As autonomous underwater vehicles (AUVs) achieve higher levels of autonomy, travel further and go deeper, it’s important that they maintain the ability to accurately determine their position, velocity and orientation without surface assistance. Navigating without any external aiding is the operating mode referred to as free-inertial. In this blog, we’ll explore the concept of free-inertial navigation for AUVs, the technology behind it and how Sonardyne’s SPRINT-Nav X enables vehicles to navigate unsupported for longer.
What do we mean by free-inertial navigation?
Free-inertial navigation refers to using an inertial measurement unit (IMU) to estimate position, velocity and orientation independently, without any other sensor measurements. In a subsea context, the inertial navigation system (INS) would normally function by fusing IMU data with velocity measurements from a Doppler velocity log (DVL) and position measurements from GPS on the surface, or acoustic positioning systems when submerged, to create an overall more accurate estimate of the vehicle’s state.
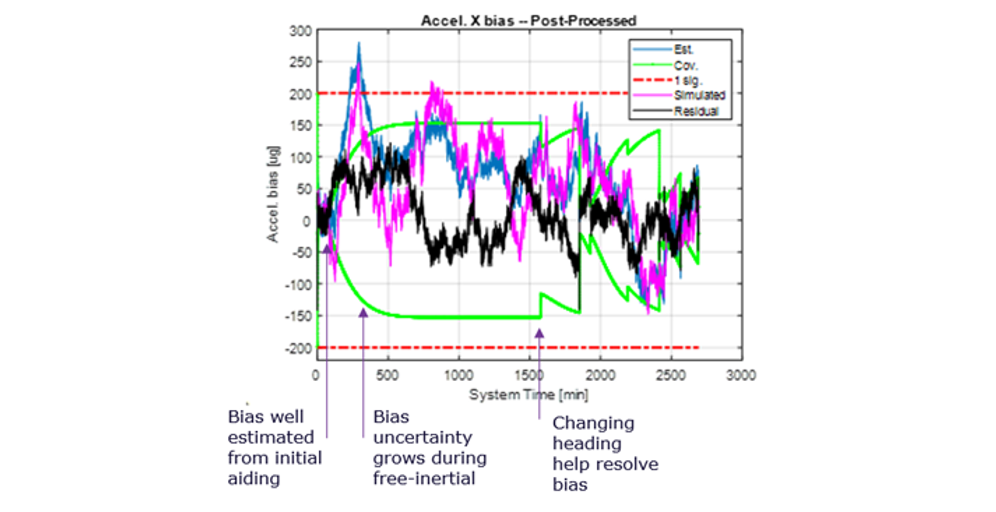
In free-inertial navigation the INS is only provided with IMU measurements; acceleration and angular rate, and so must accurately estimate the vehicles onward trajectory based solely on summing these measurements over time to calculate velocity and position. As such, free-inertial navigation performance is highly dependent on the quality of the IMU and navigation algorithms.
When do we need to rely on free-inertial navigation?
Free-inertial navigation is a common scenario subsea. GNSS signals are unable to penetrate water and, for AUV operations, acoustic positioning systems are limited by their operating range, the need for line-of-sight, and deployment costs. Additionally, for missions which include long transits, higher levels of autonomy or covert operations, acoustic positioning systems are impractical. The DVL is a very powerful sensor for subsea navigation but only generates velocity measurements when within ~300m range of the seabed. This gives two main scenarios where free-inertial navigation occurs:
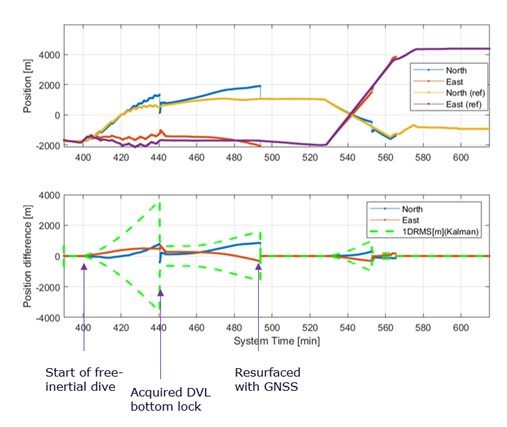
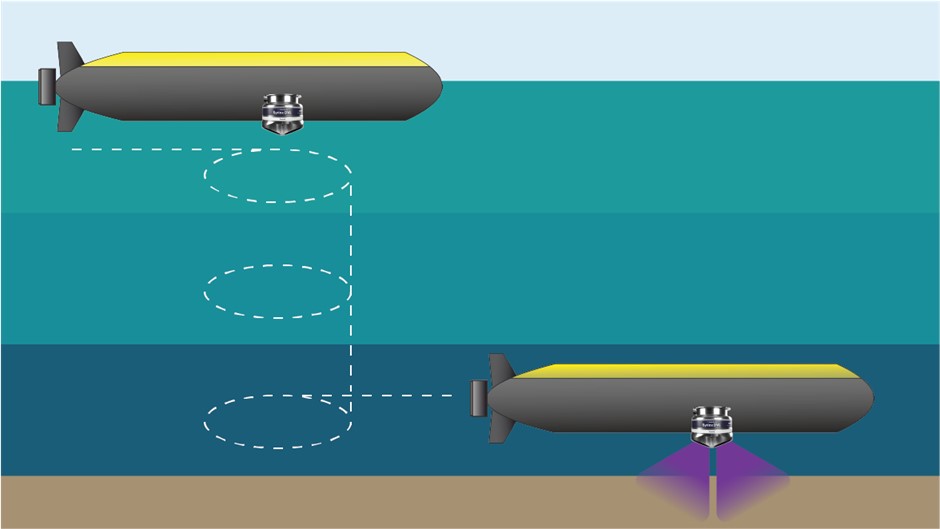
Diving – between the last GPS fix on the surface and diving down to within operating altitude of the DVL, an AUV would be unaided i.e. in free-inertial.
Mid-water column transit – AUVs wanting to travel longer distances submerged and out of DVL range.