

The solution
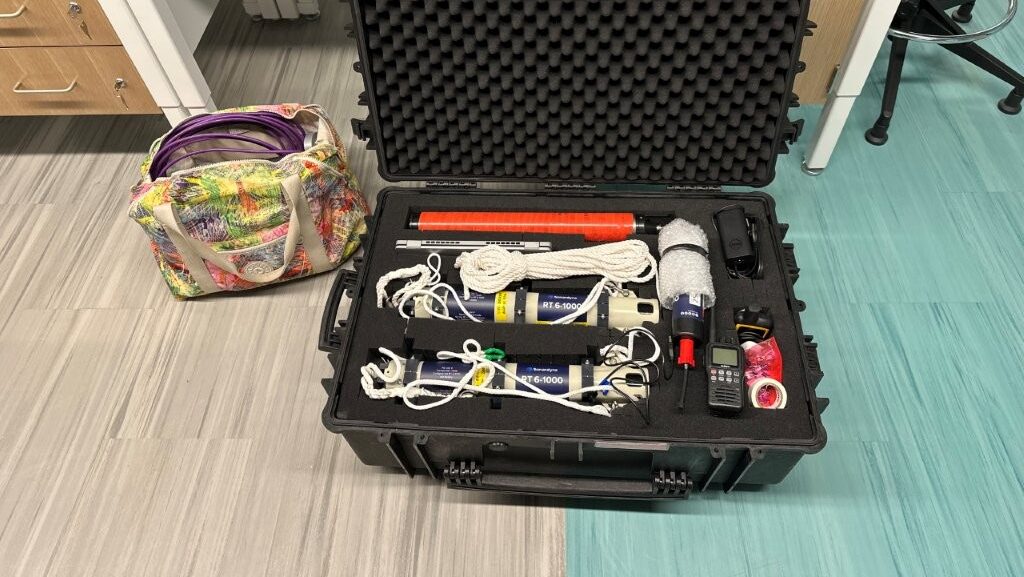
UNH selected Sonardyne RT 6‑1000 acoustic releases—the only way to safely moor long‑term acoustic instruments, without having any part of the system at the surface, in ice‑covered seas.
The RT 6‑1000 is our acoustic release transponder designed for seabed deployments, enabling users to deploy, track, locate and recover subsea equipment such as hydrophones, sensors and moorings.
- It’s compact, but built for use in harsh environments. That includes being corrosion resistant and rated down to 1,000 m water depth.
- It’s also able to support loads of up to 150 kg for periods of up to 13 months and, thanks to its inbuilt inclinometer, it’s easy to check loads have landed the right way up.
- It’s also easy to use, either with a deck topside unit, NFC mobile phone app or any Sonardyne Ranger 2 USBL system, when you want full tracking and release control.
- It can come with an optional rope canister, for raising tools, sensors or mooring lines as the device ascents, which can be useful in shallow or manual recovery environments.