At Sonardyne we are experts at manufacturing and deploying sensors underwater for prolonged periods of time. We offer solutions that are ready to be deployed now. We configure them with modular building blocks meaning that we can work with customers to meet new requirements. In this series of blogs, Ioseba Tena will be looking at examples of long-endurance sensors we can deploy today, why it’s perhaps not as easy as you think to do this, and, finally, a closer look at how our systems are built. Let’s get started.
Submarines have been a persistent threat since their invention. They are capable of operating while remaining undetected and, therefore, projecting force in remote locations. Since the introduction of nuclear-powered systems, they have been able to remain on prolonged deployments. Today, the threat no longer stops there. Unmanned underwater vehicles (UUVs) and a new generation of extra-large UUVs (XLUUVs), with increased range and more capable payloads, are now being introduced to support incumbent nuclear submarine fleets.
Traditional anti-submarine warfare (ASW), while effective, requires significant investment and ties up our warfighting ships – our nations’ prized assets – to the task of trailing possible contacts. As the number of threats proliferate, we become limited by our ability to grow our fleets. This means we need to find new ways to achieve scale.
Leveraging uncrewed systems for ASW operations
Our own unmanned systems can come to the rescue, helping us to project our own strength and our ASW capability, by detecting threats further away and providing us with the opportunity to react to them sooner; informing our fleet before the threat reaches its target.
What better way to do this than deploying unattended sensors at choke points to help monitor persistently or even to have them support our XLUUV fleet in finding its way? They can be part of the ASW mix, by passively monitoring known routes. Alternatively, they can be used by XLUUVs to upload and download data or take/adjust their marching orders based on recent observations.
Today’s unattended sensors can be formidably capable. We have been operating them for a long time in the commercial and ocean science sectors. Our close to five decades of experience in instrumenting the underwater domain has seen us deliver systems in all types of environments in support of everything from oceanographic missions and long-term geological studies to persistent monitoring of subsea assets. The technology is field proven and can change the game.
What can our unattended sensors do today?
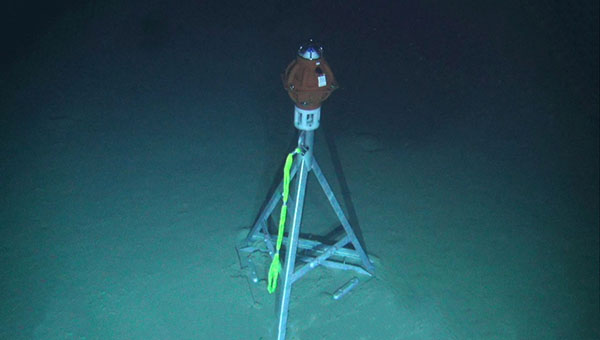
Take for instance our Pressure Inverted Echo Sounders (PIES) used in support of oceanographic missions and measuring average sound speed in the water column. PIES can be configured for autonomous monitoring over periods of several months or multiple years. PIES use an up chirp to accurately measure two-way travel-time through the water column. Simultaneously, they also measure pressure at the seabed. Pressure measurements are converted to depth to find the acoustic distance travelled from the seabed to the surface and back again. By combining the depth and travel time, the average sound speed in the water column can be calculated. An embedded acoustic modem allows you to retrieve that data – i.e. two-way travel-time in seconds and pressure in kilo Pascals.
By strategically deploying arrays of PIES we can persistently monitor sound speed profiles across a large body of water. This data can be harvested using our acoustic modems mounted on surface assets like uncrewed surface vessels (USVs) and used in direct support of ASW operations.
Autonomous navigation anywhere

If you need to support underwater navigation, our Autonomous Monitoring Transponder (AMT) is a long-endurance transponder, extensively used for subsea survey tasks and capable of autonomously acquiring acoustic ranges and sensor data without surface control. It can be used to provide a range and a local navigation reference in aid of inertial navigation systems; providing a constant reference to any underwater traffic.
- Deploy it anywhere for prolonged periods of time.
- It can be programmed to wait in silence until activated by a known acoustic signal to then provide a range to a known location, which can be used as a navigation aid.
- It can be programmed to provide updates at regular intervals.
- The AMT can be used as a forward deployed navigation outpost, providing a used to aid the navigation of XLUUV systems.
- It can also be used in support of surface craft navigation when GNSS denial is a threat.
- Surface craft can be equipped with ultra-short baseline navigation systems and navigate relative to an AMT on a known location.
We have decades of experience designing, manufacturing, deploying and recovering unattended sensors. It is in our DNA. PIES and AMT are just two. Do you have a mission in mind? Get in touch with us and we will be happy to explore what is possible.
In the next instalment, I’ll take a look at what actually goes into making these sensors. Yes, it is as hard as you might think.
Over the past three years we focused heavily on building our latest obstacle avoidance sonar. We set ourselves significant targets. We wanted our latest forward looking sonar (FLS) to do everything and more than our previous FLS, enabling navigation in challenging environments, such as uncharted or dynamic waters. But we also wanted to design a system compact and low-power enough that it could be easier to install into smaller vessels – even swimmer delivery vehicles (SDV) or uncrewed/ unmanned surface vessels (USVs). And we wanted it to come with a simple, intuitive interface with automated alarms and easy to interpret seafloor bathymetry so that users, from oil tanker captains to underwater gear clad SDV operators, are always aware of their underwater environment in a way that’s easiest for them.

Collision avoidance with Vigilant
The result is Vigilant. We like it and our customers, from Superyacht to SDV owners, do too. But we’re always really happy to try it out on new vessels and in new environments. So we were hugely excited to be invited to demonstrate Vigilant to the Stiletto Maritime Demonstration Platform at the Naval Surface Warfare Center Carderock Division (NSWCCD) in Virginia, US. Stiletto was looking, specifically, for capability demonstration of real-time obstacle avoidance for high-speed landing craft in shallow waters, using vessel-mounted surveillance systems.
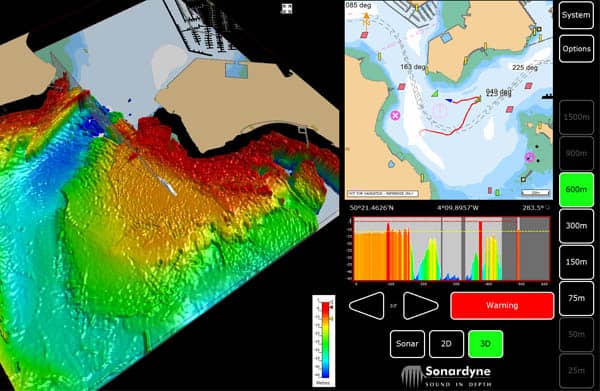
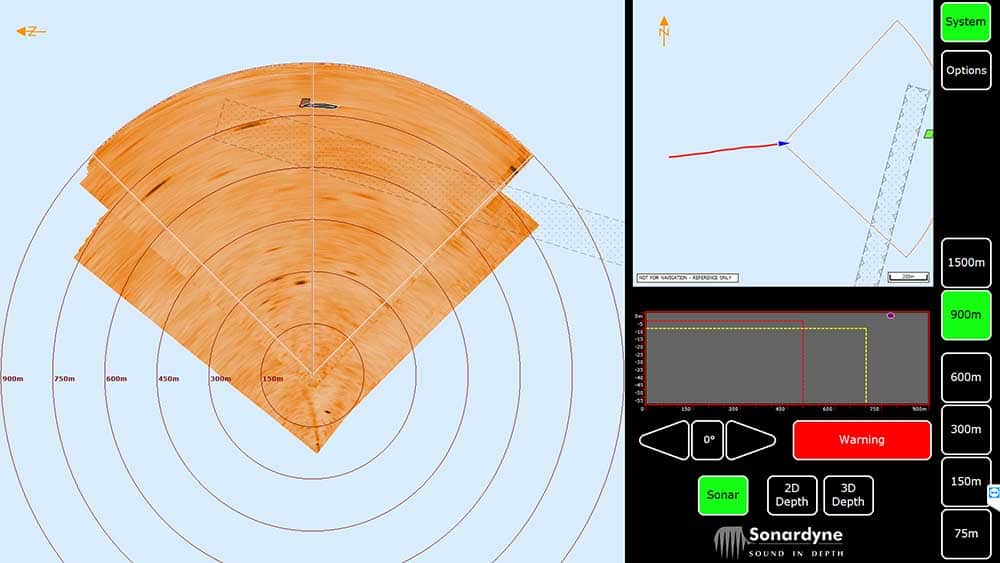
Just in case you don’t know, Vigilant is our long-range, forward-looking sonar for seaborne obstacle avoidance. It works by transmitting acoustic energy into the water, through a 90 degree azimuth and through a vertical plane down to 100 m water depth – deeper than any other system in the market. It then listens for the sonar returns. These are used to detect objects in the water column out to as far as 1,500 m (4,921 ft) away in Vigilant’s Sonar made. In 3D mode, frequency encoded sonar returns are processed through a unique Altitude Confidence Filter (ACF) in order to create a really easy to interpret 3D visualization of the seabed depth and bathymetry and depth of objects in the water column, all out to 600 m (1,968 ft) down to 100 m depth. This data is also retained, so it’s easy for navigators to retrace their steps.
3D bathymetry and long range obstacle detection
The user can seamlessly toggle between Sonar and 3D mode, depending on their navigational requirements – with zero delay in the data displayed on their graphical user interface. So, in open waters, its configurable CAD markers can alert the operator (or a third-party AI based processor) to the presence of a navigationally relevant obstacle, such as coral reefs, rocks, containers or even small ice bergs. In shallow waters and close to shore, they might prefer to see the bathymetry and water depth ahead. The bathymetry is so clear it can even be used to find a good anchorage – and they’ll still get the CAD marker alerts, even when in 3D mode. It’s just these sorts of details the Stiletto team were interested to see.
We mobilized to the Chesapeake Bay area in Virginia (not to far from my office in the DC Metro area), where NSWCCD’s Combat Craft Division is based, and got set up. At this point we have to thank the Stiletto team for helping us with our sonar head deployment pole. Being a temporary deployment, the sonar head was mounted externally using a pole mount. But we were sent the wrong type of pole, so we needed to make some last minute changes. Thanks to the Stiletto team’s help, we got a new deployment system rigged up on the navy range test craft and we were soon out on the sea trials running over three days – socially distanced of course – in and around Chesapeake Bay. Despite some pretty rough weather on the first day and having to give up mid-day on the third day, as our last-minute deployment pole set-up gave out in what was fairly rough weather, we got some great results.
Meeting mission objectives
The challenges set by the Stiletto project included being able to detect obstacles (such as mine like objects, debris or boats) while the vessel is transiting at speed of up to 10 knots, see out to 914 m (3,000 ft) in up to sea state 3 or greater for longer than 24 hours. Near real-time data would be required, with audible alerts, an easy to use visual display that can overlay on navigational charts, such as EDCIS, with no specialist training required for its use. And the vessel it’s mounted on must be able to beach. We were pretty confident it could achieve all of these tasks and more. For example, we’ve proven Vigilant at up to 25 knots and our ability to detect obstacles out to 1,500 m in sonar mode.
During the trials we were pleased to demonstrate some of these capabilities, including detecting a floating navigation marker at 1,090 m distance in Sonar mode while in less than 8 m water depth and a channel market at 850 m in similar depths.
We’d like to thank the Stiletto team for inviting us to demonstrate Vigilant. If you’d like to learn more about Vigilant, please get in touch.
Hunting for wrecks can be a challenging exercise, especially when only an approximate location is known and a wide area of seabed has to be searched. Even then, you need highly trained operators to interpret the sonar data and determine if a target is of interest or not.
A major reason for this is that, often, low frequency sonar systems are selected in order to achieve a wide swath. That means targets of interest can be missed because they just don’t offer the resolution needed. Selecting a sonar with a wide swath can also result in shorter deployments when using an autonomous or unmanned underwater vehicle (AUV/UUV), not because they cover larger areas but because they need more energy.
Wide swath, high resolution
One of the advantages of using our Solstice side scan sonar is that you get a 200 m swath at high frequency resulting in a high area coverage rate and resolution that’s so good even an untrained eye can determine if a target they’re looking at is the wreck you’re hunting for.
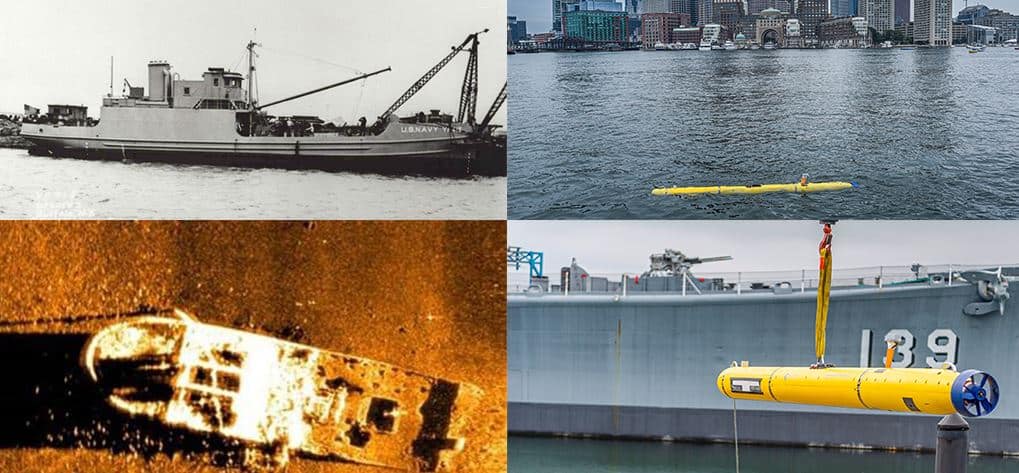
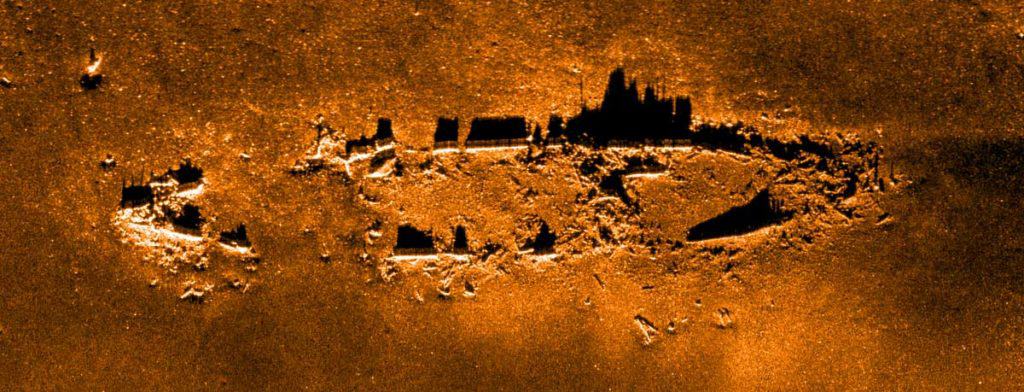
A General Dynamics demonstration using a Bluefin-12 UUV integrated with a Solstice MAS for the Royal Australian Navy (RAN) is a great example of this capability. During sea trials, as part of the RAN’s SEA 1778 Program to develop mine countermeasures, the Solstice data located the 1944 wreck of the USS YF-415.
General Dynamic’s Greg Jennings explains: “We initially found the USS YF-415 while performing acceptance testing with our SEA 1778 customers from Thales and the Royal Australian Navy. We were required to demonstrate the 24 hours endurance of the Bluefin-12 and chose to perform a large survey in an area where there were charted shipwrecks, in hopes of finding something interesting. When we came back to shore Monday evening and reviewed the data, I was stunned to find this beautifully intact wreck in a location where no wrecks were charted. The team was particularly excited about the find because we were really interested in capturing imagery of a shipwreck.”
In the following days, the team spent some more time logging the position of the wreck and searching other known wrecks in the area. It wasn’t until several weeks later, after Jordan Corbin, the Program Manager, contacted the Massachusetts Board of Marine Archeology, that they learned that it was the USS YF-415.
It was a sobering discovery. The USS YF-415, now resting in 240 ft water depth near Boston Harbor, was a type of barge used to transfer goods. In 1944, the vessel was conducting a routine obsolete ammunition dump when signal flares caught fire and ignited shells, leading to a series of explosions that sank the ship.
“The story really hit home for me because the ship had left dock just across the Back River from my home. It was quite sobering to learn of the tragedy behind the wreck. I hope that the families affected can find some solace in the beauty of the wreck. The imagery also shows large schools of fish surrounding the wreck, demonstrating how the sea has turned this gravestone into a monument to life.”
Side scan sonar for endurance UUVs
Solstice has been the multi-aperture sonar (MAS) of choice for General Dynamic’s Bluefin-12 since 2014 and is now also factory fit as standard on the Bluefin-9 as well.
The Bluefin-12’s offers long-range endurance, being able to run for 24 hours. The integration of our Solstice MAS, and on-board data processing features were key to the demonstration for the RAN. Its capabilities enable the Bluefin-12 to successfully provide ample mission-time and effective data collection and processing, yielding important information to help any team using it to assess and refine their mission. It also meant that the General Dynamics team were able to discover and enable the identification of the USS YF-415.
Ideal also for towfish
But while Solstice was initially designed for integration into UUVs, for wide area, high resolution mapping, whether that’s for survey, search and salvage, environmental monitoring or unexploded ordnance (UXO) survey operations, it’s also great from other platforms including towfish, as we demonstrated in a joint project with another Covelya Group company, EIVA. We trialled Solstice onboard EIVA’s ScanFish 3D remotely operated towed vehicle (ROTV), with great results, as you can see below.
With our SPRINT INS (inertial navigation system) onboard, and tracking using our Mini-Ranger 2 USBL system, it proved to be a real alternative to traditional synthetic aperture sonar (SAS) systems. Read more about the ScanFish 3D with Solstice here.
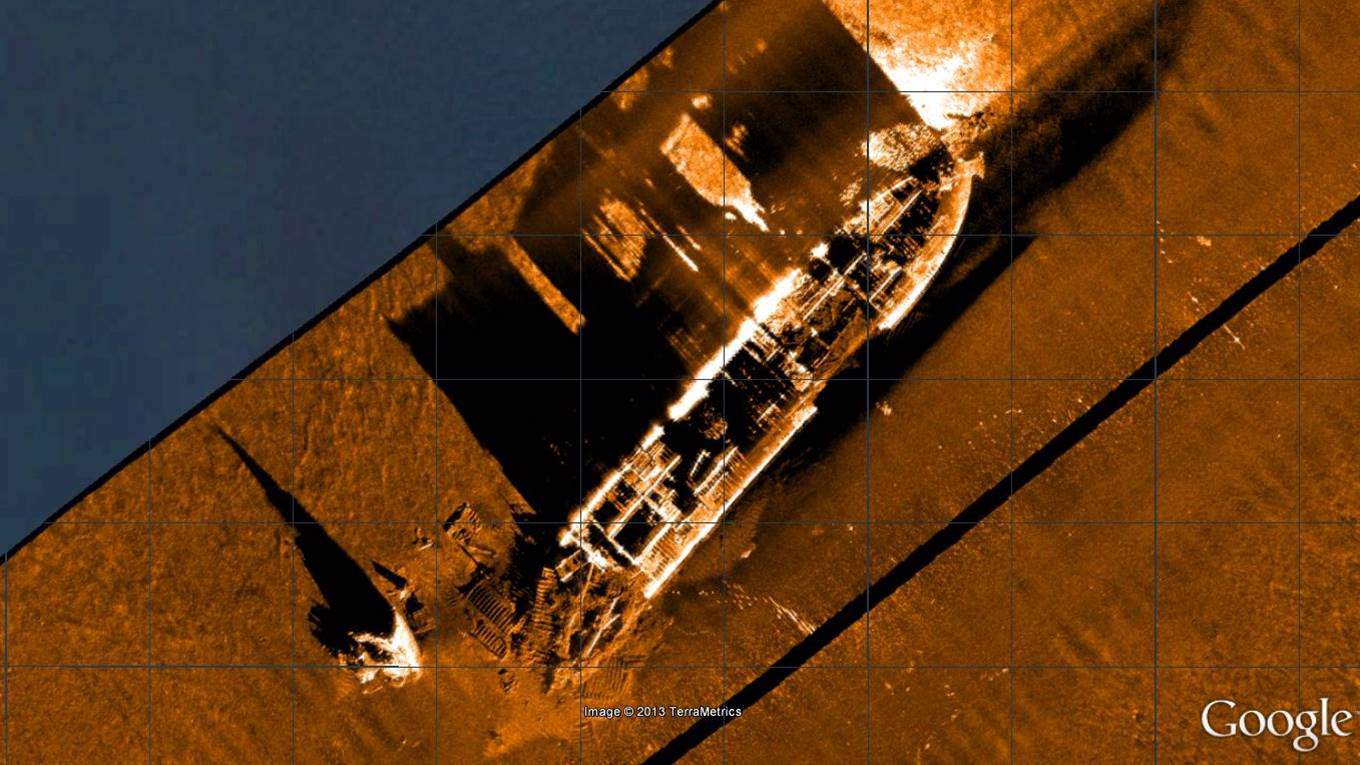
We’ve also deployed Solstice from our trials’ vessel, Echo Explorer. While not ideal – mounting the sonar from a vessel couples it to the sea surface, so it’s a harsh test – we’ve still gathered some superb imagery of wrecks, including the US liberty ship James Egan Layne, which was hit by a torpedo from a German U-boat near the Eddystone reef. Attempts were made to tow her ashore, but her stern collapsed causing her to sink.
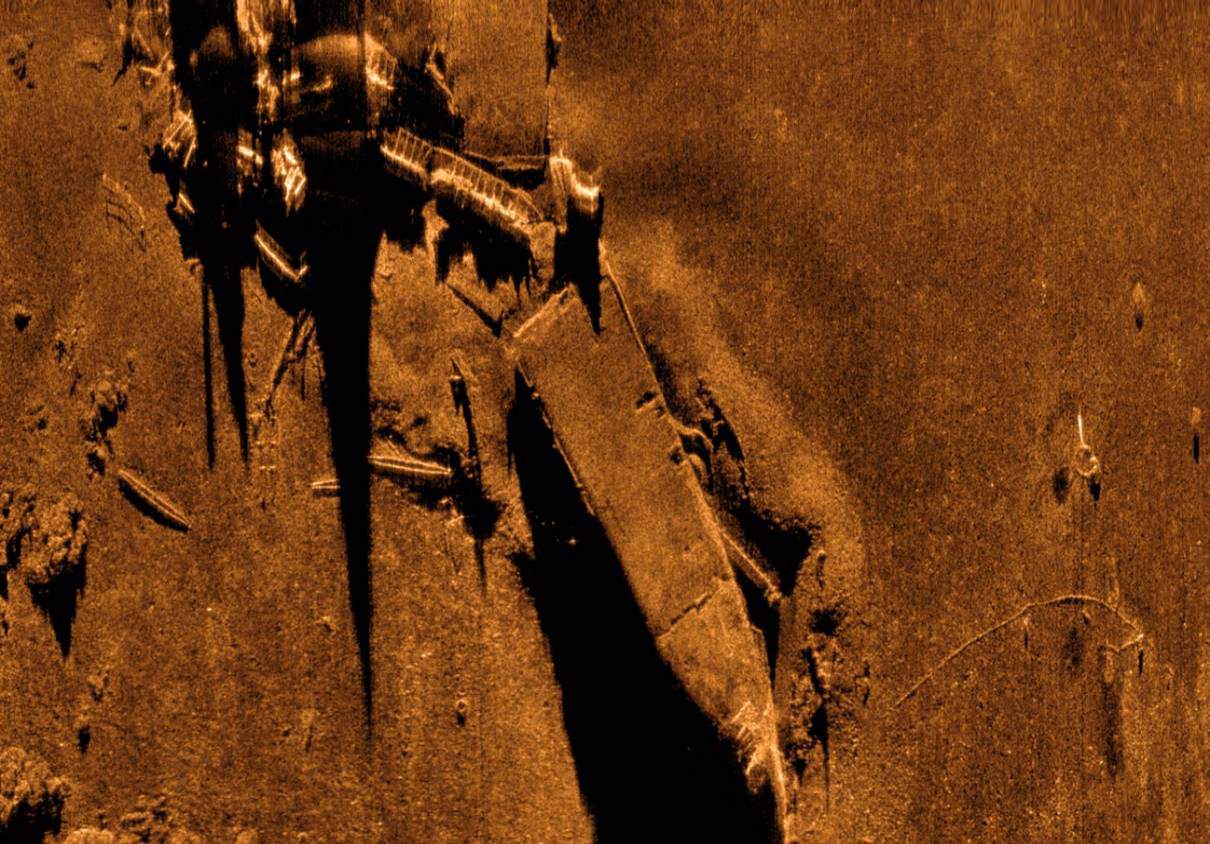
We also really like this imagery of the MV Fylrix, a general cargo ship which was towed and anchored in Jennycliff Bay, near Plymouth, after suffering severe listing, before eventually sinking. The vessel was irrecoverable and ended up being used for underwater explosives training. The image below was also generated using Solstice on a pole mount from Echo Explorer.
Get in touch with us to find out how Solstice can support greater coverage in higher resolution for your mission.
As an engineering company, we like numbers – very precise numbers in fact. While those numbers normally relate to water depth, range, frequency or days of vessel time saved using our equipment, etc., we’re currently getting to grips with some new numbers relating to our energy use and carbon footprint.
At the beginning of this year, we had 1,316 solar panels installed by Clean Earth Energy across the three buildings that make up our UK headquarter campus; Ocean House, Fathom House and Haven House. Each unit measures 201.5 cm × 99.6 cm, so in total they cover 2,641 m² (or just under 13 tennis courts). They’re the latest, most efficient panels and inverters on the market; JA Solar 405W high-efficiency PERC half-cell modules and SolarEdge inverters, respectively, which unlike earlier generation panels, allow us to individually monitor every panel for efficiency and performance.

A solar powerhouse – or rather three powerhouses
Together, our rooftop solar farm amounts to 533 kW that will generate in our part of southern England around 470,000 kWh per year. We estimate this will cover a minimum of a third of the energy consumption across our three buildings. That’s an annual 120 tonnes of CO2 equivalent emissions (CO2e) we have prevented from being emitted, not to mention the clean energy going back into the national grid when we’re not consuming it. It’s a great investment and one which has been several years in the making.
But while we’re hugely pleased to have these panels up and running, solar power generation is just the latest energy saving initiative we’ve committed to. In 2018, we invested in a Building Management System (BMS), which has learning algorithms to make the most efficient use of energy. It looks at how the building is heating and cooling to maximize efficiency, using things like destratification fans to move heat in a large space. We also changed all our light bulbs to LED panels and upgraded our heating systems to the most efficient types, including adding heat pumps. The result was that, between 2015-2019, energy consumption across our Blackbushe site was reduced by 23.5%. We’ve also reduced our travel overheads (even prior to Covid-related restrictions). What’s more, the electricity we are buying is all renewable, under a 100% renewable electricity supply we have, and now, thanks to the solar arrays, we’re putting more renewable power into the grid under Ofgem’s Renewable Energy Guarantees of Origin (REGO) scheme.
Calculating CO2e savings
Needless to say, for the past few years we’ve been formally calculating our carbon footprint, using the government approved PAS 2060 Specification, which has shown that, between 2018-2019, we reduced our emissions from 1,047 to 737 tonnes. With the solar panels coming online this year, we’ll see another dramatic drop in our 2019-2020 numbers.
All of these initiatives tie into our ISO 50001 Energy Management System Standard certification, which provides a framework of requirements relating to more efficient use of energy and continued improvement of energy management, so our efforts certainly do not and will not end here. We’re already looking at what more we can do. We’re also compliant with Energy Saving Opportunity Scheme (ESOS) Regulations and the Streamlined Energy and Carbon Reporting scheme.
Reduced waste as well as energy consumption
Of course, our impact on the environment doesn’t end there. We have also been focusing on reducing our waste streams across our sites globally, diverting more to recycling and doing more on a paperless basis. This has resulted in the removal of many tonnes of paper from our archives over the past 11 months, all of which has been recycled responsibly by a specialist. Our product design and manufacture through to recycling also follow European directives such as the Restriction of Hazardous Substances (RoHS) and Waste Electrical and Electronic Equipment (WEEE), using quality, sustainably sourced recyclable components.
There’s more to come, but if you’re interested in what we’ve done to date, feel free to get in touch.