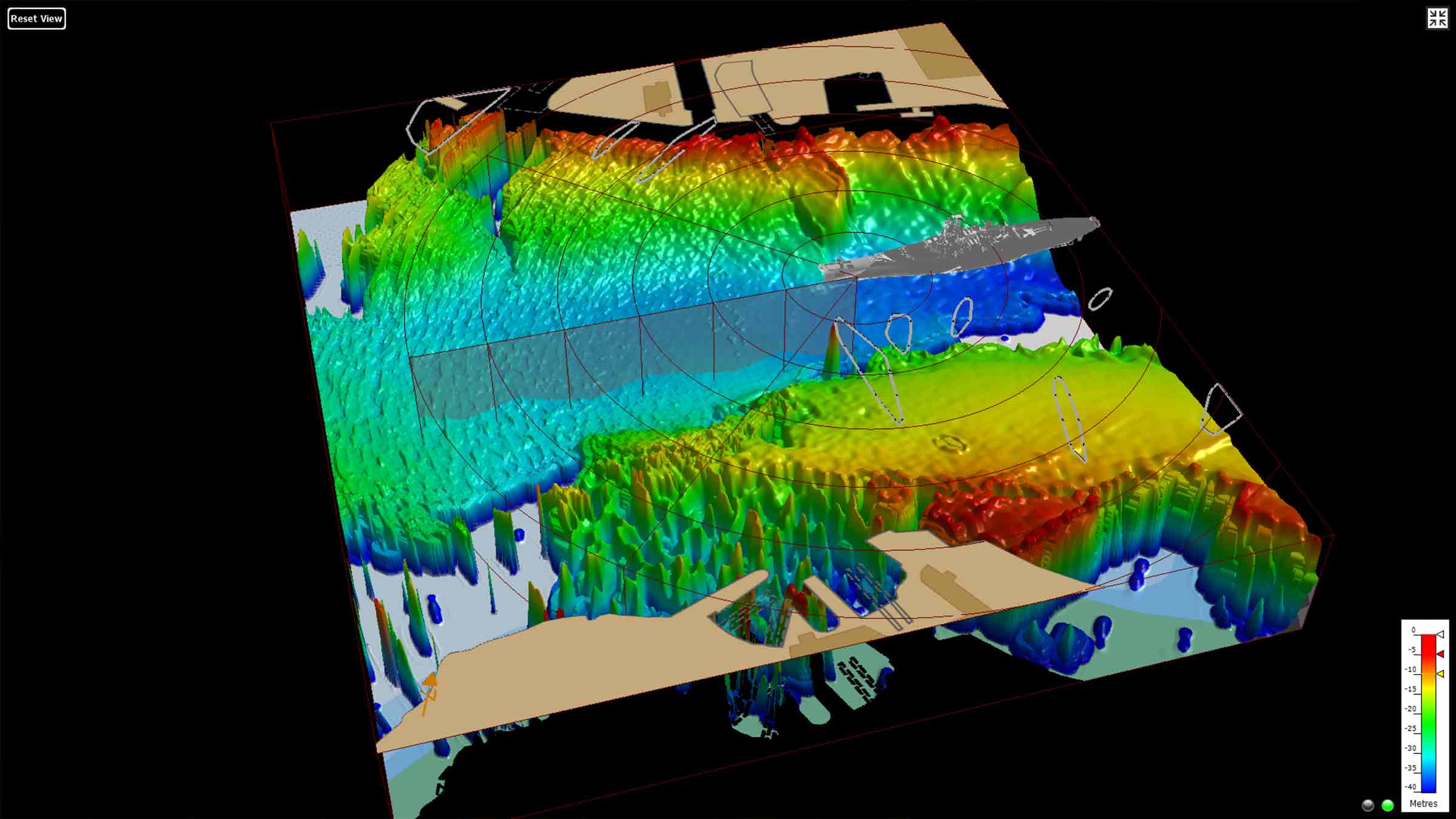
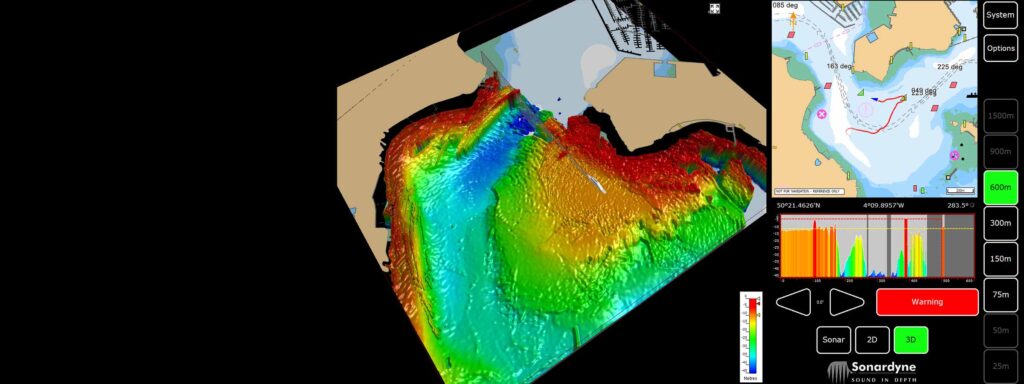
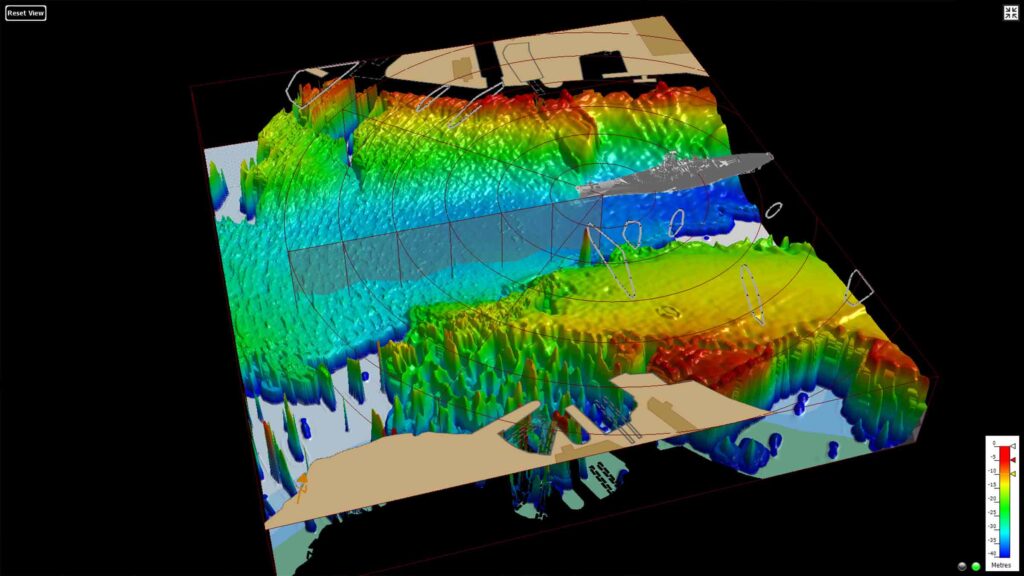
The system consists of a sophisticated sonar projector and receiver array mounted at the vessel’s bow, complemented by advanced bridge software. Its proprietary Altitude Confidence Filter (ACF) generates precise, colour-coded depth imagery, enabling crews to navigate challenging environments with confidence.
Seaborne collision avoidance is also a vital consideration for autonomous ships and an ever-increasing number of unmanned surface and underwater vessels in the offshore energy, ocean science and naval market sectors. Vigilant can be integrated into these autonomous platforms to provide essential information to autopilots and command and control systems, to aid safe navigation and manoeuvres around hazardous obstacles.
Vigilant has two principal operating modes, 3D mode and Sonar mode. 3D mode produces stunning 3D bathymetry and colour coded depth imagery using our proprietary Altitude Confidence Filter (ACF), out to 600 m and down to 100 m. Sonar mode processes the intensity of the acoustic data to extract long-range positional data out to 1.5 km and over a 120 degree field of view. In this mode, the sonar returns are used to generate alerts to the operator (or a third-party system) to the presence of a navigationally relevant obstacle.
For naval and security applications, Vigilant can be combined with Sentinel intruder detection systems, providing comprehensive underwater threat protection. Whether exploring secluded bays, navigating busy shipping lanes, or venturing into polar regions, Vigilant delivers unparalleled maritime intelligence and safety.
Comprehensive engineering support is available to ensure seamless installation and commissioning, making Vigilant your essential tool for modern marine operations.