Author: Malik Chibah – Engineering Manager
We hosted a live, in-water demonstration of our new SPRINT-Nav, acoustically aided inertial navigation system (AAINS), at our Plymouth trials facility, UK. We wanted to put our new technology through its paces, to really demonstrate why SPRINT-Nav will be the new industry leader in subsea vehicle hybrid navigation.
Our SPRINT-Nav combines high-performance INS with unique tight integration of raw, low level digital signal processing from the latest generation Sonardyne Wideband LBL and DVL acoustics, all time synchronised to the micro second level.
 It wasn’t all plain sailing though. The weather was against us, and the environmental conditions around Plymouth are testing at the best of times. DVL performance in particular is adversely affected by the poor sea state as there was excessive acceleration for the DVL itself at the bottom of the pole due to the large pitch and roll of the vessel and increased aeration in the water. However, SPRINT-Nav still performed with outstanding results, which is a real testament to the robustness of this system.
It wasn’t all plain sailing though. The weather was against us, and the environmental conditions around Plymouth are testing at the best of times. DVL performance in particular is adversely affected by the poor sea state as there was excessive acceleration for the DVL itself at the bottom of the pole due to the large pitch and roll of the vessel and increased aeration in the water. However, SPRINT-Nav still performed with outstanding results, which is a real testament to the robustness of this system.
Our equipment and set-up
In order to conduct our demonstrations, we took the following equipment with us; SPRINT-Nav mounted on a through-hull pole on our survey vessel to mimic an AUV/ROV. ROVNav6 LBL transceiver to provide LBL aiding to the SPRINT-Nav by ranging to two Compatt 6s, one Compatt 6 was placed at the Plymouth breakwater and one a few kilometres southwest in Cawsands Bay. An SV sensor was used to give us an accurate reading of the water sound velocity, and reference was provided by RTK GPS/GNSS with a nearby base station to give us a base to compare against.
Extraordinary autonomous performance
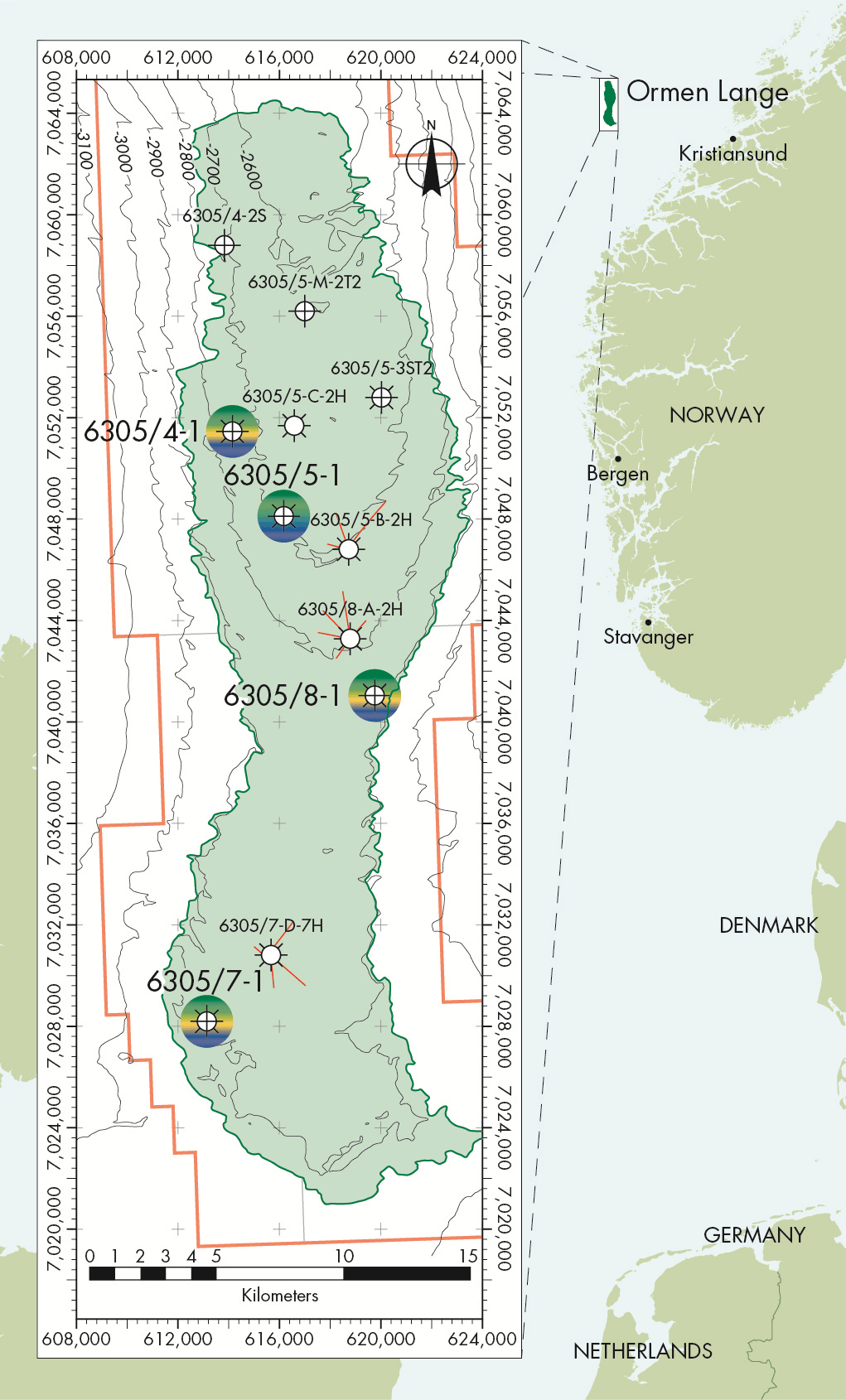
Figure 1 – DVL-INS dead-reckoning and free-inertial AUV dive runs
Despite the rough weather, and rougher sea conditions (over 2 metre high waves!), SPRINT-Nav provided extraordinary high accuracy Doppler-Inertial positioning throughout the demonstration. Observed drift was consistently about 1 meter per 2-3km of travel away from the origin. This level of practical real world performance is unrivalled in the marine industry and forms dependable core functionality for any high performance AUV/ROV.
The map (figure 1) shows all of the runs we completed using autonomous dead-reckoning based positioning, making full use of the diversity in the environment in the Plymouth Sound.
The power of three– using sparse LBL-DVL-INS positioning
We wanted to demonstrate SPRINT-Nav’s ability for tightly integrated sparse LBL. This is where the acoustic two-way-travel time measurements from the passing of a transponder en route of a linear trajectory automatically resets DVL-INS dead-reckoning drift.

Figure 2 Single transponder sparse LBL – DVL – INS positioning
We travelled from the Mountbatten pier (NE), passing the first transponder at the Plymouth Sound breakwater after 3km and arrived at the second transponder located in Cawsand Bay (SW) after about 5.5km, see Figure 2 – transponders are indicated by bright blue diamonds.
The SPRINT-Nav LBL-DVL-INS positioning as compared to the RTK GPS reference is shown below (Table 1). Positioning accuracy was robustly within 2m at all times and reduced to << 0.5m when passing a transponder. Sparse LBL performance and range in the Plymouth Sound is severely compromised by the shallow water and highly complex and variable sound velocity profile.
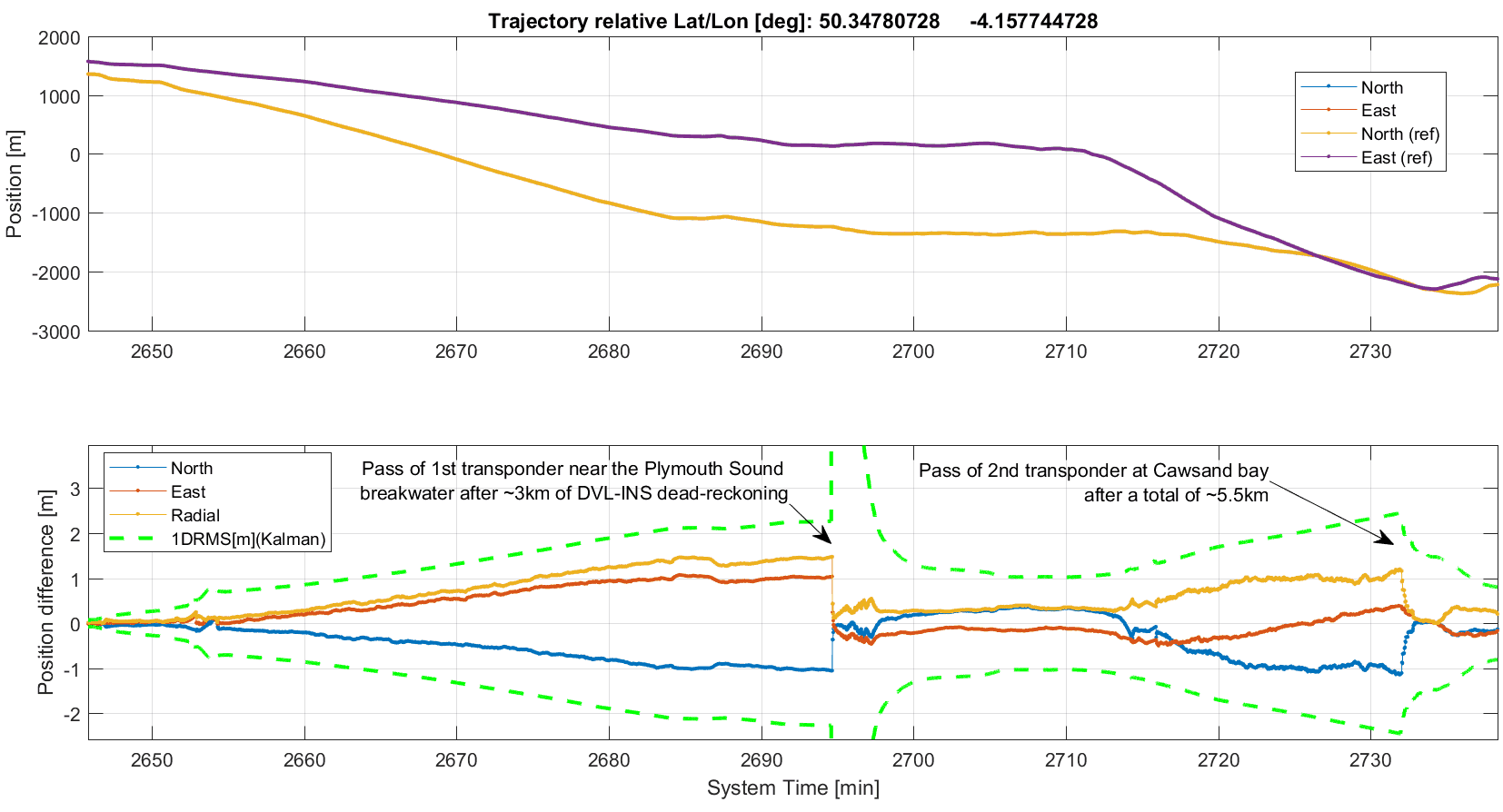
Table 1 – Wide area sparse LBL-DVL-INS vs RTK GPS reference
In a typical offshore environment the realistic transponder maximum ranging distance would be 1 to 3km and SPRINT-Nav accuracy relative to a single transponder would be ~0.1% of slant range (1DRMS), i.e. 1m @ 1km distance when the vehicle passes a transponder at a right angle. The extremely accurate SPRINT-Nav wide area sparse LBL positioning is a consequence of careful tight INS integration of Sonardyne state-of-the-art Wideband DVL and LBL acoustics.
Ultimate accuracy
In order to get the most accurate data possible, it’s necessary to perform post-processing. We have a software product called Janus (named after a Roman god that can look forwards and backwards in time, at the same time – just how the Kalman smoothing technique our software uses works) which reduces the error in the data collected. We took the data that SPRINT-Nav collected during our dive runs and processed it with Janus.
The graph below (Table 2) shows the results from Janus compared to the reference RTK GPS. Radial error is a few decimetres (RMS) and peak error towards the end of the mission is ~0.5m. This is a threefold improvement as compared to the real‑time navigation in the graph above. Often more importantly, the short term relative accuracy and precision is at the sub-mm level to centimetres over 10-100m distances.
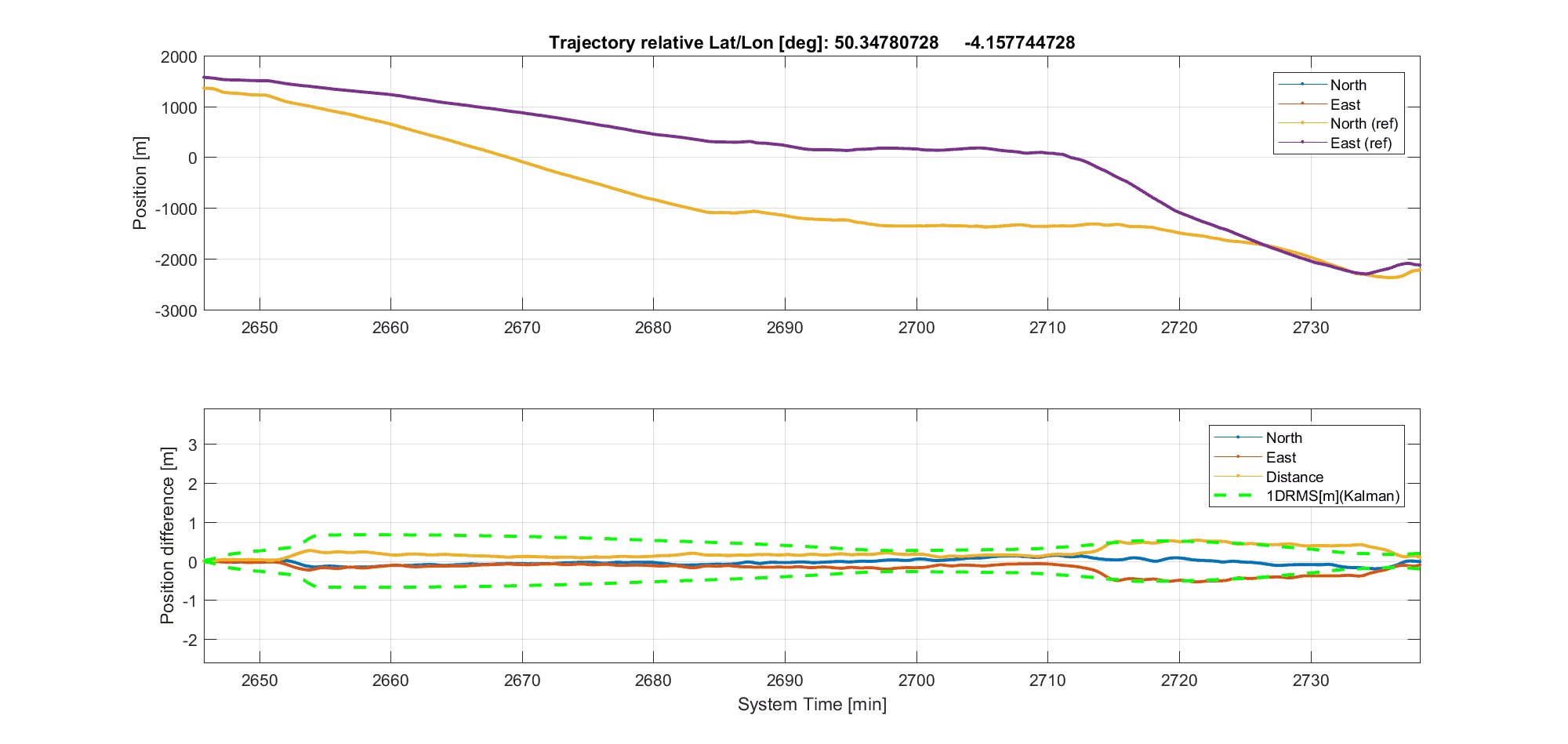
Janus post-processed wide area sparse LBL-DVL-INS
The Janus software is really easy to use. All we had to do was import the data from SRINT-Nav and click a button to perform the post-processing function.
The majority of the radial position error (0.5m) observed towards the end of the test likely stems from LBL sound velocity profile error and potentially the shallow Cawsand Bay seabed transponder experiencing a slight drift along the seabed caused by the very rough seas overnight between time of deployment and the demonstration. Peak post-processed radial position error in a real ROV/AUV operation (10km straight line from known origin with transponders at 5 and 10km) would likely be at the 0.3m level or less.
“Free inertial” AUV dive
On our way back to the marina we took the opportunity to illustrate SPRINT-Nav’s “free-inertial” capabilities. This is where the SPRINT part of the unit is working by itself, without any aiding from the DVL or GPS. The radial peak free-inertial position error was 17m over 8 minutes which reduced to 8.1m following DVL bottom lock. This level of demonstrated performance is on-par with or better than the highest performing competitive product. The key here is that the SPRINT-Nav 500 we used is not our highest performing product. So should you need a higher performing free inertial unit, our SPRINT-Nav 700 variant is the one for you.
 Tight beam level DVL integration and beyond
Tight beam level DVL integration and beyond
Our final demonstration of the day was to highlight how well the tight beam level DVL integration is within SPRINT-Nav. The SPRINT INS user interface provides the ability to selectively switch off processing of individual DVL beams as a simple means of demonstrating the effect and power of tight DVL beam level INS integration. In sequence, processing of 1, 2 and finally 3 beams were switched off. Disabling of one and two beams had a hardly discernible effect on position drift – it remained at <0.25m after 10 minutes. Disabling the third beam caused a significant increase in drift rate as could reasonably be expected. The accrued position error remained below 2 meters after 13 minutes of single beam DVL-INS dead-reckoning.
There are a number of planned future updates to the capabilities of our DVL products, including allowing Syrinx to output <3 beam velocities continuously meaning that if you managed to severely damage your Syrinx DVL, you will still be able to continue with your operations, rather than having to stop until your unit is repaired and reinstalled on the vehicle.
Working throughout the night
After the demonstrations had ended, we decided it would be a good idea to test out the DVL-INS station keeping capabilities of our SPRINT-Nav. We left the unit working away, using DVL and pressure depth aiding, when we left the vessel at 5pm. We returned the next morning to see what had happened over night. In the almost 16 hours SPRINT-Nav had been running, the drift was ~1m. This is pretty impressive considering the strong currents experienced during the period. From this data we would expect SPRINT-Nav to be capable of ~1m drift in a 24 hour period in more benign ROV/AUV station keeping operations.
The time on-board our survey vessel around Plymouth provided us with some great insight into just what SPRINT-Nav is capable of, and we’re excited to see it used offshore, making a positive difference to your subsea vehicle operations.
If you would like to find out any more information about our SPRINT-Nav family, please get in touch to discuss your requirements with us.
Ocean science technology company, Sonardyne International Ltd, UK., announced today it has been awarded the contract to supply Britain’s new polar research vessel, RRS Sir David Attenborough, with subsea acoustic tracking and position reference equipment.
The Ranger 2 Ultra-Short BaseLine (USBL) system will be used by scientists to precisely track the position of, and communicate with, scientific instruments and robotic vehicles deployed from the vessel, including the now famous Boaty McBoatface AUV. Ranger 2 will also be interfaced with the vessel’s dynamic positioning (DP) system for precise station keeping during science operations.
Commissioned by British Antarctic Survey, an institute of the Natural Environment Research Council (NERC), and being built by Cammell Laird in Birkenhead to a Rolls Royce design, the RRS David Attenborough will be one of the most advanced vessels of its type when it enters service in 2019. Measuring 128 metres long and 24 metres wide, the new ship will have a range of 19,000 nautical miles and be able to accommodate up to 60 scientists engaged in ocean, seafloor and atmospheric research.
Sonardyne’s Ranger 2 will support the RRS Sir David Attenborough’s pioneering work by enabling science teams to precisely monitor the position of underwater systems deployed from the vessel. Sonardyne’s exclusive wideband acoustic signal technology and 6G (sixth generation) hardware platform allows autonomous and remotely-operated vehicles, towed platforms and seafloor landers to be simultaneously and precisely tracked to ranges beyond seven kilometres.
Alongside design and engineering services, Rolls Royce is supplying a comprehensive package of control systems and equipment for the vessel, including the DP system. This will utilise data from Ranger 2 to maintain a stable vessel position as equipment and vehicles are deployed and recovered in some of the most challenging marine environments on the planet.
Sonardyne’s contract includes the supply of two through-hull deployment machines, seafloor and vehicle-mounted tracking transponders, and topside control hardware and software. The first equipment deliveries to Cammell Laird for integration into the vessel have already begun.
The commissioning of the RRS Sir David Attenborough represents the UK Government‘s largest investment in polar science since the 1980s. When the ship comes into service, all three Royal Research Ships, James Cook, Discovery and now Sir David Attenborough, will be equipped with Sonardyne underwater positioning technology.
[blockquote author=” Mark Carter, Global Business Manager for Sonardyne”]”As a privately-owned British engineering company, it’s a great honour for our technology to have been selected for Britain’s next polar research vessel. The work now begins to deliver Ranger 2 and support Rolls Royce, Cammell Laird and British Antarctic Survey through the installation and commissioning phases of the project.”[/blockquote]
For more information on Ranger 2, click here.
Maritime security company, Sonardyne International Ltd, UK, has announced that its underwater intruder detection sonar technology, Sentinel, has been installed on the site of a new Critical National Infrastructure (CNI) facility in the Middle East to monitor unauthorised access from the sea. The programme of work included the supply of multiple in-water sonars and redundant control room equipment in order to provide uninterrupted situational awareness over a large waterfront.
CNI facilities such as power plants, dams, gas storage terminals and offshore oil platforms represent attractive targets for sabotage. Many of these installations have comprehensive above-the-water security systems that can include physical barriers, access control, surface radar and long range opto-electrical sensors. However, many are vulnerable to intrusion from the water, and in particular, from below the surface.
Sonardyne’s Sentinel closes this gap in surveillance capability. It reliably detects, tracks and classifies divers and small underwater vehicles approaching a protected asset, alerting security personnel to the potential threat. With a track record spanning more than 10 years, Sentinel is widely regarded as the security industry’s most extensively deployed diver detection sonar.
The small, lightweight design of Sentinel’s in-water sonar unit makes it ideal for mobile security operations but for this contract, Sonardyne’s in-country partner installed the sonars on permanent seabed mounts placed in key locations around the shoreline.
Each sonar is designed to provide 360 degrees of coverage and provides long range warning of incoming targets for the local security personnel to intercept the threat. It is even able to determine, with a high degree of probability, what type of diving equipment they are wearing; open or closed circuit.
Due to the strategic importance of the new facility within the region, for the first time Sonardyne was requested to supply dual redundant control-room equipment to ensure uninterrupted service. All equipment was interfaced with the facility’s third party C2 (Command and Control) security system.
[blockquote author=” Paul Rosewarne, Maritime Security for Sonardyne in the Middle East”]”Our announcement today marks the end of many months of planning and on-site activities with our local technical partners and end client to deliver, install and commission Sentinel at this important new facility. We’re confident that our diver detection technology will provide the same peace of mind as the many other Sentinel systems that are in service across the region.”[/blockquote]
For more information on Sentinel, please click here.