The technology
The fleet-level autonomy engine developed by Royal Holloway, University of London served as the mission’s central nervous system, making real-time decisions and replanning when necessary due to factors such as inaccurate mission execution, vehicle faults, changes in the operating environment or the addition and removal of stations. The division of labour enabled by this approach showed significant promise in productivity gains made possible by robotics and AI.
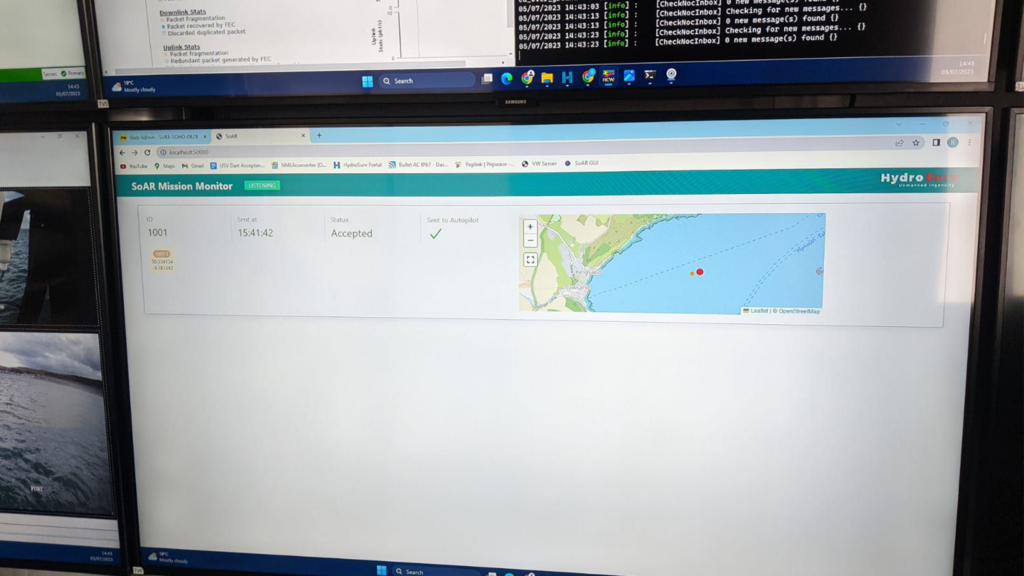
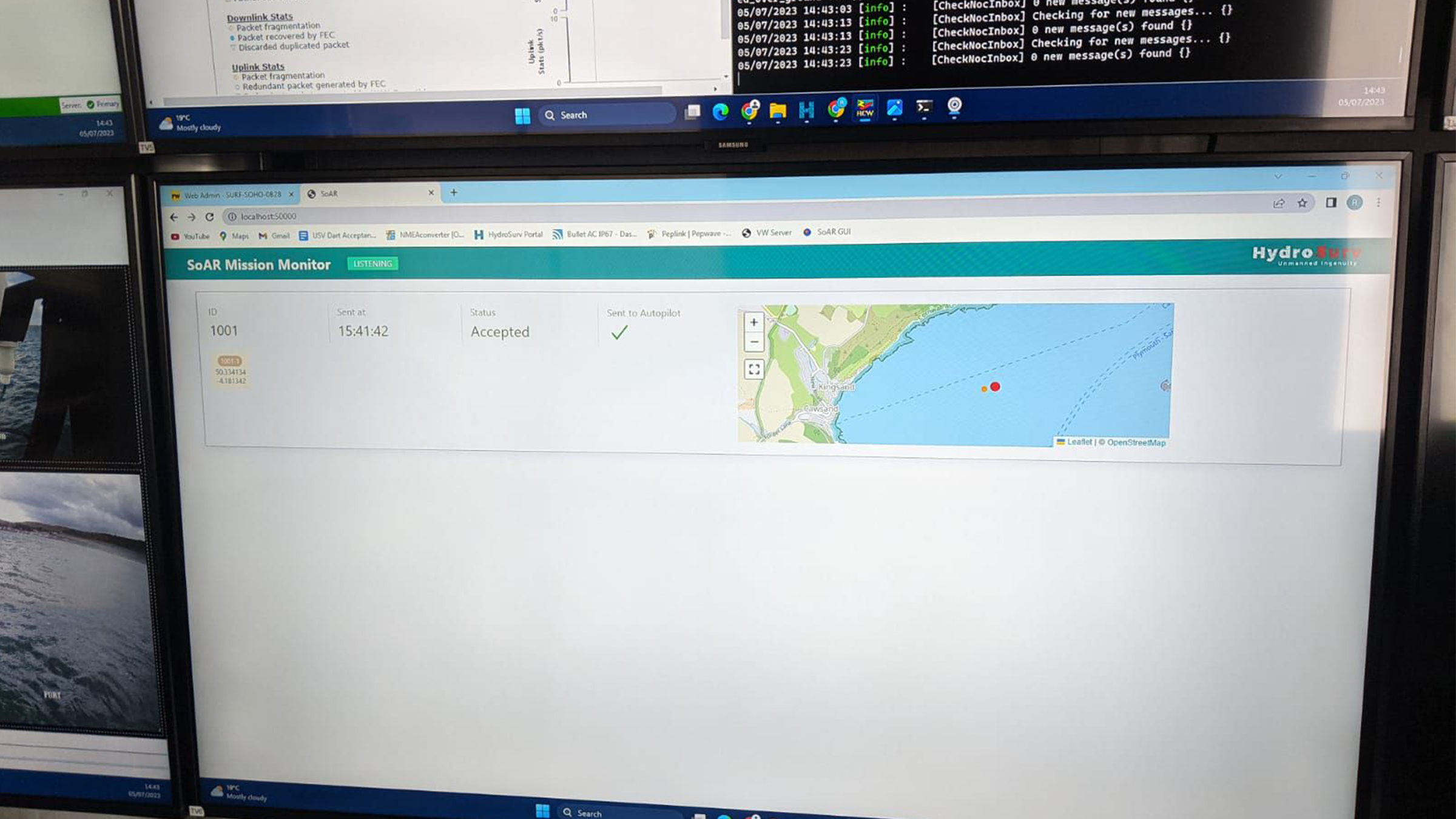
The SoAR Communications Backbone, developed and released by the team at the NOC, acted as a central messaging system which enabled interoperability between the fleet-level autonomy engine, each vehicle-specific command and control system and any other sub-system requiring bi-directional communication. This was key to allowing the seamless introduction of different platforms and sub-systems in diverse combinations to suit a wide range of mission objectives.
We provided inter-medium communications via our AvTrak 6 Nano acoustic transceivers fitted to each AUV. This enabled simultaneous USBL tracking via a surface vessel and robust telemetry for AUV-to-vessel and AUV-to-AUV communications.
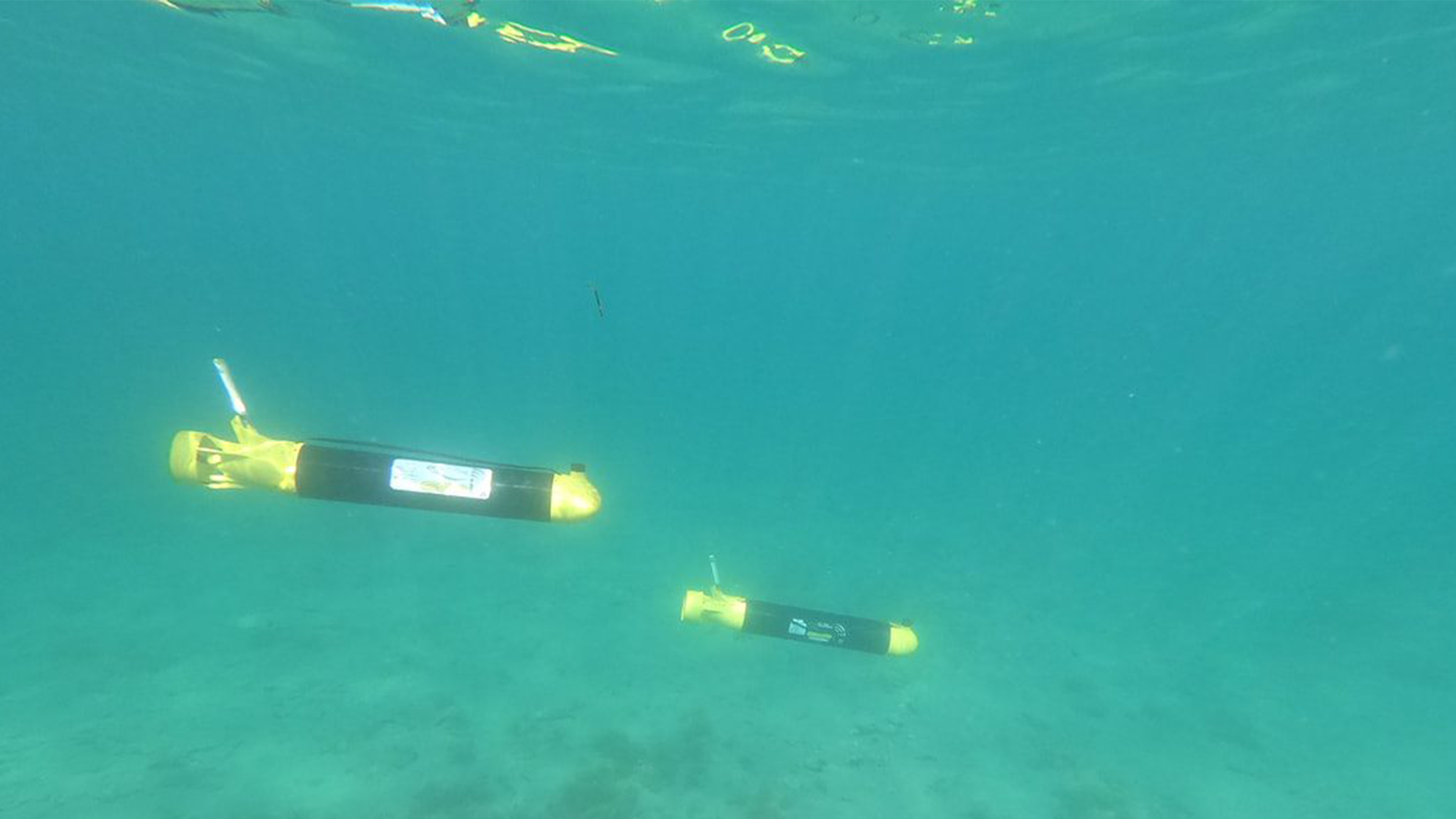
A small swarm of four ecoSUB AUVs, each fitted with an AvTrak 6 Nano acoustic transceiver, played a crucial role in rapidly assessing the underwater environment and conducting preliminary evaluations to identify targets of interest.
An Auto-Hover 1 (AH1) AUV, owned and operated by NOC, capable of exceptional precision in maintaining station and navigating vertically within the water column, and fitted with an AvTrak transceiver, was dedicated to close inspection tasks, enabling intricate and comprehensive examination of identified targets.
Our HydroSurv REAV-60 uncrewed surface vessel ‘Decibel’ assumed a pivotal role, serving as a crucial communications gateway to and from the AUV swarm. It was fitted with an HPT 3000 transceiver and ran our well-established Ranger-2 software on its topside, facilitating inter-medium communication and providing navigation support to the AUVs. Decibel was also equipped with various communications devices including 4G/LTE and Iridium satellite communication systems to enable communications between subsea, surface and the Autonomy Engine.
The deployed SoAR fleet was managed and controlled from HydroSurv’s shore-based Remote Operations Centre in Exeter, using 4G/LTE and Iridium communications.