To do real-time SLAM, a new set of algorithms was developed using raw ranges from Compatt 6+ transponders in the SPRINT INS, which is in turn managed by Fusion 2, all in real-time. All you need is a ROVNav 6+ on your ROV, a SPRINT-Nav (or SPRINT INS and a DVL), and one Compatt 6+ transponder at a known or boxed-in location.
Starting at your known location, you then pilot your ROV on a SLAM trajectory, while ranging to the known location and to the Compatts required to be calibrated, to perform SLAM calibrations on each Compatt 6+ in turn – a routine that can be performed concurrently to your pre-lay survey. We have a white paper on what we have learned with regards how to perform SLAM calibrations which is available for people to use for working into their procedures. Just ask us if you’d like to see it.
In a brownfield location, where there are already known positions, and you are, for example, laying a new pipeline for a tie-back project into an existing asset, the SLAM process can be further optimised; put a Compatt at that known location and you’re ready to SLAM straight away, potentially no box-ins required.
Intuitive interface
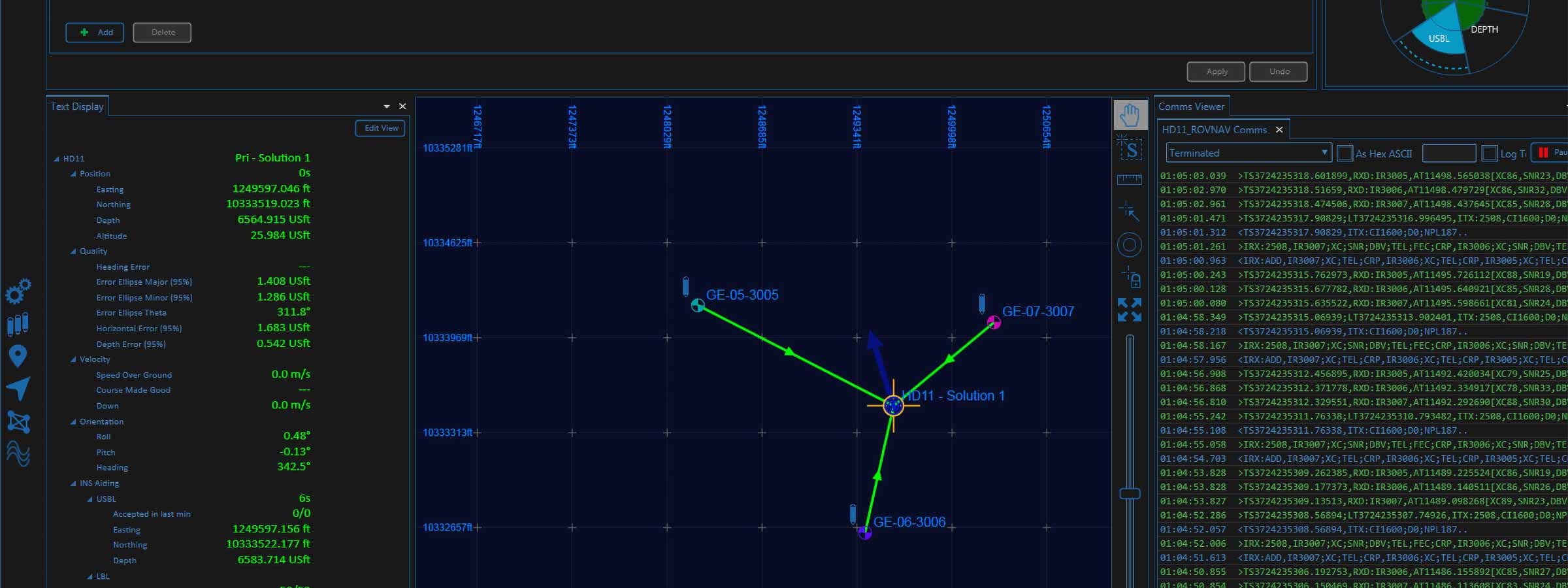
In Fusion 2, the real-time status of the calibration is displayed intuitively and as soon as the SLAM calibration meets your accuracy criteria the calibration can be finished, and you are straight into tracking. There are no delays due to post processing.
This is still just the start of the journey. We continue to evaluate the scope there is to re-think and simplify survey tasks by taking advantage of SPRINT INS-aided operations in Fusion 2.
We’ve been improving structure positioning by including acoustic heading into the tracking. We’ve also now released a wireless structure deflection monitoring module that can be run in Fusion 2 and we already have Fast-LBL, enabling up to two-second update rates of structures being tracking in full LBL arrays with sensor data – depth, sound velocity, pitch, roll and heading – being streamed wirelessly at the same time.
Rethinking your operations
By looking at your operation differently, you can also do more. For example, at the moment, you cannot track a mobile Compatt on a structure within a sparse array, as you haven’t got a SPRINT INS on it. But, instead you can dock an ROV with our SPRINT INS* onboard onto a structure whilst you track that in sparse LBL mode during installation. Or why not track an ROV in sparse LBL mode, install sand bags as visual markers to mark the structure landing area, and, knowing the markers are installed correctly, position the structure visually?
It’s going back to basics but it works. As Mike Clark mentions in our blog here, a lot of how we operate is restricted due to operator specifications. They say we must have a positioning transponder on the structure to land it, but why?
Remote training for Fusion 2
Want to learn more? If you’re trained in Fusion 1, all you need is a one day top up course to be able to be up and running with Fusion 2. We’re now offering these remotely, on a one-to-one basis, so you can complete the training where ever you are in the world, at home or offshore.
We’ll cover the theory, go through demonstrations and then give you remote access to the software to try it for yourself and run through a host of scenarios to make sure you’re comfortable with your new skills.
Contact our Training Team at [email protected] for more details or watch our video on real-time SLAM calibration here:
*It will also work when your ROV has our SPRINT-Nav 300, 500 or 700 onboard.