Australian vessel operator Tenggara Explorer wanted to see if there was another way. Could DP-level control for ROV-follow capability be achieved on a non-DP class workboat?
Together, maritime autonomy and AI specialist Greenroom Robotics, ourselves and Unique Group equipped the 34 m-long Tenggara Explorer multipurpose vessel with integrated DP-level control and USBL for ROV-follow capability for their client’s medium-size inspection-class ROVs (with the capability to attach the Sonardyne transponder to any unit).
The Solution
The core of the solution was the integration of two key systems, Greenroom Robotics’ autonomy software, GAMA and our Mini-Ranger 2 USBL system.
Greenroom Robotics’ GAMA
GAMA is advanced autonomy software that is hardware agnostic and can be retrofitted to existing vessels to enable remote, hybrid and autonomous control.
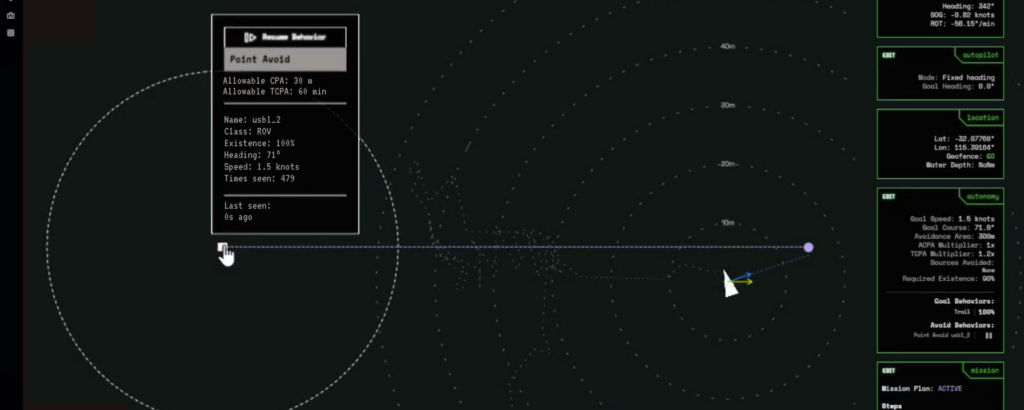
GAMA’s Dynamic Predictive Control (DP-C) independently controls thrusters, propellers and rudders using sensor feedback and control algorithms to counter wind, waves and current. This provides DP-level control to smaller more agile workboats, like Tenggara Explorer enabling precision positioning.
As a result, survey teams on smaller vessels can execute complex manoeuvres and survey patterns with high precision, at day rates around 80% less than a DP-class vessel, and with lower risk than manual precision control.