Welcome to our blog! At Sonardyne, we only use true north seeking gyrocompasses, not magnetic sensors, in our SPRINT-Nav range of hybrid-navigation products. Today we’re going to discuss why this is important for your subsea navigational needs.
The choice of inertial measurement unit (IMU) technology in our SPRINT systems is critical, as it significantly impacts their accuracy and reliability. We’ll discuss why this technology is so essential and compare the pros and cons of different IMU technologies to help you understand the best options for underwater navigation.
Join us as we dive into the details!
Candidate technologies:
Finding true north subsea is challenging as satellite signals cannot penetrate water, making it impossible to use GNSS heading devices. Operating below the surface in GNSS denied environments requires trust in the orientation data, especially heading. As a result, two dominant technologies have emerged:
- those that find north by sensing the Earth’s magnetic field, such as magnetometers
- those that determine north by sensing the Earth’s rotation, like gyroscopic systems
Magnetic heading
A magnetic heading sensor determines orientation by detecting the earth’s magnetic field. This sensor typically contains a set of three orthogonally arranged magneto-resistive elements, which measure the strength and direction of the magnetic field in three dimensions.
By comparing the measured magnetic vectors to geographic north, the sensor can calculate the device’s heading or orientation relative to true north. Some systems may use algorithms and filters to process the raw data to correct for any distortions or interferences from local magnetic fields (such as nearby metallic structures or motors).
True north seeking gyrocompass systems
Finding north with a gyrocompass relies on utilising a gyroscope to detect and align with the Earth’s rotational axis. As the Earth rotates, the gyrocompass senses this movement and establishes true north based on this. The method provides reliable orientation information independent of magnetic influences.
The core inertial sensor assembly (ISA) block used within true north seeking gyroscopes consists of orthogonal triads of Ring Laser Gyroscopes (RLGs) or Fibre Optic Gyroscopes (FOGs) which provide angular rate and are used alongside accelerometers. Navigation-grade gyroscopes range in accuracy from less than a milli-degree, up to 0.5 degrees per hour of drift.
Sonardyne always uses navigation-grade gyroscopes as beyond this range the effectiveness of gyro compassing algorithms diminishes. From precisely measuring the angular rate, reliable headings can be accurately computed. Crucially, this is regardless of external disturbances.

Figure 1. A Honeywell ring laser gyrocompass.
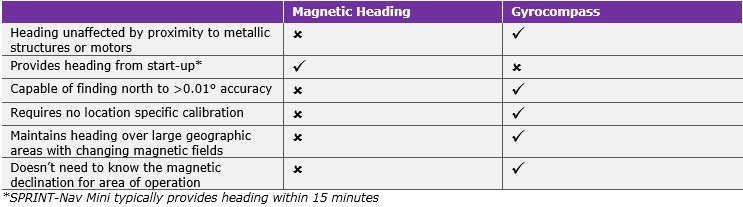
The table below summarises the key differentiators between the technologies which impact navigation performance.
So, what does this give you?
Geophysical survey, sidescan:
Accurate heading is essential for reliably interpreting sidescan or any geophysical mapping data. Sidescan sonar systems create detailed images of the seafloor or underwater structures using acoustic signals, with the orientation of these images when mosaiced dependent on precise device heading relative to true north. They are often used with lower grade magnetic heading sensors, undermining data quality. However, if paired with a true north seeking INS, data quality is improved.
This is one reason users of multi aperture sonar (MAS) and synthetic aperture sonar (SAS) systems always pair with true north seeking inertial navigation system (INS), such as SPRINT-Nav. Typically, Multibeam and laser systems will also always be used with a gyro-compassing INS.
Dependable heading data enhances the accuracy and utility of mapping and inspection datasets, reducing errors and the need for reruns.

Figure 2 – Wavefront’s Solstice MAS is always paired with a true north seeking INS system for optimum data quality. Even next to metallic objects, such as this submarine, that would impact magnetic heading sensors.
Asset inspection:
Inspecting metallic subsea assets like quay walls, wind turbines and energy infrastructure poses challenges when using a magnetic compass due to the magnetic interference from these structures themselves, resulting in errors in heading. This can cause problems such as:
- Inability for ROVs to station keep near infrastructure
- Autonomous systems not being able to inspect metallic structures

Figure 3 – A crucial part of the data collected during trials at the Offshore Renewable Energy Catapult (OREC) was SPRINT-Nav Mini’s ability to maintain heading and position close to metallic structures.
UUV navigation
Smaller Uncrewed Underwater Vehicles (UUVs), such as ROVs and AUVs, are highly manoeuvrable robots designed for tasks such as environmental monitoring and infrastructure inspection. A reliable IMU is crucial for these vehicles to navigate accurately in complex underwater environments.
For this reason, all medium to large ROVs and AUVs have a gyro compassing heading sensor as standard fit, enabling them to perform missions effectively and autonomously. Intrinsically, magnetic heading sensors are lower accuracy, as the below table highlights.
The table below indicates a best-case scenario from a magnetic heading sensor, without accounting for any magnetic noise in the environment. SPRINT-Nav systems will perform to better than this specification regardless of the magnetic environment.

Conclusion
In summary, while magnetic compasses offer a budget-friendly option for basic navigation needs, the unmatched accuracy and reliability of Sonardyne SPRINT-Nav systems make them indispensable for professional survey and inspection applications.
Investing in a SPRINT-Nav ensures precise and dependable positioning and orientation data, crucial for detailed mapping, precise asset inspection and comprehensive scientific research in challenging underwater environments.
The SPRINT-Nav family provide the optimum calibration free performance in the market for their size, weight and power. Thanks in no small part to the true north seeking gyrocompasses inside.
________________________________________________________
John Houlder, Aidan Thorn, Oliver Tracey, Thomas Hitchcox.
Want to know more about our navigation solutions? Visit the product pages.
If you’d like to enquire about SPRINT-Nav or another Sonardyne product, please contact us.
For all the latest Sonardyne news and updates, follow us on social media!