The majority of the setup required for a Fetch AZA deployment is done before the instrument even enters the water. BUT once it has been deployed and it is on the seabed, there are a few final stages of setup that MUST be conducted using Subsea Array Manager (SAM) via the acoustic link.
When it comes to setting up a Fetch AZA instrument there are important tasks to be performed via the acoustic link with the instrument when it has been deployed and it is sitting on the seabed:
- Enter deployment limits. Go to the AZA tab in SAM and click ‘Advanced’. Enter the maximum deployment depth for your instrument, e.g. 3000, 6000 or 7000 m, click ‘Set Deployment Limits’ and then close. Note: the max deployment depth is limited by the rating of the sensor.
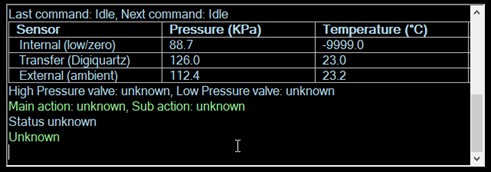
- Check pressure readings. Navigate to the AZA tab in SAM and click on ‘Get AZA status’.
- Start AZA logging. Simply click ‘Start AZA logging’ in the AZA tab of SAM. A big yellow tick indicates logging was successfully started. As a final check, you can confirm the AZA logging by selecting ‘Check Time and Logging’ in the Check tab.
- Retrieve an AZA logged record. It is good practice to retrieve at least one AZA logged record before leaving the site so you can inspect the data to know everything is set up and working. In the SAM ‘Retrieve’ tab, select ‘Get Bookmarks’, then ‘Retrieve’ and then ‘Export’ to generate a CSV file/files for assessment and visualisation of the data.
An important element of the data inspection is confirming AZA pressure readings went to zero (c. 100 kPa) and then back to ambient. Data from other sensors can also be inspected at this stage; for instance, if you are expecting PIES measurements, check PIES returns are measured.