
Since we launched SPRINT-Nav in 2015, the benefits of not just bolting together, but tightly coupling an inertial navigation system (INS) and Doppler velocity log (DVL), with a pressure sensor, have been clearly demonstrated. The result is a pre-calibrated and easy to install instrument (no more offset calculations!) with greater capabilities than the sum of its parts.
The benefits are obvious. The result is that SPRINT-Nav has become a navigation instrument of choice for many underwater vehicle platforms around the globe. Not only that, it’s also now supporting uncrewed surface vessel (USV) navigation. While SPRINT-Nav was designed for underwater vehicle navigation (because they can’t access GNSS signals), it’s also able to provide the same data – tightly integrated INS and bottom track – as an additional navigation source to USVs to ensure they always know where they are. This is especially useful for USVs working in areas where GNSS signal could be compromised and for surveys needing the highest accuracy. This is possible because SPRINT-Nav contains our Syrinx DVL. Beam level data from Syrinx is used by SPRINT within the instrument as it continuously computes its position.
Adding acoustic Doppler current profiling (ADCP) to the mix
But why stop there? We’ve now also introduced acoustic Doppler current profiler (ADCP) capability to SPRINT-Nav and we’ve extended the altitude at which both the DVL and ADCP can work. That means that underwater vehicles and USVs now have a greater operational envelope for navigation and can also measure water currents – at the same time.
SPRINT‑Nav can continue to use bottom‑tracking data from the Syrinx to compute its position, exactly as before. The bottom‑tracking acoustics, which rely on signals bouncing off the seafloor, can now be alternated with ADCP signals, which bounce off particles in the water. The ADCP returns are known as backscatter, and by measuring these we can figure out the water speed at different depths beneath the SPRINT-Nav – the current profile. What’s more, because the SPRINT-Nav also contains an INS, it’s able to compensate the ADCP data for vessel motion, even if you do not have bottom lock from the DVL.
ADCP data has multiple applications. The water velocity data can be kept and used to monitor, for example, current regimes for tidal energy projects, deep ocean currents, or currents around wind farms, to predict or monitor scouring. Since SPRINT‑Nav is vessel‑mounted, the instrument can be deployed to locations where ADCP data is needed, instead of relying on static seabed or buoy mounted ADCPs. However you are using your SPRINT-Nav ADCP, its PD0 data is logged and can also be streamed to another application.
Taking tracking and ADCP profiling to a higher level
Our standard 600 kHz Syrinx DVL can bottom track down to 175 m and the ADCP works down to 80 m. Integrated into SPRINT-Nav, the same performance applies. We recognised that many USVs might want to track deeper waters than this, so we’ve extended the range with a 400 kHz DVL with ADCP capability. That takes the DVL range to more than 200 m and the ADCP to 120 m. Integrate that into SPRINT-Nav and you have our new high altitude SPRINT-Nav variant. Late last year, we took this instrument for a spin in some Scottish waters known for a wide range of tidal and current environments, including tidal falls and whirlpools. We’re really pleased with the results, from being able to see marine mammals and their wakes to eddies created by waterflow as well as haloclines in the data.
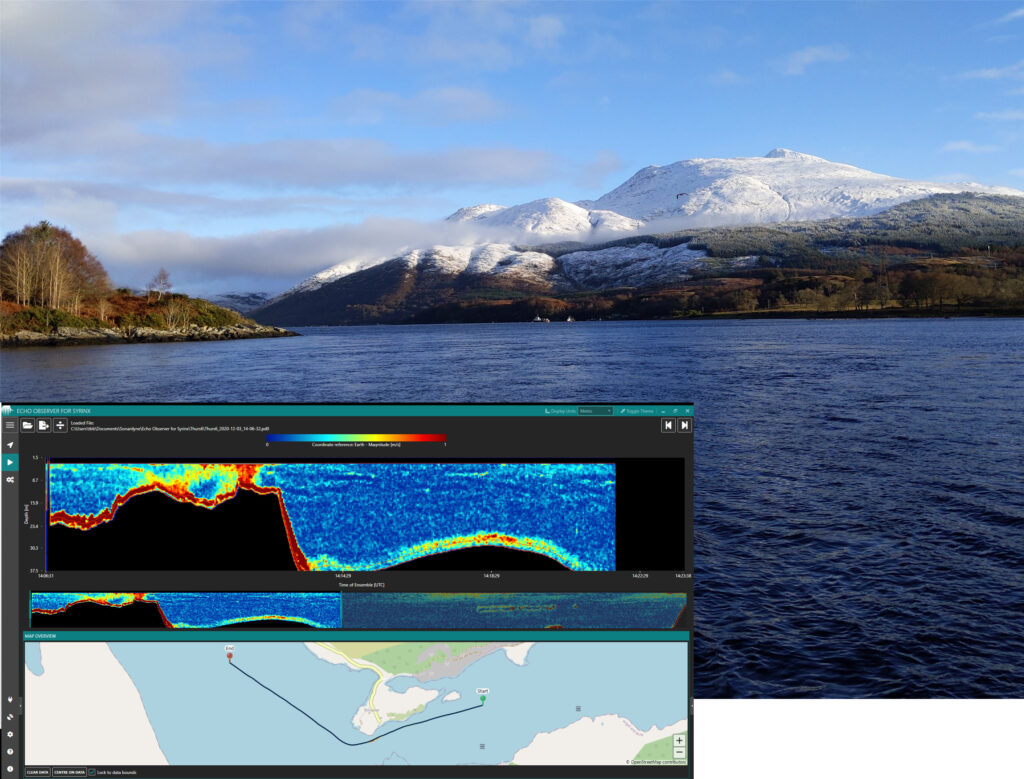
We toured a number of locations around Connel Bridge, the Firth of Lorn, Sound of Mull and into Loch Etive, where we had the stunning backdrop of Ben Cruachan – as you can see above.
We transited through deep water (~210 m) and high tidal flow rates (~5 knts), undertook transects across rivers, through fresh-salt water boundaries and went through calm protected waters with an abundant of marine life. Throughout, a wide range of water velocity components were measured and visualised in real-time waterfall plots using our Echo Observer software. You can see an example of a waterfall plot above and we’ll show you more below.
Dedicated ADCP software
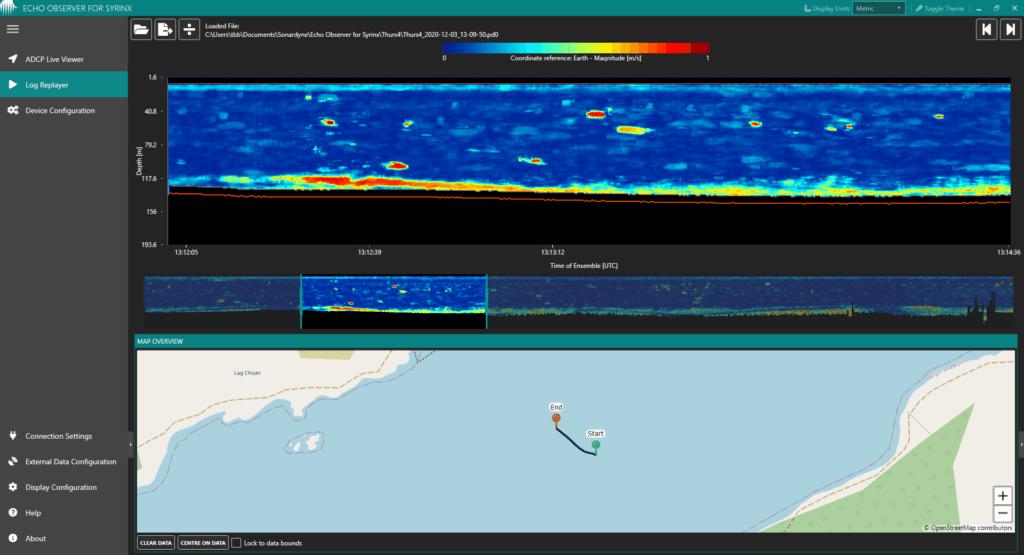
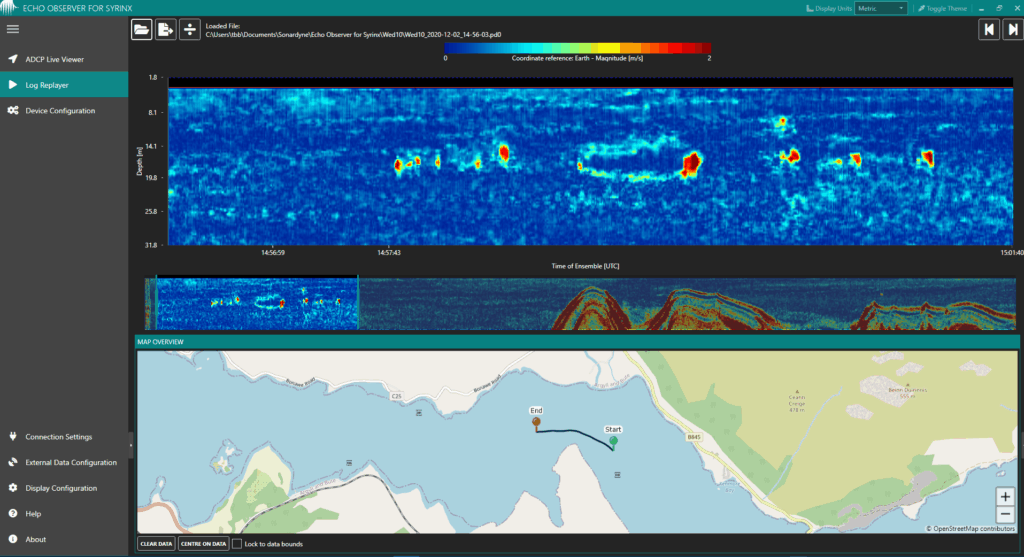
Our ADCP software, Echo Observer, lets users flick easily between different waterfall plots of the different velocity components, i.e. north, east and upwards, as well as velocity magnitude. The real-time plot, higher resolution snippets can also be shown simultaneously, if users want to focus on a particular element of the plot. It offers great spatial awareness – you can see what locations you’ve already visited and how they relate to the where you are currently. You can zoom in (the main viewing window), track back in the data (the plot below) and see the features and landforms you’re going past (the navigation chart), as shown in the image above and that you will see in our other screen shots below. This visualisation is possible in real-time, where the more detailed snippet is the most recent set of data, or later when you’re inspecting the data and you want to view a specific snippet.
Integrated INS compensation for ADCP data
Imagine you are capturing ADCP profiles from a moving vessel in deep water. You can’t bottom track due to the high altitude above the seabed, so how do you account for the vessel speed in your ADCP data? Can the INS in SPRINT-Nav provide vessel velocity estimates in place of bottom track velocities? We tried this out by turning off bottom‑tracking in SPRINT‑Nav and did transects over 120 m of water, but only profiled the first 100 m.
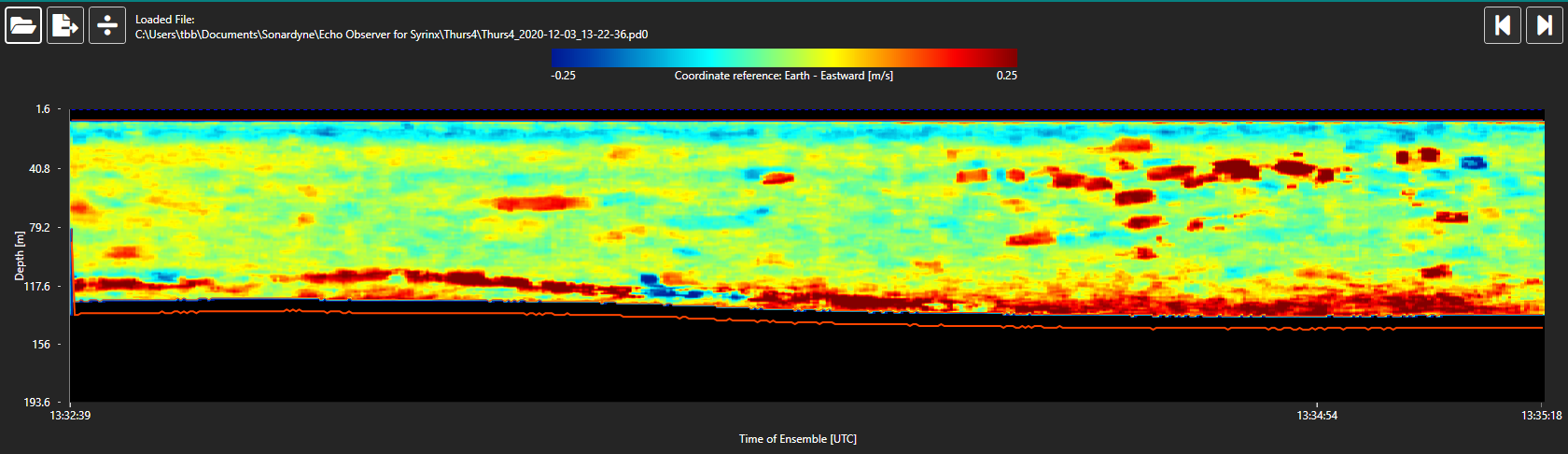
The waterfall plots in both images below, taken from Echo Observer, show eastwards velocity, with the Y-axis representing depth increasing from top to bottom, the X axis is time.
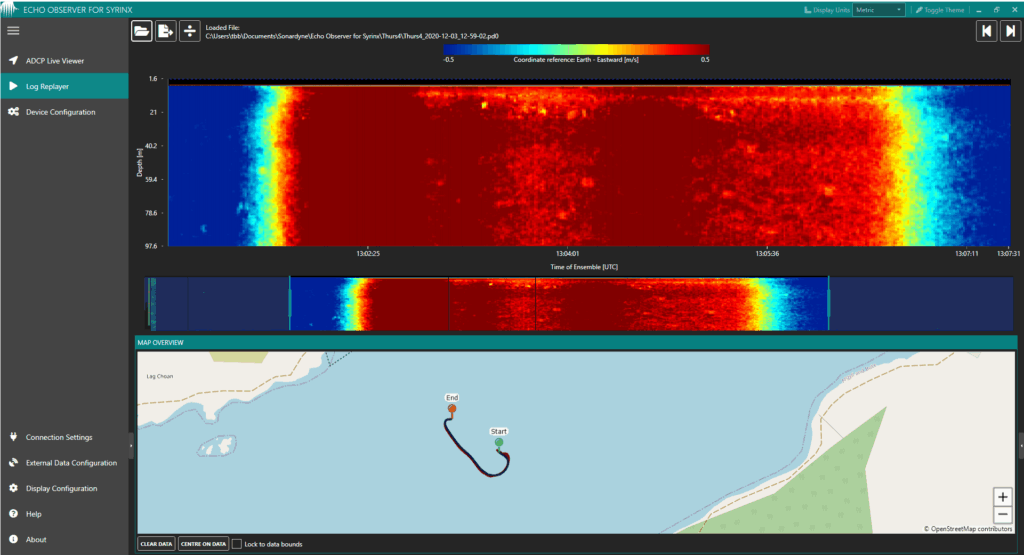
This plot shows the ADCP data without any compensation for vessel velocity.

This plot shows the ADCP data compensated for vessel motion by velocities obtained from the INS. It’s the equivalent to what you would get if you were bottom tracking. The benefit of INS compensation is immediately obvious.
With just the INS compensation we can clearly see fresh water at the surface moving slightly westerly (bright turquoise) while the main body of the water is moving gently eastwards (yellow) with items in the water – moving strongly westerly (blue) and some moving strongly to the east (orange-red). In the plot on the left (without INS compensation), these details are largely obscured by the vessel motion – strongly easterly (deep red). The difference is dramatic.
To recap, ADCPs measure the direction and velocity of water at many depths – the current profile. But if you’re doing that from a vessel you need to be able to remove the vessel speed. Typically, this can be done using DVL velocity, but when bottom lock is unavailable or unreliable, then the INS provides exceptional compensation.
Supporting USV operations in deeper waters
Because of the tight integration of the INS and DVL in SPRINT-Nav, we’re able to gather ADCP data down to 120 m and remove the vessel motion, so you can view the water movement with or without bottom tracking. This could be beneficial for a USV operator working in 300 m, where they can’t achieve bottom lock and still want to know water speed, or where the seabed is moving, such as in the mouth of an estuary.
Something fishy below the waves
After testing out how the world looks with and without INS aiding, we started to look at other features in the water, through our various components. For example, the plot below shows east‑west velocity, again clearly showing the top section of fresh water moving in a different direction to the main body of denser salt water below. But we can also see fish in the water – these are the discrete ‘blobs’ that stand out from the overall water flow.
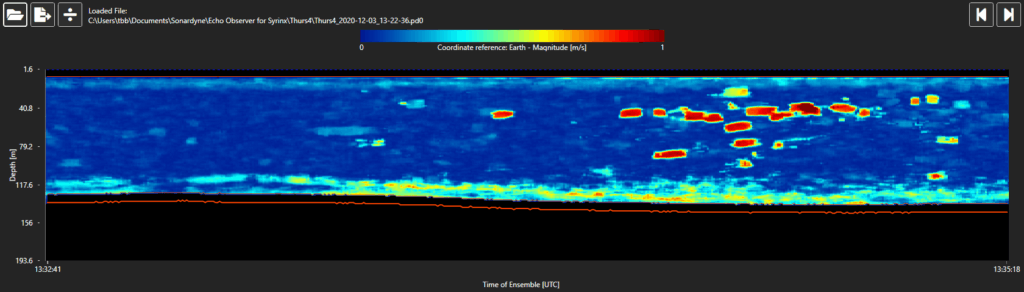
Next, we looked at the same transit, but in velocity magnitude. Again, in the plot below, we can see the fish, and also the halocline – the change in salinity with depth. The halocline is represented by the thin, lower salinity layer (light blue) near the surface and the much thicker layer (dark blue) below, corresponding to higher salinity water. These layers appear in a plot of velocity magnitude because the layers are travelling at different speeds.
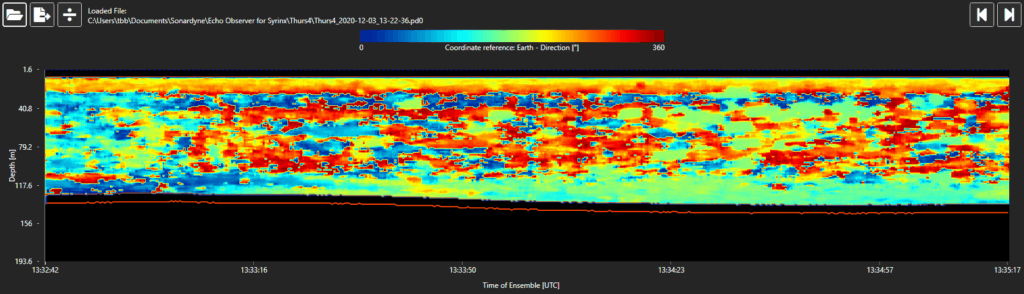
Finally, we switched to a waterfall plot of velocity direction, which highlights the shear between the fresh-saltwater boundary. In this plot (below), the upper layer is flowing west (270°, orange), while the lower layer is flowing approximately west (90°, blue).
Whirlpool imaging
A phenomenon we were keen to observe, and which is very much visible close to Connel Bridge, as you can see in the photo below, is a whirlpool. But while they’re easily visible on the surface, what’s happening beneath the surface? ADCP data is a great way to have a look and we did.
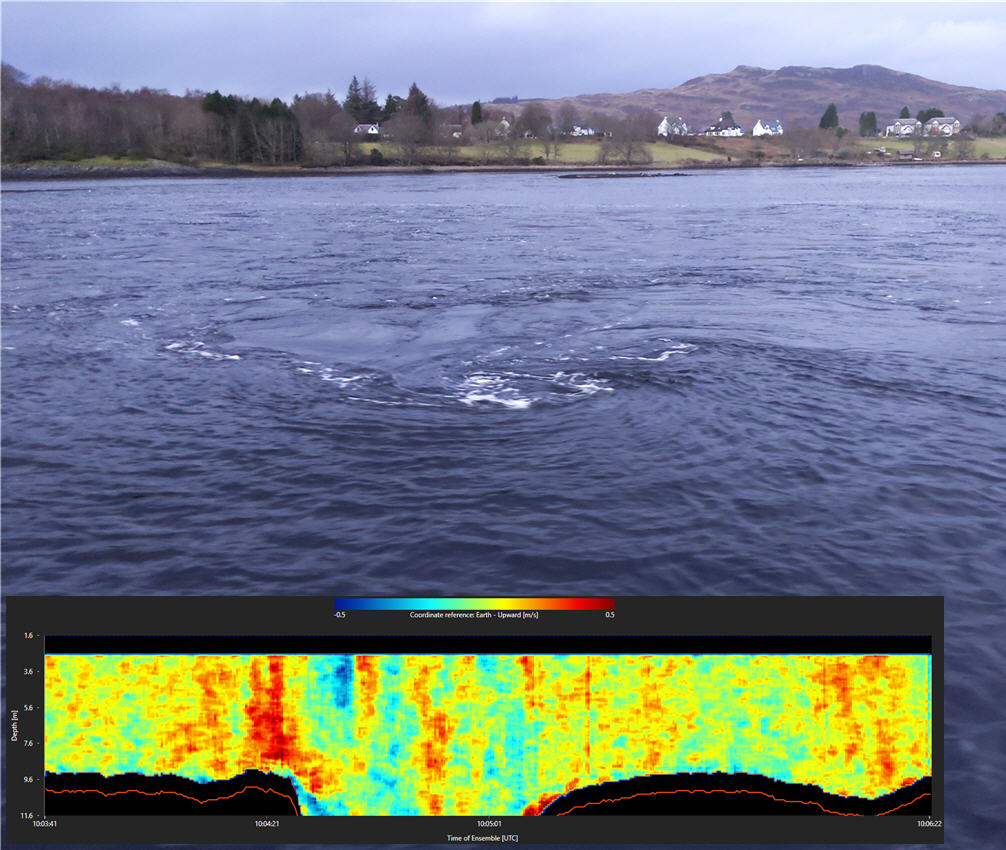
In this waterfall plot within Echo Observer, we’re looking at upward velocity, with red indicating strong upward velocity and blue indicating the opposite, i.e. downwards. This clearly shows the eddies throughout the ~9 m deep water column in this area across the vessel track. In this example, SPRINT‑Nav was configured to alternate DVL and ADCP pings, allowing us to use the bottom‑track data to compensate the ADCP for vessel speed. While we were on deck, we could view this phenomenon on the surface, but also the effects below the surface in Echo Observer, which also showed us the data alongside our vessel position. It was fascinating to watch all of these elements at the same time as we moved over the eddies!
What’s more, as well as the real-time waterfall plots, the data can also be viewed in 2D line graphs, which combine all components of the ADCP data, such as north, east and upwards in earth frame. Echo Observer also allows the data to be exported from the PD0 binary format into a CSV file so it’s easy to use in applications like MATLAB for further analysis.
Going in deep
A key part of our trials was testing the ADCP at depth. The plot below shows water velocity magnitude. The dark blue indicates still or slack water, with a slightly higher speed shown at the surface in a lighter blue. Fish and marine mammals can also be seen in the water as individual ‘blobs’ in red-orange, depending on their speed. And as shown in the plot below, the DVL’s bottom track was locked at about 120 m, as indicated by the red line, and the ADCP profile was also measured to that same depth. The red area just above the seabed is an artefact of the ADCP signals interacting with the seabed.
Viewing the fresh/saltwater boundary
As we travelled around, we often saw the waterfall plot indicating some water traveling eastwards and some west, shown below with red indicating a strong eastward velocity and blue the opposite, i.e. west. This plot, below, is from an area about 38 m deep, where bottom track from the DVL is shown in the red line.
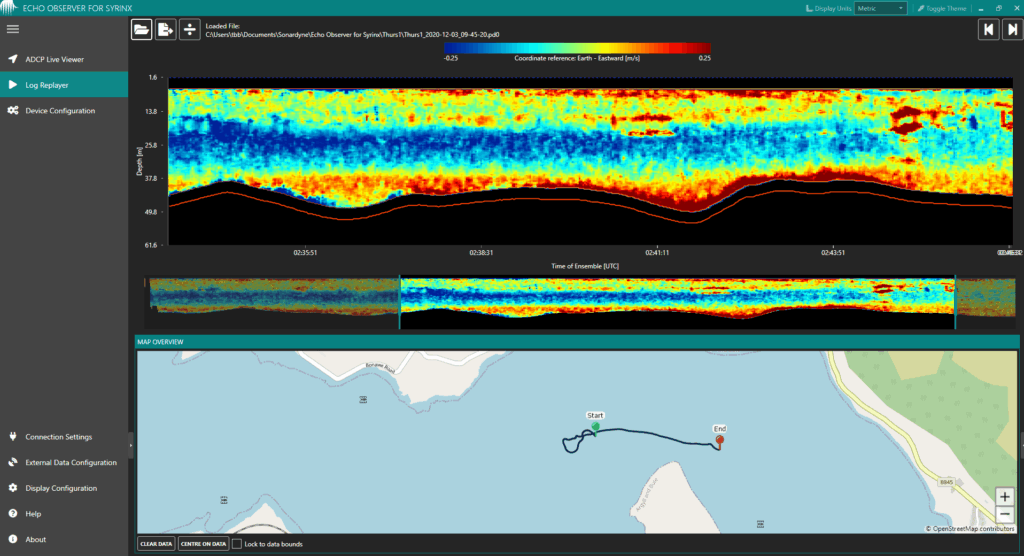
The plot shows a ~15 m deep layer of water moving west at about 0.25m/sec, in blue-green, and above it another ~10 m deep layer of water moving east, at about 0.2m/sec, in yellow-red. This indicated a freshwater‑saltwater boundary, due to saltwater being denser than fresh water. A member of the crew, who dives this area, confirmed you can taste the salinity differences in the water masses!
It’s a great example of the interesting physical affects you get between layers of salt and freshwater, with waves propagating between the different layers and different densities. In fact, the plot even shows substructure within the freshwater layer, indicating the existence of more complicated water properties.
Marine mammals and their wake
Another interesting physical effect that appears in our data is the wake from marine mammals, as shown in this waterfall plot, which is measuring velocity magnitude down to about 32 m.
The discrete regions shown in this plot are marine mammals. For the largest of these, the visibility of its wake reinforced this interpretation and gives us confidence in SPRINT-Nav’s ADCP wake detection capability.
Slack to tidal run
Finally, just for fun, we undertook a series of transits across the same stretch of water starting at slack high tide. Again, the plot shows water velocity increasing in pace, as it falls off slack high tide.

We were pleased with the end results of the trials. We got some fantastic data and achieved current measurements down to 120 m.
We can see many scenarios where this capability – from a single instrument – will be hugely beneficial to projects, from USV operations to offshore dredging. However, we’d most like to hear where you, the user, think this functionality could be best put to use. We’re here to help make it happen. Get in touch if you would like to know more.
